基于單片機(jī)系統(tǒng)的無線探月機(jī)器車
2014-01-21 06:53:46杜欣宇
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新 2014年5期
高 源,杜欣宇,趙 凱,梁 雪
(北京電子科技職業(yè)學(xué)院 自動化工程學(xué)院,北京)
0 引言
現(xiàn)在,隨著科技的快速發(fā)展,國內(nèi)外對小型智能系統(tǒng)的引用越來越廣泛,種類也越來越多。本題目就是結(jié)合有關(guān)項目而確定的開發(fā)類課題,所設(shè)計的智能車能融單片機(jī)、RAM、多種傳感器、直流電機(jī),基于接口電路板,構(gòu)建出融多種控制器于一體的控制系統(tǒng);再通過軟件編程與系統(tǒng)集成使得系統(tǒng)的各項功能得以實現(xiàn)和保障。
1 總體架構(gòu)設(shè)計
AT89S52 單片機(jī)作為總的控制核心,利用傳感器,在循線信號、檢測障礙物信號等的輸入作用下,控制電機(jī)采取相應(yīng)的動作,從而調(diào)整小車做合適的選擇。同時,將之轉(zhuǎn)化為文字信息,通過LED 顯示。該系統(tǒng)主要由循跡、避障、數(shù)碼顯示、電機(jī)驅(qū)動、電源、單片機(jī)控制等六大模塊組成。如圖1 所示。
2 硬件設(shè)計
2.1 控制器與任務(wù)模塊
如圖2 所示,在本設(shè)計中采用AT89S52 單片機(jī)作為控制核心,它是一種低功耗、高性價比的CMOS8 位微控制器。具有8K 可編程Flash 存儲器,與MCS-51 單片機(jī)產(chǎn)品兼容,有32 個可編程I/O 接口,八個中斷源,具有低功耗空閑和掉電模式,并且掉電后中斷可喚醒,價格低廉,使用簡便。
單片機(jī)需使用11.0592Mhz 的晶振。硬件連接: LCM數(shù)據(jù)口對應(yīng)接P0 (BD0~BD7-P2.0~P2.7),LCM 控制RSP3.5,RW-P3.6,E-P3.7,I2C 總 線: SDA-P1.4,SCLP1.5。電機(jī)驅(qū)動器L298N 是ST 公司生產(chǎn)的一種高電壓、大電流電機(jī)驅(qū)動芯片。該芯片采用15 腳封裝。它可以驅(qū)動一臺兩相步進(jìn)電機(jī)或四項步進(jìn)電機(jī),也可以驅(qū)動兩臺直流電機(jī)。主要特點是: 工作電壓高,最高工作電壓可達(dá)46V;輸出電流大,瞬間峰值電流可達(dá)3A,持續(xù)工作電流為2A;額定功率25W。
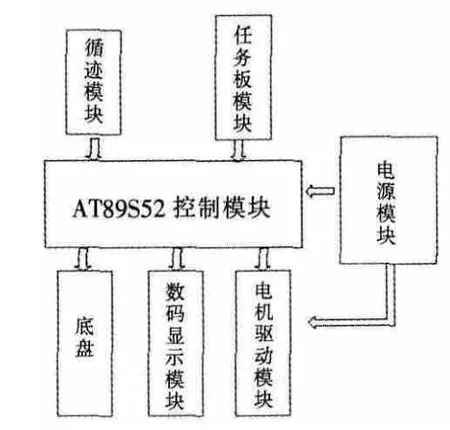
