攝像頭智能循跡小車設(shè)計與實(shí)現(xiàn)
2014-01-16 05:56:52李東旭
電子設(shè)計工程 2014年5期
關(guān)鍵詞:智能
閆 熙,韓 媞,高 波,李東旭,楊 杰
(大連東軟信息學(xué)院 遼寧 大連 116000)
隨著智能交通系統(tǒng)的廣泛應(yīng)用,智能車的系統(tǒng)控制也逐步成為一項新興技術(shù),該領(lǐng)域涵蓋了控制、模式識別、傳感技術(shù)、電子、電氣、計算機(jī)、機(jī)械等多個學(xué)科。本方案采用攝像頭作為信號采集的傳感器,根據(jù)攝像頭采集的圖像進(jìn)行精密計算,確定速度參考和舵機(jī)轉(zhuǎn)向參考。攝像頭組的智能車對于道路信息預(yù)測能力強(qiáng),而且攝像頭對道路的探測精細(xì),視角范圍大,因此受到眾多智能車設(shè)計者的歡迎。但攝像頭圖像受周圍光線的影響大;算法運(yùn)算量大,算法復(fù)雜,需要占用較多的MCU資源,因此其中圖像識別算法的設(shè)計成為系統(tǒng)設(shè)計的關(guān)鍵步驟[1]。
1 系統(tǒng)設(shè)計
智能車系統(tǒng)由核心處理器KINETIS60、路徑檢測模塊、起跑線檢測模塊、車速檢測模塊、電源模塊,無線數(shù)據(jù)傳輸模塊、電機(jī)驅(qū)動模塊、舵機(jī)驅(qū)動模塊組成[2]。其中攝像頭組的路徑檢測模塊由OV7620攝像頭實(shí)現(xiàn)。
車速檢測模塊由編碼器構(gòu)成,實(shí)現(xiàn)速度的實(shí)時采集。電機(jī)驅(qū)動模塊由八片IRF3205構(gòu)成H橋來實(shí)現(xiàn)。電源模塊由三塊LM2940組成。舵機(jī)使用S-D5連接至PWM引腳,起跑線檢測模塊由兩個TCRT5000以及一個LM339組成。無線數(shù)據(jù)傳輸通過NRF24L01進(jìn)行數(shù)據(jù)傳輸。
智能車由路徑傳感器采集得到前方道路的圖像,從中提取出有用信息,判斷所處的跑道類型(直道,大彎道,S彎道),確定小車的舵機(jī)轉(zhuǎn)向及車速。從而通過電機(jī)和舵機(jī)驅(qū)動小車流暢地在跑道上行進(jìn)。系統(tǒng)框圖如圖1所示。
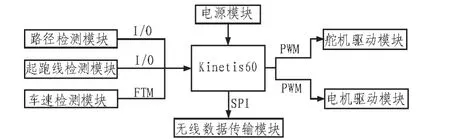
圖1 總體結(jié)構(gòu)框圖Fig. 1 Macro-diagram of the system
2 軟件算法總體設(shè)計
本方案中,以IAR 為開發(fā)工具,系統(tǒng)軟件設(shè)計包括以下幾個方面:系統(tǒng)初始化、視頻圖像信號采集、小車的方向(舵機(jī))控制和速度(電機(jī))控制[3-4]。系統(tǒng)軟件流程圖如圖2所示。
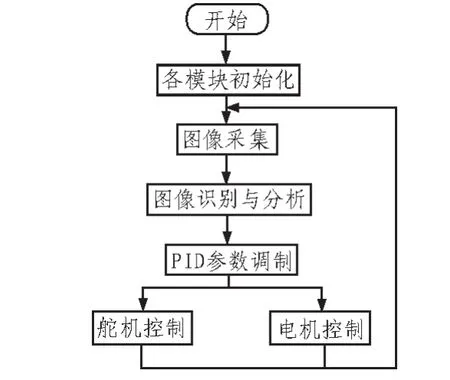
圖2 主程序流程圖Fig. 2 Flow chart of discrimination flow chart of main function
3 圖像采集
OV7620是CMOS彩色/黑白圖像傳感器。它支持連續(xù)和隔行兩種掃描方式,VGA與QVGA兩種圖像格式;最高像素為664×492;數(shù)據(jù)格式包括YUV、YCrCb、RGB3種,能夠滿足一般圖像采集系統(tǒng)的要求。
