基于CANopen的輕軌牽引變流器網絡控制系統
2014-01-16 05:58:04梁東升
電子設計工程 2014年15期
關鍵詞:設計
梁東升,方 曉
(廣州地鐵運營事業總部基地 廣東 廣州 510010)
目前,輕軌運輸系統以其舒適、安全、低能耗、承載人數多等特點受到人們的青睞,成為市內交通的主要運輸形式,國內許多城市均展開輕軌的建設,其中牽引變流裝置負責為輕軌車輛提供動力并對電機運行情況進行監測,是輕軌建設過程中的核心裝置,直接影響著車輛運行的穩定性和安全性。網絡控制系統將車輛中不同位置的牽引變流器通過網絡線纜連接起來,形成一個信息交互網絡,完成牽引變流器的運行數據通信和監測。而輕軌車輛的高可靠性需求對牽引變流器及其控制網絡提出較高的要求[1-3]。
針對輕軌車輛牽引變流器的控制需求,文中采用CANopen作為牽引變流器的控制網絡,充分發揮CANopen可靠靈活、實時性強的特點,設計了滿足輕軌車輛運行高需求的牽引變流器網絡控制系統[4-5]。
1 輕軌牽引變流器簡介
牽引變流器結構如圖1所示,負責為和牽引控制單元組成,牽引變流器控制電機出力,為車輛提供牽引動力。每個牽引變流器均有一個牽引控制單元對變流器及電機運行狀態進行監測和控制,實現變流器數字量和模擬量的采集和通信,完成車輛制動控制以及車載設備的保護和故障檢測。
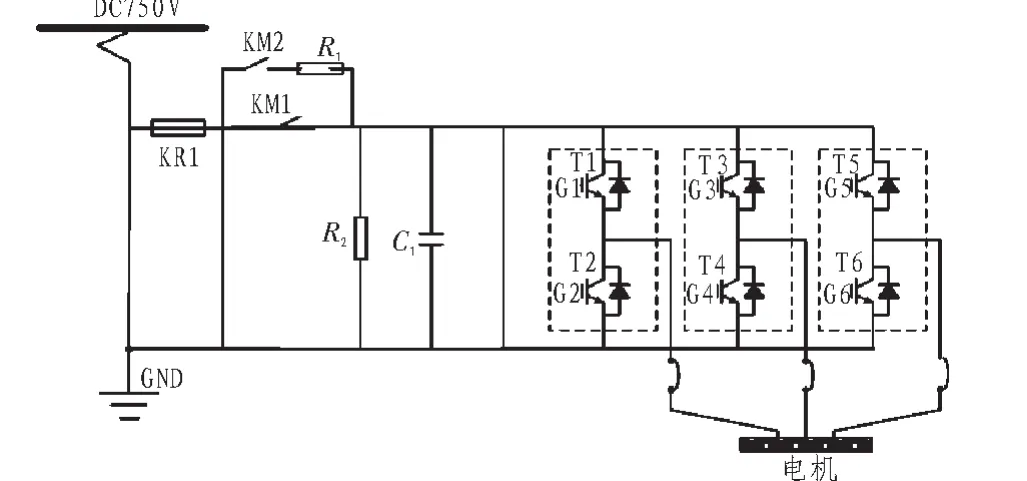
圖1 輕軌牽引變流器結構圖Fig.1 Converter structure of rail traction
2 CANopen協議概述
CAN(Controller Area Network)是一種支持分布式控制的總線式通信網絡。CANopen協議是基于CAN總線的應用層協議,在機械制造、鐵路、車輛、船舶、制藥、食品加工等領域已得到廣泛應用。
CANopen協議的通信依賴于4種通信對象,分別是負責網絡啟動和管理的網絡管理對象NMT;進行對象字典訪問的服務服務數據對象SDO;實時數據傳輸的過程數據對象PDO以及特殊功能/預定義連接集對象。
在CANopen協議規范中,通過設備模型對不同功能的設備進行描述達到統一觀察和設計目的。設備模型如圖2所示,由通信單元、對象字典及應用單元組成。

圖2 CANopen設備模型Fig.2 Device model of CANopen
其中,對象字典是CANopen協議的核心,集合了設備的所有數據結構。在CANopen網絡系統中每個節點都有惟一的對象字典,且結構基本相同,內容依據設備而定,包含描述這個設備網絡行為及其應用對象的所有參數。對象字典是預先確定的,通過訪問對象字典可以得到各節點的狀態,確定網絡的通信模式[6-7]。
3 CANopen網絡控制系統設計
3.1 方案設計
CANopen網絡控制系統主要針對牽引控制單元之間的通信而設計。在CANopen網絡中,為了便于整個網絡的管理,采用主從式的網絡結構,系統中存在一個主節點和多個從節點,網絡控制系統架構如圖3所示。主節點通過協議中的NMT對象實現網絡管理,如系統初始化、網絡配置、啟動和停止從節點,偵測失效節點等功能,從而可對所有從節點的工作狀態進行管理及監控。從節點負責將各節車輛的牽引運行數據傳輸到主節點,實現數據的通信和管理。