圖1 總體架構(gòu)設(shè)計圖
圖2 無線探月機(jī)器車樣車圖
采用1 塊充電鋰電池為直流電機(jī)供電,將12V 電壓降壓、穩(wěn)壓后給單片機(jī)系統(tǒng)和其他芯片供電。充電電池具有較強(qiáng)的電流驅(qū)動能力以及穩(wěn)定的電壓輸出性能。雖然充電電池的體積過于龐大,但由于我們的車體設(shè)計時留出了足夠的空間,并且充電電池的價格比較低。故采用充電鋰電池。底盤作用是支承、安裝小車電機(jī)及其各部件、總成,成形汽車的整體造型,并接受發(fā)動機(jī)的動力,使汽車產(chǎn)生運動,保證正常運動。
任務(wù)板主要有兩個功能,一個是超聲波測距,另一個帶I2C 總線的LM75 測溫。AT89S52 單片機(jī)主要完成功能是超聲波測距,并把數(shù)據(jù)掛到I2C 總線上,程序已下載到單片機(jī)中可以直接接上LCD1602 即可使用。測溫部分采用ST 公司的STLM75 器件,它是一種含9 位ADC、溫度分辨率高達(dá)0.5℃的數(shù)字溫度傳感器,測量范圍-55℃~125℃。它提供兩條線支持I2C 總線協(xié)議的接口來監(jiān)測溫度,并具備自校準(zhǔn)功能。上位機(jī)以隨時要求STLM75 去讀取溫度,當(dāng)溫度超過設(shè)定的溫度時,芯片系統(tǒng)會自動輸出一個超溫報警信號,可用于上位機(jī)的監(jiān)控操作。主機(jī)可以通過程序來控制溫度警報器及溫度,A0、A1、A3 三引腳可以設(shè)定地址,其自帶的I2C 總線,掛在了同一總線上,可以通過ARM2440 開發(fā)板上的I2C功能接到任務(wù)板上I2C 接口上即可對任務(wù)板上超聲波數(shù)據(jù)和溫度數(shù)據(jù)讀回。
2.2 功能模塊
尋跡模塊主要是由紅外發(fā)生接收器探頭來完成的,利用白色與黑色的反光特性的差異,最終達(dá)到尋跡的功能。其工作原理是: 紅外發(fā)光二極管發(fā)射紅外線,經(jīng)過路面反射后,光敏管接收紅外線。如果是白紙,紅外線反射后則光敏電阻大幅降低,ST178 輸出端產(chǎn)生一個低電平,經(jīng)電壓比較器LM324 比較后,將低電平信號送至單片機(jī)。若遇到黑線,紅外線不能反射進(jìn)入光敏管,從比較器輸出高腳的輸出電平信號組合來設(shè)定L293D 控制端的高低電平,實現(xiàn)使電機(jī)正反電平送入單片機(jī)。該模塊有八個紅外對管,通過調(diào)節(jié)對應(yīng)對管的電位器來調(diào)節(jié)對管的靈敏度,通過不同的返回值來判斷探月車的所在位置。