由于芯片處理能力不足以達(dá)到PC的運(yùn)算能力,因此本方案采用了黑白攝像頭,由于受片內(nèi)總線頻率的限制,每行能夠采集到的點(diǎn)數(shù)有限而且圖像質(zhì)量很差,并且會占用CPU大部分的時間,所以我們采用了K60自帶的DMA進(jìn)行數(shù)據(jù)采集,實(shí)踐證明,DMA能夠采集到絕大多數(shù)的點(diǎn),并且圖像質(zhì)量很好。
為了更好的檢測黑線中心位置,要保證單行上有足夠的點(diǎn),為了提高處理速度,可適當(dāng)降低采樣行數(shù),綜合了以上條件,最終決定采用100行信息進(jìn)行方向判斷,每幅圖像大小限定為180×100。
4 圖像識別
攝像頭智能車系統(tǒng)是否能辨識正確的方向的關(guān)鍵就是其中的圖像識別算法的設(shè)計,在本算法中根據(jù)采集來的圖像,首先進(jìn)行圖像二值化,然后再對二值化后的圖像進(jìn)行去噪處理,得到只含有賽道黑線的圖像,再對圖像進(jìn)行圖像識別,根據(jù)設(shè)定的閾值進(jìn)行方向識別,得到的結(jié)果送至舵機(jī)控制模塊進(jìn)行舵機(jī)的方向控制。基于圖像識別算法的路徑識別流程圖如圖3所示。
4.1 黑線提取
二值化是一種廣泛使用的圖像分割技術(shù),它利用了圖像中要提取的目標(biāo)物與其背景在灰度特性上的差異,把原圖像變?yōu)閮H用兩個灰度值表示的圖像目標(biāo)物和背景的二值圖像,考慮到所采集的圖像目標(biāo)物(黑色中心線)與背景(白色跑道)的灰度值差異比較明顯,采用固定閾值法進(jìn)行圖像的二值化。二值化的實(shí)現(xiàn)是由下面的公式來實(shí)現(xiàn):

式中g(shù)(x,y)為二值化結(jié)果;T為閾值,f(x,y)為原圖像的灰度值。

圖3 圖像識別算法流程圖Fig. 3 Flow chart of image recognition
本方案采用固定的閾值進(jìn)行圖像二值化,因為單片機(jī)沒有足夠的時間進(jìn)行動態(tài)閾值計算。因此要確定一個合理的算法來確定一個固定閾值[7-8],小車在不同光照條件下的圖像閾值不同,因此小車每一次啟動時計算一次固定閾值,如圖4所示。
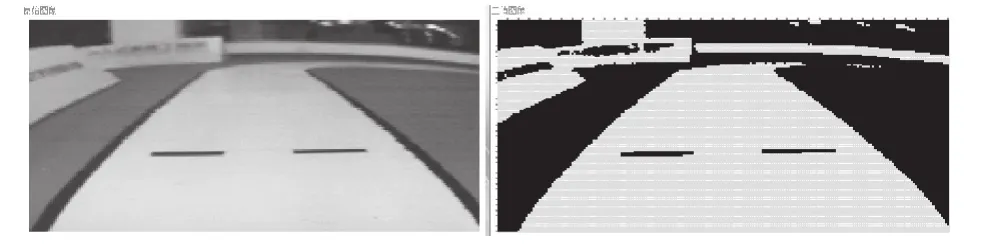
圖4 原始圖像及二值化結(jié)果Fig. 4 Original image and binarization results
4.2 舵機(jī)及電機(jī)控制算法
提取出圖像的中心線以后,需要根據(jù)中心線的位置,來判斷賽道的類型,區(qū)分直道、S型彎道和左轉(zhuǎn)彎和右轉(zhuǎn)彎。利用攝像頭識別道路在識別性能方面具有優(yōu)勢,相對于光電和電磁傳感器,可以有較遠(yuǎn)的前瞻距離,賽道信息不是根據(jù)單行數(shù)據(jù)來判斷,而是根據(jù)每幅圖像的多行信息來判斷。根據(jù)前述,每幅圖像采用80行的信息進(jìn)行判斷。
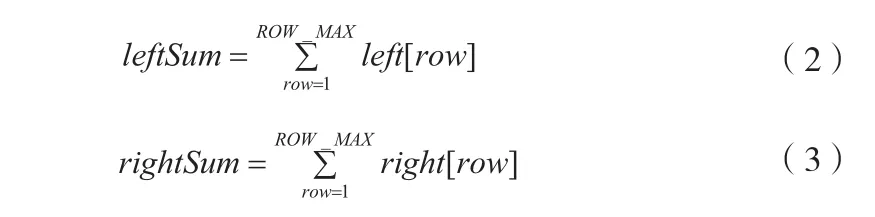
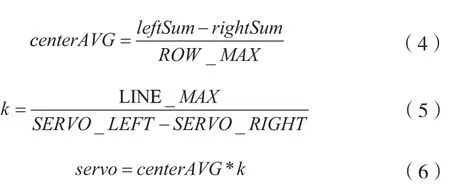
根據(jù)二值化圖像的結(jié)果,以圖像重心為界,分別計算邊界左右側(cè)白點(diǎn)數(shù)目和(式2、式3),然后對左右側(cè)白點(diǎn)數(shù)和leftSum,rightSum做差,然后對差值除以行數(shù),得到賽道偏移量(式4),根據(jù)偏移量centerAVG大小,centerAVG的大小基本上可以判斷當(dāng)前賽道情況,根據(jù)賽道情況,對centerAVG乘以不同的系數(shù)k(式5),得到舵機(jī)值(式6),然后進(jìn)行方向控制。
