URG-04LX 2維激光掃描測距傳感器的應用試驗研究
2014-01-16 05:57:44林潮興楊偉偉
電子設計工程 2014年14期
胡 煉,林潮興,楊偉偉,許 奕
(華南農業大學 工程學院, 廣東 廣州 510642)
2維激光掃描測距傳感器是基于激光測距原理,通過旋轉的光學部件發射形成二維的掃描面,以實現區域掃描及輪廓測量功能[1]。近年來,2維激光掃描測距傳感產品廣泛用于機器人環境識別、建筑物入侵保護(安防)、自動門/行為方式識別、自動導航車輛(AGV)障礙檢測、無人飛行器避障和自主導航。本文將介紹一種HOKUYO公司的2D激光掃描測距傳感器和其應用,并進行相關測試試驗。
1 URG-04LX的工作原理與簡介
1.1 工作原理
激光發射器發出激光脈沖波,當激光波碰到物體后,部分能量返回,當激光接收器收到返回激光波且返回波的能量足以觸發門檻值。激光發射器發出激光脈沖波時間和收到返回激光波時間,從而計算它到物體的距離值[2]。激光掃描器連續不停的發射激光脈沖波,激光脈沖波打在高速旋轉的鏡面上,將激光脈沖波發射向各個方向從而形成一個二維區域的掃描。二維區域的掃描可以在掃描器的掃描范圍內,設置不同形狀的保護區域,當有物體進入該區域時,發出報警信號;或在掃描器的掃描范圍內,掃描器輸出每個測量點的距離,根據此距離信息,可以計算物體的外型輪廓,坐標定位等[3-7]。
1.2 URG-04LX簡介
HOKUYO公司的URG-04LX 2D激光掃描測距傳感器測距示意圖如圖1所示,采用直流5 V供電,工作電流小于500 mA。激光由波長785 nm的半導體激光二極管產生,激光安全等級I級。傳感器測量距離為60~4 095 mm,掃描視場寬2400,從傳感器頂部看激光以逆時針方向掃描,掃描一周時間為100 ms,共1 024個掃描步進,角度分辨率0.360。在掃描視場內最大有效掃描步數為683,起始步為44,終止步為725。在60~1 000 mm測量距離時測量精度為±10 mm,在1 000 ~4 095 mm 測量距離時測量精度為1%測量距離。傳感器具有全速USB-mini B接口和RS232C接口,測量噪音<25 dB。傳感器體積小,長寬高為50 mm×50 mm×70 mm,且重量輕僅160 g。
2 URG-04LX操作
2.1 URG-04LX測距數據命令
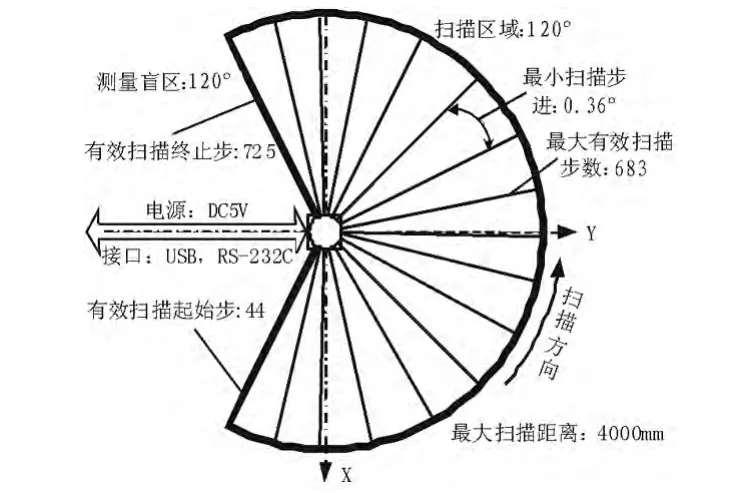
圖1 URG-04LX傳感器測距示意圖Fig. 1 Diagram of distance measurement of URG-04LX
