基于CCP協議的發動機電控單元匹配標定
2014-01-16 05:57:08張成偉龔元明
電子設計工程 2014年6期
張成偉,龔元明
(上海工程技術大學 汽車工程學院,上海 201620)
隨著發動機電控技術的發展,發動機匹配標定已成為發動機管理系統開發不可缺少的重要環節,發動機電子控制單元是發動機管理系統的核心,在發動機管理系統的開發中,有一系列MAP圖參數,需要在匹配標定過程中確定,有了這些MAP圖參數,發動機才能滿足動力性、經濟性和排放性的綜合要求。基于CCP協議的標定系統開發已成為研究的重點。CCP協議(CANCalibration Protocol)是歐洲ASAP項目組[1]基于CAN協議制定的一套對控制系統參數標定的系統。目前基于CAN總線的分布式系統在汽車電子領域得到廣泛應用,發動機電子控制單元的標定已成為發動機電子控制裝置開發的一個重要環節。CCP標定協議是ASAP標準的一部分,它首先是由標定系統制造商提出并開發的,該協議為標定系統開發提供了標準平臺,在電控系統開發方面具有強大的優勢,已逐漸為世界各大汽車公司所采用,如BOSCH公司和DELPHI公司的標定系統。因此基于CAN的CCP協議是匹配標定平臺技術的首選。采用CCP協議可以快速高效地實現對發動機電控單元的標定。
然而基于CCP協議的標定,只有ECU控制器與標定工具底層內部均具有支持CCP協議的驅動程序 (CCPdriver),才能夠實現二者之間數據的傳輸。目前大多數應用都采用Vector公司提供的free CCPdriver。但是其中難免有許多復雜而且不適用的函數,對于代碼的運行效率以及空間占有率都非常不利。基于此,文中設計了一個通用的ECU與CCP驅動接口程序,以幫助縮短整個標定開發周期。
CANape是一款ECU開發、標定、診斷和測量數據采集的綜合性工具。通過CCP標定協議,不僅能完成對ECU的標定,同時還能同步地獲取ECU內部的測量參數,實時采集和顯示ECU內部信號。基于此,本文將闡述如何基于CCP協議使用CANape完成ECU的標定。
1 CCP協議及工作原理
CCP 協議[2]是 ASAP(Arbeitskreis zur Standardisierung von Applikationssystemen)標準的有機組成部分。該協議是符合ASAP中ASAP1 a標準的協議,它基于CAN2.0B通訊協議。
1.1 CCP通信方式
該通信協議采用主-從式通信方式如圖1,主設備通過CAN總線與多臺從設備相連接,主設備是測量標定系統,從設備是需要標定的ECU,主設備首先與其中一個從設備建立邏輯鏈接,建立邏輯連接后,主、從設備之間所有的數據傳遞均由主機控制[3]。

圖1 CCP通信方式Fig.1 CCPcommunication mode
1.2 CCP協議的工作模式
CCP定義了兩種工作模式:Polling(查詢)模式及DAQ(Data Acquisition Command)模式。查詢模式下,主設備與從設備間的每一次通信都由主設備發送命令來起始,從設備收到主設備的命令后,執行相應的操作并反饋一幀報文。這種工作模式由于需要主機與從機之間進行“一問一答”的信息交互,工作效率不高,但實現簡單,且占用ECU內存資源較小。
DAQ模式使從設備可以脫離主設備命令控制按一定周期自動向主設備上傳數據。DAQ模式下,主設備首先發送一條請求DAQ命令,從設備收到后,按命令中參數自行配置并組織需要上傳數據,然后按一定周期自主向主設備上傳數據。這種模式不需要主機命令逐步控制,工作效率高,但實現較復雜,需要上傳數據量很大,會占用大量ECU內存空間。
1.3 CCP報文幀結構