5 結(jié) 論
文中提出一種基于攝像頭的智能循跡車的設(shè)計及實(shí)現(xiàn)方法,處理簡單,占用MCU資源少,執(zhí)行效率高。文中提到的算法在具有本文特征的其他賽道上也可以使用。通過多次實(shí)踐,算法正確識別率達(dá)93%以上,在實(shí)際的大學(xué)智能車競賽中被多次采用,并取得優(yōu)異成績。但攝像頭的高度和角度還需要進(jìn)一步的試驗、調(diào)整以得到更好的圖像采集效果,算法仍需進(jìn)一步優(yōu)化,以提高系統(tǒng)的穩(wěn)定性。
[1] Morita T,Satonobu J.An approach to the intelligent vehicle [J].IEEE Intelligent Vehicles Symposium,1993:426-432.
[2] Milan Sonka,Vaclav Hlavac, Roger Boyle.Image Processing,Analysis, and Machine Vision, Second Edition[M].Thomson Learning and PT Press,1999.
[3] Banks S.Signal Processing, Image Processing and Pattern Recognition[M].Englewood Cliffs, NJ: Prentice Hall,1996.
[4] 王曉明.電動機(jī)的單片機(jī)控制[M].北京:北京航空航天大學(xué)出版社, 2002
[5] 邵貝貝. 單片機(jī)嵌入式應(yīng)用的在線開發(fā)方法[M].北京:清華大學(xué)出版社,2004
[6] 張化光,何希勤.模糊自適應(yīng)理論及應(yīng)用[M].北京:北京航空航天大學(xué)出版社,2002.
[7] 劉紅莉,王國宇,馬原.基于水下圖像小波變換的圖像閾值去噪方法的研究[J].現(xiàn)代電子技術(shù),2011(15):79-81.LIU Hong-li,WANG Guo-yu,MA Yuan.Study on image threshold de-noising based underwater image wavelet transform[J].Modern Electronics Technique,2011(15):79-81.
[8]雷建鋒,汪偉.基于OpenCV的圖像閾值分割研究與實(shí)現(xiàn)[J].現(xiàn)代電子技術(shù),2013(24):73-76.LEI Jian-feng,WANG Wei,Research and implementation of image threshold segmentation based on OpenCV[J].Modern Electronics Technique,2013(24):73-76.
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學(xué)科學(xué)(學(xué)生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(shù)(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44