原子干涉儀中激光頻率和光強控制系統的設計
2014-01-23 02:40:36胡朝暉
激光與紅外 2014年6期
關鍵詞:系統
胡朝暉,楊 婷,亓 魯
(1.北京航空航天大學慣性技術重點實驗室,北京100191;2.北京航空航天大學新型慣性儀表與導航系統技術國防重點學科實驗室,北京100191)
1 引言
由于和中子、光子一樣具有波粒二象性,原子可以實現類似光學干涉儀的原子干涉儀。原子干涉儀是用一冷原子束以兩個不同的拓撲路徑傳播,構成類似光學Mach-Zehnder型干涉儀,測量由于兩原子束通過不同路徑引起的相位差。1991年由斯坦福大學Steven Chu等人首次實現脈沖式原子干涉儀以來,原子干涉儀在牛頓引力常數、角速度測量等領域就以其超高的理論靈敏度得到了廣泛高度關注,并在近幾年得到迅猛發展。2000年,耶魯大學T.L.Guatavson等人采用相向傳播的兩束原子進行角速度測量;2006年,法國B.Canuel等人利用冷原子團對拋研制了6軸慣性敏感器,實現多個慣性參數的測量。
原子干涉儀中一個重要部分是激光冷卻原子,其基本原理為:行進中的原子被相向的激光照射,激光頻率和原子振頻一致,原子就會吸收迎面而來的光子受激躍遷到高能態,因而動量減小。原子處在高能態后又會向各個方向發射光子,因此,原子的動量減小,速度減小。其中,原子所處的態取決于以下參數:激光能量、相互作用時間和激光頻率。另外在相互作用后,不同能級上的原子數目取決于激光相位。另外一個基礎是激光操控原子,即用一定的激光光束照射原子,使得原子團發生分裂、偏轉、匯合。綜上所述,激光對于原子干涉儀非常重要。
對于激光的控制,主要包括對頻率、相位及光強的控制。本文設計的系統主要是實現激光移頻、光強穩定及調制的功能。
對于激光移頻,目前廣泛使用電光調制器和聲光調制器等移頻器件實現,方法主要有鎖相環技術和直接頻率合成技術兩大類[1-2]。鎖相環技術相位噪聲低,雜散小,在頻率分辨力要求不高及設計成本方面考慮,在本系統中采用鎖相環進行移頻。對于激光光強控制,一般方法采用兩個AOM[3],一個穩定激光光強,一個光強調制。但是這種系統中器件排布必須滿足一定光程,造成光學布局龐大。另外一種方法是使用一個聲光調制器[4],這種方法對于第一種方法光程短、易調節,更方便使用。
根據原子干涉儀對激光的要求,研究原子能級躍遷量化參數和干涉儀工作過程及原理,基于聲光調制器[5-10]設計了一套激光頻率和光強控制系統,該系統實現的功能有激光移頻、光強穩定和調制,同時還可以實現光束通斷的控制。為了提高系統中鎖相環路的性能,設計了集成鎖相頻率合成器。實驗證明,設計的激光頻率和光強控制系統能夠實現各個預期功能,并具有穩定性好、速度快等優點。
2 激光頻率和光強控制系統的理論分析
2.1 原子能級及原子干涉儀原理
原子干涉儀中原子的能級結構決定了激光的主要參數,因此首先分析原子特性。