URG-04LX具有全速USB和RS232C兩種外部接口,連接方便,如圖2所示。兩接口可同時使用,也可選擇其中一個接口與計算機或嵌入式系統連接。USB接口具有優先操作權,在無USB接入時將自動切換為RS232C接口操作。為規范通訊,傳感器制定有與計算機或嵌入式系統的通訊協議。傳感器測距數據的發出需向傳感器發送請求命令,在URG-04LX里有4種命令來請求獲得測距數據,分別為MD、MS、GD和GS。命令GD和GS為單個距離數據請求,而MD和MS為連續距離數據請求。命令GD和MD返回的距離數據由3個ASCII字符組成,最大距離為262 144 mm,而GS和MS返回的距離數據由2個ASCII字符組成,最大距離為4 095 mm。
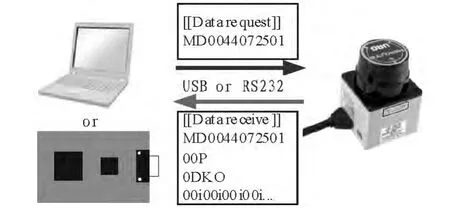
圖2 URG-04LX與設備的連接Fig. 2 Connection of URG-04LX to host-device
MDMS和GDGS指令組成分別如圖3(a)和(b)所示。第1部分為1個ASCII字符,M為連續測量,G為單次測量。第2部分為1個ASCII字符,S表示傳感器返回數據格式為2 ASCII字符數據,M表示傳感器返回數據為3 ASCII字符格式數據。第4和5部分用于設定傳感器測距掃描范圍,URG-04LX傳感器共有750個掃描步,如要獲得最大測量的范圍則Starting point=0044(30H,30H,34H,34H),End point=0750(30H,37H,35H,30H)。第6部分為距離數據合并數,以多個相鄰步中距離值最小的數據作為距離值,如Cluster Count=3,獲得的值分別為3 059,3 055和3 062,則傳感器返回值是3 055,因此Cluster Count的值也決定了傳感器返回距離數據的個數和掃描角度分辨率,如果Cluster Count=2,則返回的距離數據減半,掃描步進角度為0.720。第7部分為掃描間隔,若逐步掃描則Scan Interval=0。MDMS指令比GDGS指令多1個掃描次數部分,用于多數重復測量。
2.2 距離數據處理
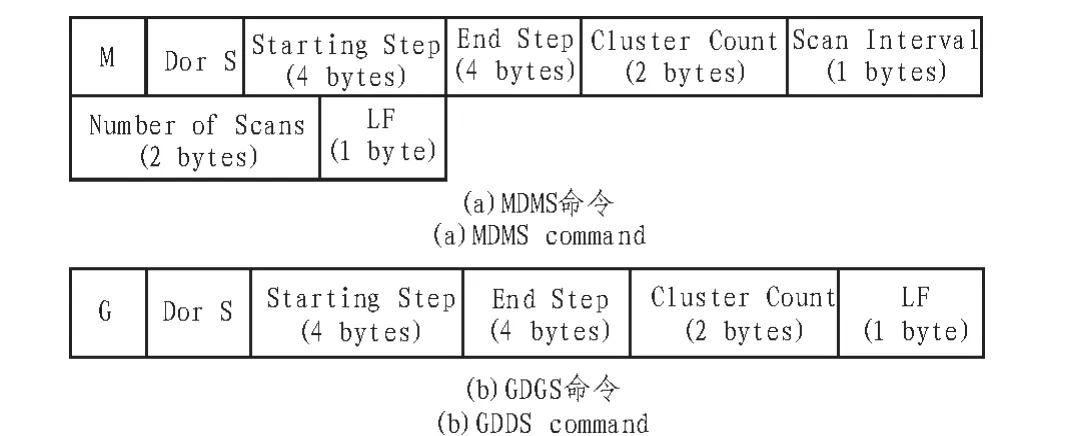
圖3 數據獲取指令Fig. 3 Data acquisition command
URG-04LX傳感器返回的距離數據有2 ASCII字符格式和3 ASCII字符格式,傳感器根據距離數據、通訊協議和數據請求指令將距離值進行編碼,通過傳感器接口輸出。因此對接收到的距離數據需根據協議進行轉換。