CCP協議中有兩種CAN報文對象如圖2,根據其數據流向,都有一個唯一的ID標識符進行標識,ID在控制器的描述文件(如A2L)中定義,CRO用于主設備向從設備發送數據命令,DTO則用于從設備發送數據至主設備,CRO高于DTO。
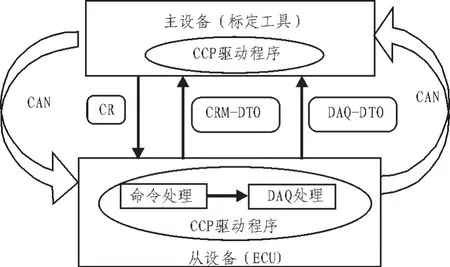
圖2 CCP協議主、從設備CAN報文通信Fig.2 CCPprotocol master and slavedevice CANmessagecommunication
Polling模式下 CRM-DTO (Command Receive Message—Data Transmission Object),為ECU發送給匹配標定工具的命令響應,即對CRO的響應;DAQ模式下 DAQ—DTO(Data Acquisition—Data Transmission Object), 即 ECU發送給匹配標定工具的實時測量數據,用于監控的目的。
2 CCP驅動與CAN驅動接口程序的實現
在使用標定系統對控制器實施基于CCP協議的標定工作前,必須在控制器端程序上進行相應的開發工作。需要上位機 MCS(Measurement Calibration System)與下位機ECU的應用程序都能夠支持CCP協議,這部分應用程序稱為CCPdriver。本文采用Vector公司提供的free CCPdriver[4]。
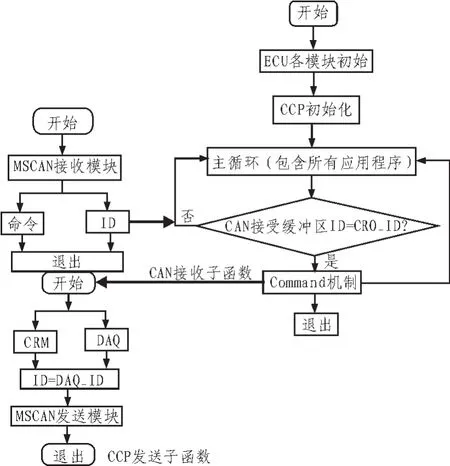
圖3 接口程序基本流程圖Fig.3 Basic flow chart of interface program
主設備發送的命令使用CAN數據幀進入CAN驅動程序的接收模塊,判斷為CRO后,交由CCP驅動程序的命令處理模塊處理。命令處理模塊根據接收到的CRO的CMD代碼進行命令解釋并執行,生成應答數據,包括從應用程序中獲取數據。
基于CCP協議的基本CAN通信流程如圖3所示。ECU接收到報文后,轉入CAN接收子函數,在常規接收流程后,對報文的ID標識符進行判斷,如為CRO-ID,則調用CCP driver的命令處理器。命令處理器的調用會在主函數中進行。
Command處理機制由一個ccp Command()命令處理函數完成,ccp Command()通過調用CAN driver中的CCP發送子函數ccp Send()發送一幀 DTO。ccpSend()須在CAN中實現,由CCPdriver調用。當命令處理模塊判斷收到CRO為DAQ請求后,啟用CCP驅動程序的DAQ處理模塊。DAQ處理模塊從應用程序待監測的變量中組織應答數據,然后調用CAN driver程序的發送模塊,將數據以DAQ-DTO的形式自行周期發送至主設備。
3 CANape進行基于CCP協議的標定
CANape標定系統的結構如圖 4,CANape是德國Vector公司出品的一款基于ASAP標準[5]的車載控制器測試、診斷和標定工具。它通過基于CCP協議的CAN總線物理連接,實現硬件接口與ECU相連。ASAPl作為應用層同控制設備之間接口的標準,定義了應用系統和ECU之間的物理和邏輯連接。其中,ASAPla定義了控制器(ECU)和MCD(Measurement calibration and Diagnostics)系統之間的物理層和協議層。ASAP2標準對ECU功能和接口及標定信息進行了標準和規范化的描述,按此標準生成的ASAP2描述文件作為標定系統的數據庫而保存。ASAP3定義了MCD系統同用戶之間的接口,此標準的目的是使用戶可以通過調用標準化的函數,MCD系統進行數據和命令的交互來實現測量、標定和診斷的功能[6]。

圖4 CANape標定系統的結構Fig.4 Structure of CANape calibration system