系統中選用133Cs原子,其基態的主量子數n=6,軌道角動量量子數l=0,用62S1/2表示,其中S表示l=0,上角標“2”表示該態為一個雙重態,下角標“1/2”為總角動量量子數。兩個最低激發態是62P1/2、62P3/2(P表示l=1)。從基態到這兩個激發態的躍遷分別稱作D1線和D2線。我們采用D2線作為基準激光的頻率,其能級結構如圖1所示。
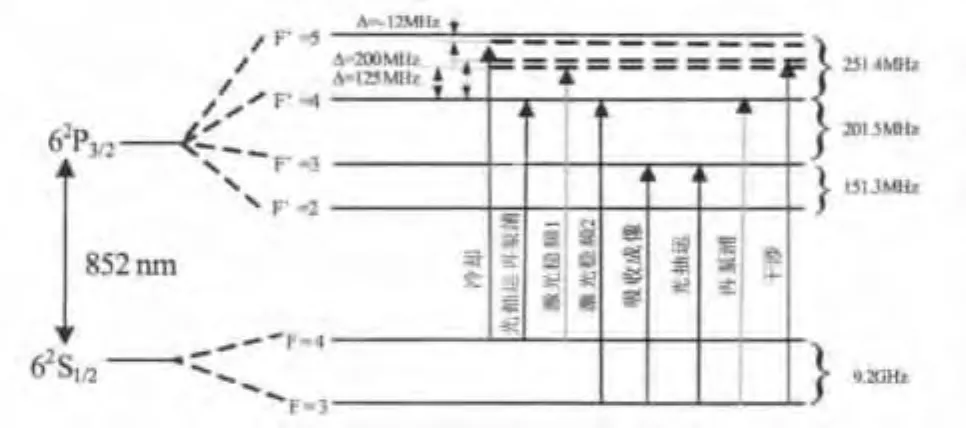
圖1 133Cs原子D2線能級結構示意圖
D2線對應的基態62S1/2有兩個超精細能級F=3和F=4,分別對應不同的原子自旋態,這里F=I+J代表原子體系總角動量量子數,I表示核自旋角動量量子數,J表示價電子總角動量量子數。每一條超精細能級在磁場作用下被分成(2F+1)條塞曼子能級〉。 因 為和對磁場不敏感,因此在原子干涉實驗中作為基準能級。
62P3/2激發態包含 4 級:F'=2,F'=3,F'=4,F'=5,這些能級是準備到達的激發態。當與角動量選擇規則結合時,會形成閉環循環躍遷,進而更加有效地冷卻和捕獲原子。
從基態F=4躍遷到激發態F'=5的頻率作為冷卻133Cs原子的冷卻光,而為了使該光束能更準確的與原子作用,需要光束的頻率有一定的偏移,如圖1中Δ標識的偏移。根據選擇定則,在此過程中處在激發態的原子有一定概率自發輻射落到基態F=3上,這樣冷卻光無法與該基態的原子繼續發生作用,無法完成循環躍遷,因此需要同時提供再泵浦光,將落在F=3的原子激發到激發態上,使得原子進入循環躍遷中。
原子干涉儀在將原子冷卻捕獲之后,要利用磁導引技術將冷原子團裝載導引完成后進行干涉。裝載磁導引過程中,光抽運的冷卻光、再泵浦光和冷卻捕獲過程中冷卻光、再泵浦光的原理類似,躍遷過程如圖1中所示,分別是從F=3躍遷到F'=3,從F=4躍遷到F'=4上。
當冷原子制備成功后,下一步進行原子干涉。本系統采用原子Talbot-Lau效應,利用兩束相向的激光束形成駐波場。原子團首次經過駐波場之后分成相干子波,再次經過時,這些子波產生干涉,并在一定的Talbot距離處自成像,獲得干涉條紋。再利用布拉格背向散射檢測等方法[9-14]檢測幅值和相位信息。
由此可見,在原子干涉儀中需要多種頻率的激光,為此需在一個或兩個激光器基礎上,通過移頻實現。本系統中選用兩個激光器,其頻率分別為圖1中的激光穩頻1和激光穩頻2。從F=4和F=3躍遷的頻率分別由激光穩頻1和激光穩頻2產生。激光穩頻1所需的移頻值是114 MHz和125 MHz,激光穩頻2所需的移頻值是200 MHz和201.5 MHz。所以整個系統中移頻器件所需調節范圍是114~201.5 MHz。除移頻之外,系統還要求移頻的穩定性、再泵浦等光束光強的穩定性和可調節性、磁光阱和駐波脈沖等階段激光的快速通斷等功能。為此本文所設計的激光頻率和光強控制系統需實現上述功能,并滿足上述移頻等指標。
2.2 聲光調制器頻率和光強控制原理