如果要直觀了解探測車所獲得的信息,數(shù)碼顯示模塊的應(yīng)用也是重要的一環(huán)。在此模塊中,采用1602 液晶顯示屏,1602 液晶屏是一種專門用來顯示字母、數(shù)字、符號等的點陣型液晶模塊。它由若干個5X7 或者5X11 等點陣字符位組成,每個點陣字符位都可以顯示一個字符,每位之間有一個點距的間隔,每行之間也有間隔,起到了字符間距和行間距的作用,由于表達(dá)信息主要表達(dá)形式不需要圖形等復(fù)雜形式,所以1602 可以很好地發(fā)揮在此處的用處。再有,1602LCD 是指顯示的內(nèi)容為16X2,即可以顯示兩行,每行16 個字符液晶模塊 (顯示字符和數(shù)字)。
3 編程實現(xiàn)
勘探機(jī)器人的軟件部分主要包括操控軟件設(shè)計。操控軟件是針對勘探機(jī)器人而設(shè)計的上位機(jī)操控軟件,軟件包括了控制部分和顯示界面。上位機(jī)操控軟件以PC為平臺,軟件界面清晰簡易(如圖3 所示)。
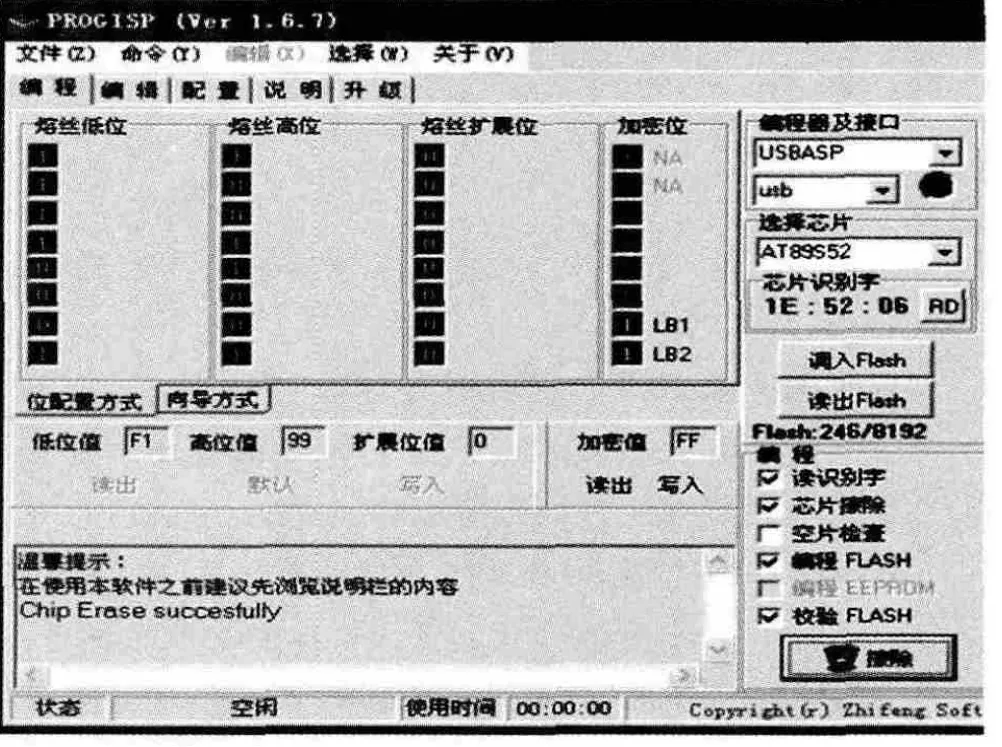
圖3 人機(jī)交互界面
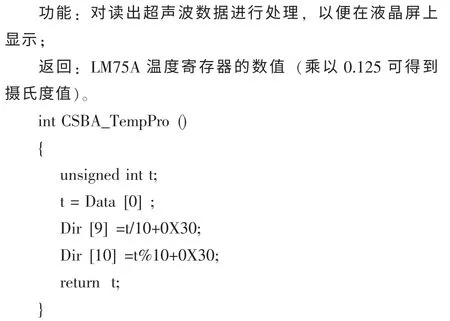
編程部分程序如下:
4 結(jié)束語
此方案選擇的器件比較簡單,實際中也很容易實現(xiàn)。經(jīng)過多次測試,結(jié)果表明在一定的弧度范圍內(nèi),小車能夠沿著黑線軌跡行進(jìn),達(dá)到了預(yù)期目標(biāo)。勘探機(jī)器人的開發(fā),使得一些危險、人類無法正常完成的活動得以實現(xiàn),提高了工作效率的同時,穩(wěn)定性和準(zhǔn)確度也得到了提高。
[1] 何利民.單片機(jī)高級教程——應(yīng)用與設(shè)計[M].北京:北京航空航天大學(xué)出版社,1999.
[2] 呂泉.現(xiàn)代傳感器原理及應(yīng)用[M].北京:清華大學(xué)出版社,2006.
[3] 張拓,戴亞文.基于AT89S52 單片機(jī)的智能循跡機(jī)器人設(shè)計[J]. 機(jī)電工程基礎(chǔ),2009,3.
[4] 劉波.單片機(jī)與液晶控制器的接口設(shè)計[J].機(jī)械工程 與自動化,2006,4.
[5] 李廣弟.單片機(jī)基礎(chǔ)[M].北京航空航天大學(xué)出版社,2001.
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:48:04
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:27