CANape對控制器的參數標定和數據測量都是基于ASAP2控制器描述文件,該文件記錄了ECU控制器中各標定參數和測量變量在控制器中的存儲地址、存儲結構、數據類型和轉換公式等。這些標定參數和測量數據都會有一個變量名,如發動機轉速、冷卻水溫度等。當使用CANape進行參數標定時,只需要訪問該變量在ASAP2描述文件的變量名即可,通過變量名找到該變量在控制器中的存儲地址、數據長度等信息,然后進行參數標定與優化并生成MAP圖。
在電控單元標定的過程中,需要標定的參數主要被保存在FLASH或ROM中時,當ECU重新上電初始化后,程序自動將需要標定的參數初始值復制到RAM中。標定過程中,標定工程師通過CANape標定軟件不斷修改和優化Calibration RAM中的參數值。標定全部結束后,再將該段RAM中標定優化后的參數值復制回FLASH或ROM中,并同時通過標定顯示界面可以看到生成的相應MAP圖。
在CANape中標定方法有兩種,分別是在線標定和離線標定。在線標定(有沒有鏡像內存都是可以的),標定對象的值改變時,新的值會立刻下載到鏡像內存和ECU的RAM中,或改變標定對象值,新的值首先存儲在Buffer,不會立刻傳給ECU,直到選擇“更新參數”時,該值才會被下到ECU或保存到鏡像內存。離線標定時(必須激活鏡像內存),標定對象的改變值被保存到鏡像內存中,當變為在線,這些值會下載到ECU中。
4 結 論
在基于現場總線的分布式控制中,汽車網絡技術進一步優化了汽車的電子控制系統,傳統意義的發動機匹配標定方法已無法滿足。基于CAN總線網絡連接的發動機電子控制單元,目前已成為研究和應用的重點。CANape是基于CCP協議的通用型發動機電子控制單元匹配標定工具,在國內新型電控發動機開發過程中得到了廣泛的應用。使用CANape能夠縮短開發周期,快速準確地進行汽車發動機電子控制單元的匹配標定,并在實際開發應用的過程中達到了預期效果,使發動機綜合性能得到提高。
[1]胡嘉,楊正林,張彤,等.基于CCP協議的混合動力整車控制器標定系統及其底層驅動的開發[J].汽車科技,2010,5(4):2-4.HUJia,YANGZheng-lin,ZHANGTong,et al.Hybrid electric vehicle controller based on CCP protocol calibration system and itsunderlyingdriven development[J].Journal of Automotive Technology,2010,5(4):2-4.
[2]李先成.電控噴油系統噴油特性測試和油量線性化自動標定系統開發[D].上海:上海交通大學,2008.
[3]羅峰,孫澤昌.汽車CAN總線系統原理、設計與應用[M].北京:電子工業出版,2010.
[4]陳振輝.基于CCP協議標定混合動力車整車控制器[D].上海:上海交通大學,2007.
[5]李計融,鐘再敏.車載控制器匹配標定ASAP標準綜述[J].汽車科技,2004,10(6):54-58.LI Ji-rong,ZHONG Zai-min.Vehicle matching controller calibration ASAP standard review[J].Journal of Automotive Technology,2004,10(6):54-58.
[6]韋文波.基于CCP協議的電控發動機標定系統開發[D].湖南:湖南大學,2011.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00
汽車與新動力(2015年1期)2015-02-27 12:11:01
消費者報道(2014年7期)2014-07-31 11:23:57