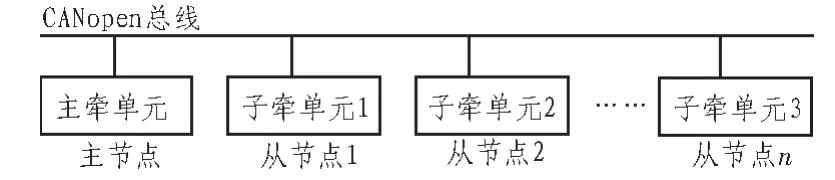
圖3 CANopen網絡控制系統架構Fig.3 Control system architecture of CANopen network
在本文中,網絡控制系統的設計以6節列車車廂編組為研究對象,由3個車輛單元構成,每個單元包括一節動車和一節拖車,每節動車安裝有牽引變流器。在車頭動車中設置牽引主控單元做為整個網絡的主節點,構成一個一主三從的CANopen網絡控制系統。
3.2 對象字典建立
根據CANopen協議規定,網絡中每個設備節點均需設計一個對象字典對其參數進行描述并完成相應的功能[8]。針對3.1中設計的一主三從的網絡結構,需要為主節點和各從節點分別設計對象字典。根據對象字典的通用結構和建立規則,各節點之間的數據通信主要以PDO和SDO方式進行。主節點對3個從節點進行管理,所以配置3個SDO服務數據對象,分別完成對應從節點的參數配置,同時主節點在網絡工作過程中要完成過程數據的接收和發送,所以配置一個過程數據對象PDO。主節點對象字典設計如表1所示。

表1 主節點對象字典Tab.1 Object dictionary of master node
各從節點需要配置一個過程數據對象PDO和一個服務數據對象SDO來響應主節點的管理并完成通信功能。各從節點功能相同,所以具有相同的對象字典如表2所示。

表2 從節點對象字典Tab.2 Object dictionary of slave node
CANopen網絡對象字典的建立有助于更好的進行軟件設計和試驗調試。在組網過程中,建立好的對象字典將寫成EDS文件的格式導入到主節點配置軟件,便于主節點通過對象字典配置所有節點的參數。
3.3 通信協議制定
CANopen網絡按照對象字典中定義的參數進行數據的收發通信。在收發過程中,數據需按照一定的規則進行,這個規則就是通信協議。本文針對輕軌車輛牽引控制單元之間的通信,主要是主牽引控制單元和各子牽引單元之間的信息交互,包括主牽引單元向子牽引單元發送以及子牽引單元向主牽引單元發送數據每個方面。這兩方面都需要設計相應的通信協議規定數據的具體交互形式,包括數據名稱、數據格式、數據描述等內容。表3和表4分別列舉了牽引單元部分數據的通信協議是針對這兩個方面設計的通信協議。
從上表的通信協議中可以看到,主牽單元向子牽單元傳輸的數據主要是控制參數,用于對電機進行矢量控制。子牽單元向主牽單元傳輸的數據主要是車輛設備的運行監測參數,實時反映車輛、變流器、電機等設備的運行情況。
3.4 網絡調度設計
在CANopen網絡中,數據通信采用載波監聽多路訪問/沖突檢測 (Carrier Sense Multiple Access/Collision Derect,CSMA/CD)和優先級仲裁 (Arbitration on Message Priority,AMP)相結合的媒體訪問機制。網絡中的各設備節點通過標識符優先級的高低競爭網絡信道的使用權。因此,CANopen網絡需要設計一種滿足需求的優先級編寫規則,合理分配各種信息的優先級,保證網絡調度的可行性。CANopen網絡中常用的調度方式是固定優先級調度,本文同樣采用該調度方式對信息的優先級進行設計[9-10]。