2 ASCII字符格式的最大長度為12 bits,用于最大距離不大4 095 mm,3 ASCII字符格式的最大長度為18 bits,用于最大距離不大262 144 mm。根據通訊協議距離數據轉換過程如圖4所示,首先將距離數據分成單個ASCII字符并將每個ASCII字符用十六進制表達;將此十六進制數據減去30H后轉化為二進制表示,最后將各二進制數據合并轉換為十進制便得到相應距離值。
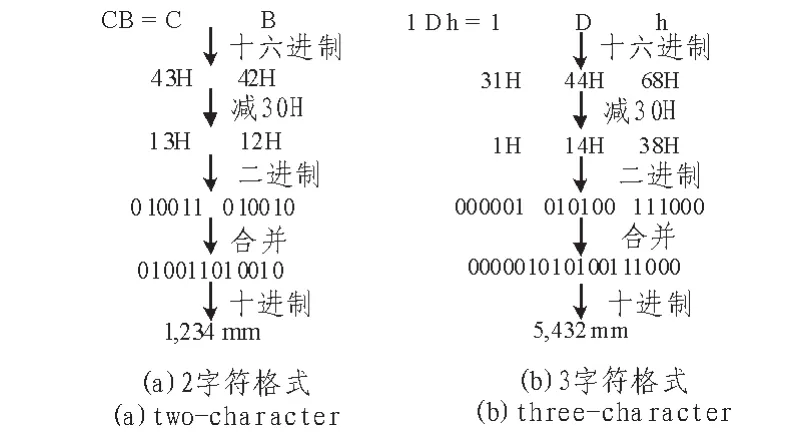
圖4 距離數據轉換Fig. 4 Data conversion of distance
2.3 UrgBenri接收數據
URG-04LX傳感器數據也可以通過USB接口與計算機連接,通過軟件UrgBenri獲得。當USB設備連接成功后,即可以軟件界面上以正交視圖或數據表視圖兩種方式實時查看到圖形或數據。在UrgBenri的操作窗口內可以查看傳感器的相關信息,并可通過命令窗口對傳感器進行設置。UrgBenri能將測量數據以文件形式保存,并能在無傳感器狀態下打開并恢復測量過程。
3 試驗與分析
3.1 距離測量
將URG-04LX 2D激光掃描測距傳感器固定在不同高度(分別為760 mm,1 081 mm,1 404 mm和1 725 mm),使傳感器掃描窗口垂直向下對不同介質平面進行距離測量。測量時掃描從第334步到第434步逐步掃描,每次共101個測量距離值,測量到的距離值投影到Y軸方向上并求取平均值得到傳感器到測量平面的距離,每個測量對象的3次測量結果的平均值如表1所示。
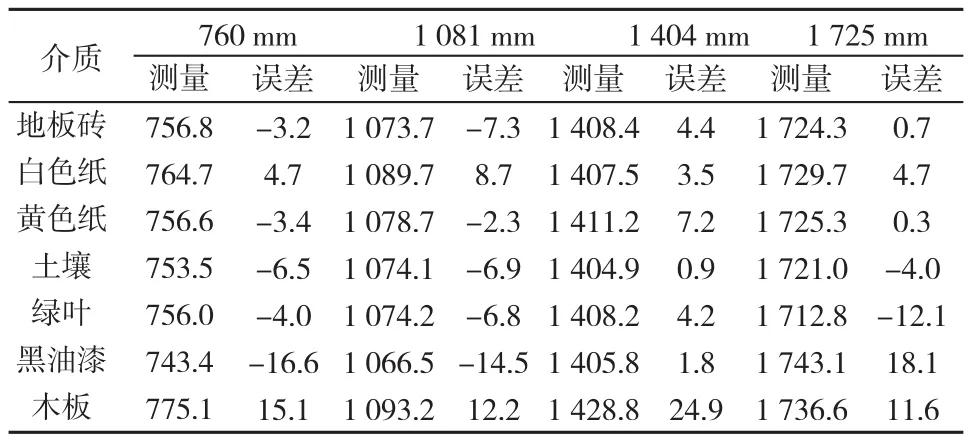
表1 距離測量結果Tab.1 Result of distance measurement
由表1可以知,試驗中傳感器對地板磚、白色紙、黃色紙和土壤進行掃描測量,能準確測量傳感器與檢測對象的距離,在2 m以內的測量誤差小于10 mm。傳感器測量綠色植物也能較好的測量出距離,在1404 mm以內測量時誤差小于10 mm,在1725 mm測量時誤差為±12.1 mm,但并未超出傳感器測量誤差(1%測量距離)。然而傳感器在測量黑油漆和光滑木板時,測量誤差較大,超出傳感器測量誤差范圍,因此,不同的被測對象或顏色導致激光掃描傳感器的測量精度存在差異。
3.2 障礙物檢測