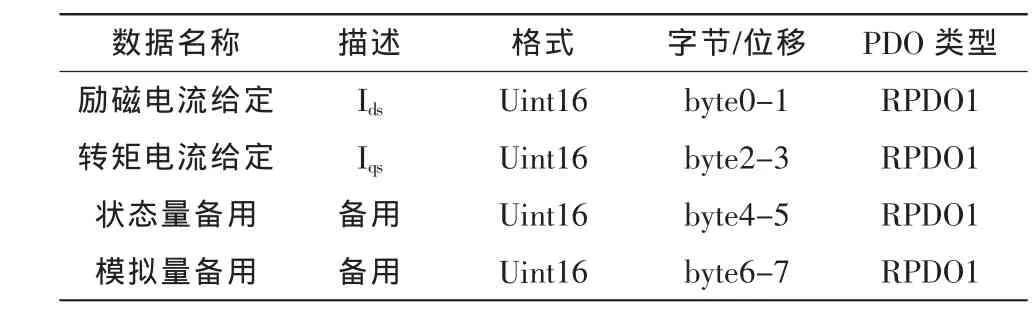
表3 主牽單元向子牽單元數據通信協議Tab.3 Data communication protocol from lord-led unit to sub-led unit
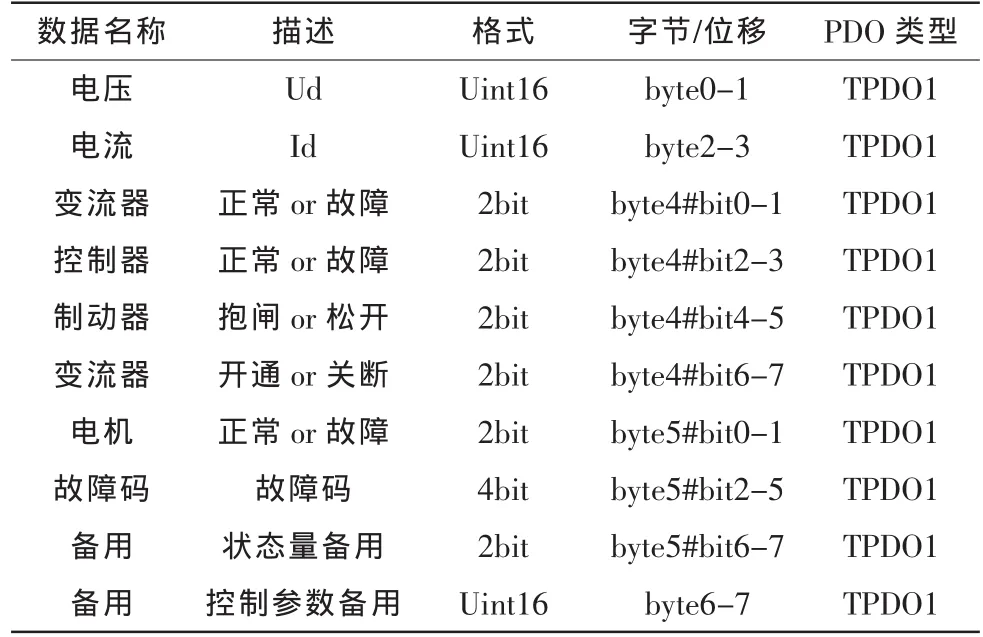
表4 子牽單元向主牽單元數據通信協議Tab.4 Data communication protocol from sub-led unit to lord-led unit
CANopen網絡中優先級的高低取決于數據對象的標識符,標識符越小優先級越高。本文中CANopen數據采用標準幀,幀格式如圖4所示。
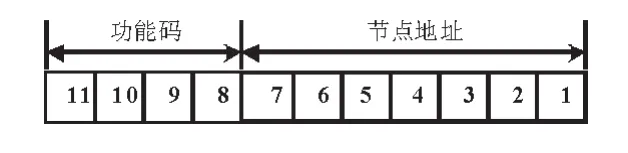
圖4 CANopen標準幀結構Fig.4 The standard frame structure of CANopen
由圖4可知,標準幀格式下,每個通訊對象由11位標識符組成,其中高4位的功能碼定義通信對象的功能,低7位表示網絡中設備的節點號,即節點地址ID。對于一個網絡控制系統,網絡中設備的節點ID是確定的,所以重點對高4位的功能碼進行設計。根據傳輸數據的類型和功能特點,將牽引變流器運行數據分為事件控制數據、運行控制數據及運行監測數據3類,設計如圖5所示的不同信息功能碼結構,其中事件控制數據緊急情況下產生,具有最高的實時性要求,通過設置功能碼最高位為0實現;運行控制數據和監測數據均屬于周期性產生、傳輸的數據,但運行控制數據用于傳輸網絡控制信息,實時性要高于運行監測數據。所以,首先通過功能碼最高位設置為1使該兩種數據的優先級低于事件控制數據。其次,設置次高位分別為0和1來保證同等競爭條件下,運行控制數據的優先級高于運行監測數據,從而滿足不同的實時性需求。
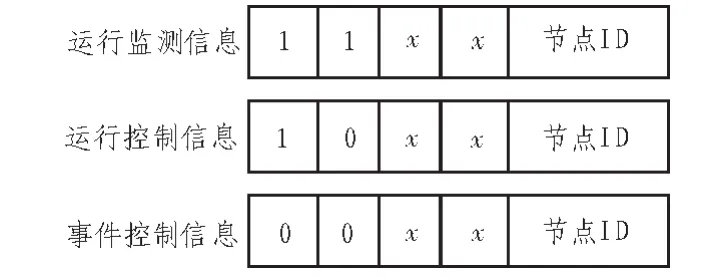
圖5 CANopen通信對象功能碼結構設計Fig.5 The function code structure design of communication object of CANopen
3.5 CANopen通信程序設計
CANopen網絡控制的通信程序設計流程如圖3.16所示。首先進行主節點CANopen接口配置。選擇波特率,完成CANopen板卡的初始化,將從節點添加為網絡節點。在系統中將各從節點配置成節點監測狀態,主節點通過檢測從節點發送的周期性心跳報文(Heartbeat)來判斷各從節點的工作狀態。首先上電后,當從節點處于Pre—operational狀態時,可以接收主節點發送來的SDO報文進行對象字典的配置,操作完畢向主節點發送發送Boot—up報文,通知主節點已進入Pre—operational狀態。然后繼續等待,當接收到主節點的NMT報文后進入Operational狀態,此時主、從節點可以通過PDO報文進行實時數據信息交互,主節點也可以發送NMT報文改變從節點的工作狀態。按照以上流程進行通信實驗,至此本設計實現了基于CANopen協議的監控單元主控系統間的網絡控制。
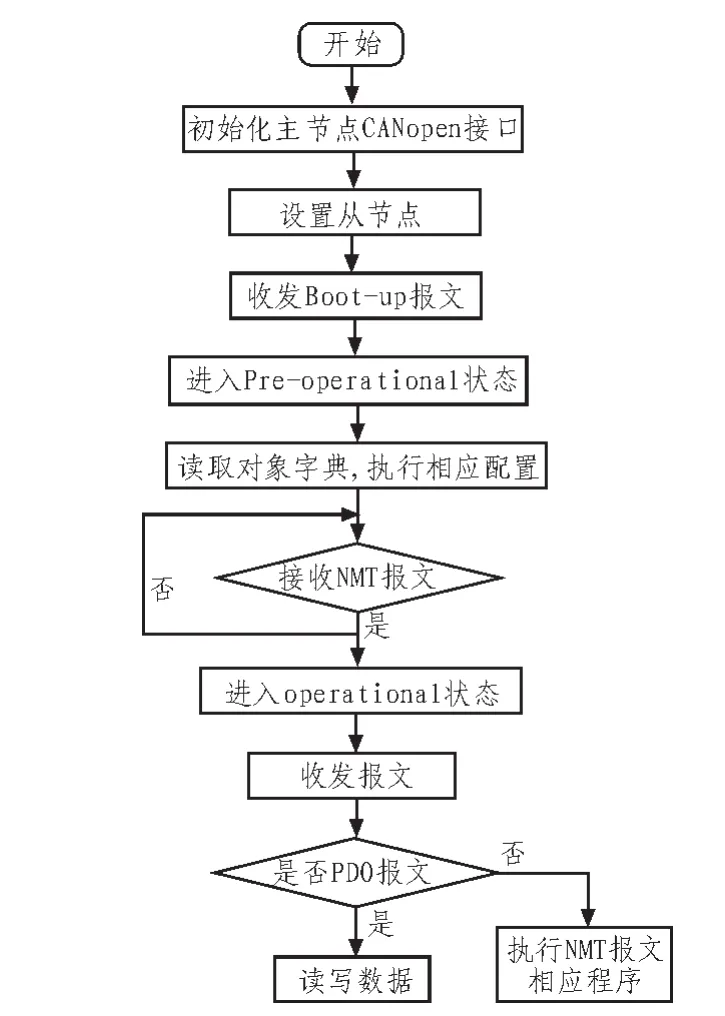
圖6 CANopen通信程序流程圖Fig.6 The communication program flowchart of CANopen
4 實驗驗證
為了進一步驗證本文設計的CANopen網絡控制系統的可行性及其通信的正確性,對CANopen網絡控制系統進行了組網測試。測試中主節點采用Selectron可編程控制器PLC模塊CPU727,從節點采用DSP28335控制板。主節點PLC配套軟件CAP1131集成了CANopen組網工具,對網絡節點、PDO對象參數、SDO對象參數、節點保護參數等網絡通信關鍵內容進行配置,之后便可進行整個網絡的組網實驗。在試驗中,采用CAN分析儀對主節點及各從節點運行數據進行監測,監測結果如圖7所示。從圖中可以清晰看到CANopen網絡中傳輸數據的內容。通過對比圖中各從節點和主節點的監測數據,可充分說明整個網絡通信的正確性[11]。
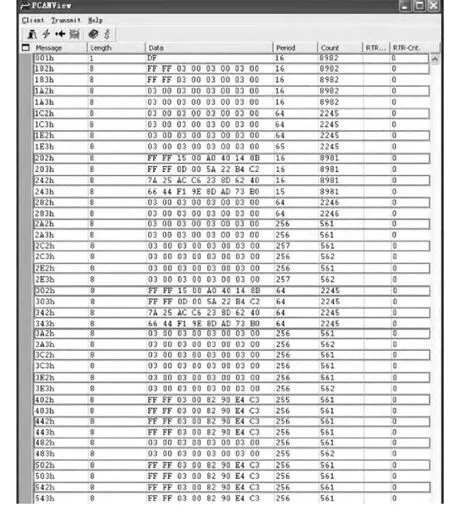
圖7 CAN分析儀監測數據Fig.7 Monitoring data of CAN-analyzer
5 結束語
文中針對輕軌牽引變流器中運行數據的傳輸和控制,設計了基于CANopen協議的網絡控制系統,通過實際的調試以及對通信數據的監測,驗證了該網絡控制系統可充分發揮其實時可靠的運行特點,滿足輕軌牽引變流器的數據傳輸需求。隨著CANopen技術的不斷完善,基于CANopen的網絡控制系統在輕軌牽引領域將有著更為廣闊的應用前景。
[1]路向陽.我國列車通信網絡的發展與應用 [J].機車電傳動,2001(6):1-5.LU Xiang-yang.The development and application of TCN in China[J].Electrical Drive for Locomotives,2001(6):1-5.
[2]范曉云.廣州輕軌三號線車輛3節與6節編組的列車控制分析[J].電力機車與城軌車輛,2007,30(6):14-18.FAN Xiao-yun.Train control analysis of 3-cars train and 6-cars coupled train for Guangzhou Metro Line 3[J].Electric Locomotires&Mass Transit Vehicles,2007,30(6):14-18.