障礙物檢測是URG-04LX 2D激光掃描測距傳感器的重要應用之一,為測試傳感器障礙物檢測性能,布置了如圖5(a)所示3面隔離實驗環境,消除干擾。以中下部傳感器的中心為坐標原點,隔離環境寬870 mm,前部離傳感器中心650 mm。隔離環境內放置了3個圓柱形障礙物(圓柱1半徑為66 mm、圓柱2和圓柱3半徑都為111 mm)和1個矩形障礙物(長邊為80 mm),激光掃描測距傳感器測量結果如圖5(b)所示。
由圖可知,URG-04LX 2D激光掃描測距傳感器的數據能清晰地檢測出隔離環境內的4個障礙物。用障礙物前部的掃描點擬合成直線段,若以直線段長度表示障礙物大小,實驗數據計算出3個圓柱障礙物尺寸分別為58.6 mm、103.0 mm和95.3 mm,矩形長度為82.5 mm,與實際分別相差7.4 mm、8 mm、15.7 mm和2.5 mm。若以直線段中心點(如圖5(a)‘×’所示)到傳感器中心的距離表達障礙物,根據實驗數據計算障礙物的位置分別為(-252.9, 189.7)、(-226.3, 490.3)、(200.1, 362.3)和(25.18,370.9),障礙物距傳感器中心的距離分別為316.2 mm、540.0 mm、413.9 mm和371.7 mm,而實際距離分別為304 mm、543 mm、416 mm和349 mm,分別相差12.2 mm、3 mm、2.1 mm和12.2 mm。
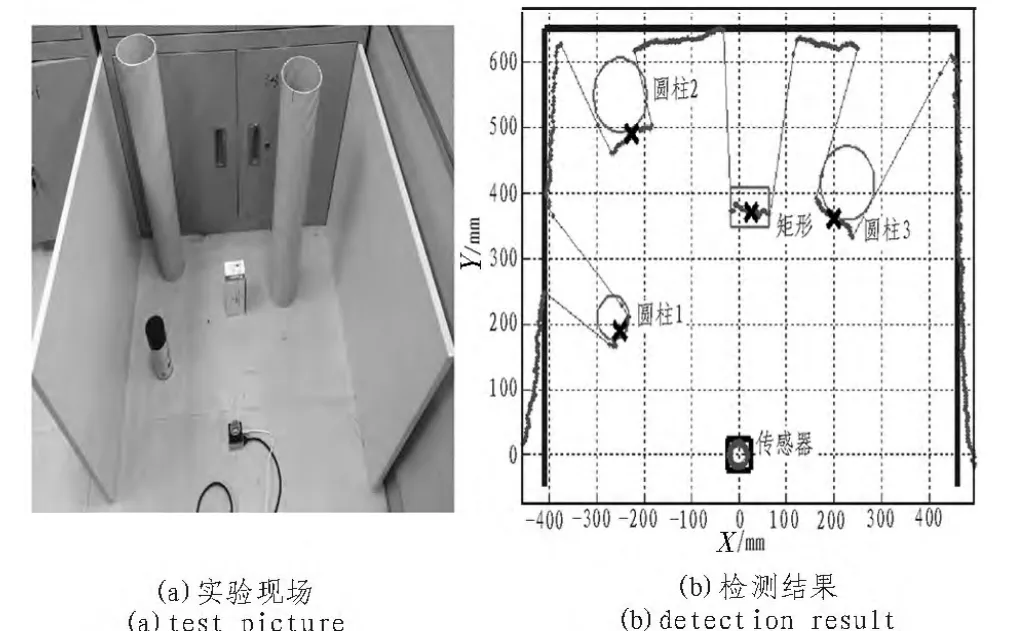
圖5 障礙物檢測Fig. 5 Obstacle detection
4 結 論
URG-04LX 2D激光掃描測距傳感器能快捷進行2維距離測量,實現障礙物檢測和傳感器到平面的距離等,測量精度高。激光掃描測距傳感器還可用于壟行檢測、傾角檢測等,若配合機器視覺等傳感器可進一步提高智能識別程度[5-6]。
[1] 項志宇.基于激光雷達和移動機器人障礙檢測和自定位[D].浙江: 浙江大學,2002.
[2] 陳千頌,楊成偉,潘志文,等.激光飛行時間測距關鍵技術進展[J]. 激光與紅外,2002,32(1):7-10.CHEN Qian-song,YANG Chen-wei,PAN Zhi-wen,et al.A brief introduction on the development of laser time-of-flight distance measurement technology[J].Laser and Infrared, 2002,32(1):7-10.