[3]張元林.列車控制網絡技術的現狀與發展趨勢[J].電力機車與城軌車輛,2006,29(4):1-4,26.ZHANG Yuan-lin.Actuality and development trend of train control network technology[J].Electric Locomotives and Mass Transit Vehicles,2006,29(4):1-4,26.
[4]Kirrmann H D,Claessen U.IEC列車通信網絡[J].機車電傳動,1999(3):4-9.Kirrmann H D,Claessen U.The IEC train communication network[J].Electric Derive For Locomotive,1999(3):4-9.
[5]王奇,劉志剛,彭權威,等.基于CANopen的列車通信網絡實現研究[J].電氣應用,2009(7):74-77.WANG Qi,LIU Zhi-gang,PENG quan-wei,et al.The research and realization of train communication based on CANopen[J].Electrotechnical Application,2009(7):74-77.
[6]陳在平,王峰.基于CANopen協議從節點研究[J].制造業自動化,2010,32(2):27-30.CHEN Zai-ping,WANG Feng.The research of structural analysis and slave node based on CANopen[J].Manufacturing Automation,2010,32(2):27-30.
[7]宋佳景,劉志剛.基于CANopen列車通信網絡的地鐵門控系統設計[J].機電工程技術,2008,37(8):25-29.SONG Jia-jing,LIU Zhi-gang.Design of metro door control system based on CANopen train communication network[J].Mechanical and Electrical Engineering Technology,2008,37(8):25-29.
[8]CiA.DS301.CANopen Application Layer and Communication Profile[S].Guangzhou:Zhou ligong,2002.
[9]邱占芳,張慶靈,楊春雨.網絡控制系統分析與控制[M].北京:科學出版社,2009.
[10]Farsi M,Karl Ratcliff.An introduction to CANopen and CANopen communication issues[J].The Institution of Electrical Engineers,2002.
[11]關守平,周瑋,尤富強.網絡控制系統與應用[M].北京:電子工業出版社,2008.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