[3] 陳得寶,趙春霞,張浩峰,等. 基于2維激光測距儀的快速路邊檢測[J].中國圖象圖形學報,2007,12(9):1064-1069.CHEN De-bao, ZHAO Chun-xia, ZHANG Hao-feng, et al.Quick road-boundary detection based on 2D laser range finder[J].Journal of Image and Graphics,2007,12(9):1064-1069.
[4] 馮肖維,方明倫,何永義,等.移動機器人自然路標特征提取方法[J]. 機器人,2010,32(4):540-546.FENG Xiao-wei,FANG Ming-lun,HE Yong-yi,et al.Natural landmark extraction method for mobile robot[J].Robot,2010,32(4):540-546.
[5] 張凱良,楊麗,張鐵中.草莓采摘位置機器視覺與激光輔助定位方法[J].農業機械學報,2010,41(4):151-156.ZHANG Kai-liang, YANG Li, ZHANG Tie-zhong. Object locating method of laser-assisted machine vision for strawberryharvesting[J].Transactions of the Chinese Society for Agricultural machinery, 2010,41(4):151-156.
[6] 張奇,顧偉康. 基于多傳感器數據融合的環境理解及障礙物檢測算法[J]. 機器人,1998,20(2):104-110.ZHANG Qi, GU Wei-kang. Algorithms of environment understanding and obstacle detection based on multi-sensor data fusion[J].Robot,1998,20(2):104-110.
[7] 李配配,鄧雷, 趙永雷. 配電網混合線路單端行波測距方法的研究[J]. 陜西電力,2013(4):70-73.LI Pei-pei,DENG Lei,ZHAO Yong-lei. Study on single-ended traveling wave fault location in distribution network hybrid lines[J]. Shaanxi Electric Power,2013(4):70-73.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