在對激光進行調節和控制的器件中,聲光調制器(AOM)是廣泛使用的器件之一。由于AOM具驅動功率小、熱穩定性高及易于控制,使其在原子光學領域被廣泛采用。
當波長為λ的一束激光以布拉格角θB入射到AOM上并且AOM自身產生的超聲波波長Λ和介質中聲光作用長度L滿足:

就會發生布拉格衍射,從而實現對入射光頻率、方向和振幅的調制。式中,Q為聲光失配度;n為介質的折射率。
θB以及入射光與衍射光的0級光、1級光和超聲波的頻率 fi,f0,f1,fs滿足下式:

由此可見,AOM可通過超聲波的頻率對入射光的頻率進行調制,形成1級衍射光的頻率。通過具體量化每一束激光的移頻數值,控制AOM電壓產生的超聲波頻率實現激光頻率變化。
設入射光束的強度為I,則1級光的強度I1為:
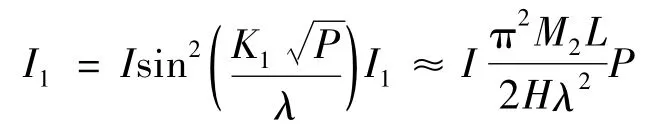
其中,M2為聲光優值;L,H分別是換能器的長度和寬度;P為介質中超聲波的功率;K1為常數。又因超聲波的功率與施加在換能器上的電壓V的平方成正比,所以改變所加電壓V,就可以改變1級衍射光的強度,實現對激光光束的光強控制。
3 激光頻率和光強控制系統設計
3.1 基本控制系統設計
在銫原子原子干涉儀中,激光頻率和光強控制系統的基本組成如圖2所示。LabVIEW程序用于控制整個激光系統的時序、微控制器的命令寫入,并通過NI公司的數據采集卡DAQmax控制壓控振蕩器、衰減器和高速開關等儀器。微控制器采用STC12C5A60S2型號,將寫入分頻數值傳送給鎖相環(PLL)。鎖相環由鑒頻鑒相器(PFD)、低通濾波器(LPF)和壓控振蕩器(VCO)組成。經過鎖相之后的信號頻率被鎖定在指定頻率處,該頻率信號經衰減器實現對信號幅值的調制,再經高速開關實現對AOM一級衍射光通斷的高速控制,最后控制信號經功率放大器放大后驅動AOM。其中,衰減器和高速開關也由上位機控制。由此系統即實現對激光的移頻、光強調制、高速通斷等功能。
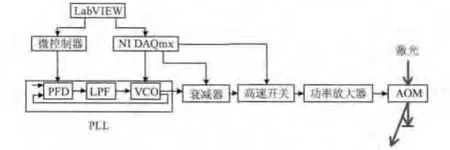
圖2 基本控制系統示意圖
其中,系統時鐘是保證各個光束相位相同,鎖相環的鑒相芯片采用AD公司生產的鎖相芯片ADF4001,濾波器采用有源二階后置濾波器,壓控振蕩器采用Mini-Circuits公司的POS-200。衰減器、高速開關和功率放大器分別采用Mini-Circuits公司的PAS-1+、ZASWA-2-50DR+和AN-60-008。
3.2 激光頻率和光強控制整體系統
在基本控制系統的基礎上,將光電探測器、比較放大電路加入,可以對激光光強進行控制,得到激光頻率和光強控制的整體系統示意圖如圖3所示。
PLL產生的頻率信號經衰減器、高速開關和功率放大器之后,作為聲光調制器的驅動進入AOM。AOM輸出的1級光經過分束器后分為兩部分,其中透射光作為原子干涉儀需要的光束輸出,反射光則經過光電探測器(PD)轉換成電壓信號之后和設定的基準電壓信號比較。若輸入激光功率穩定,則產生的比較差值為0,衰減倍數不改變,AOM輸出光強保持穩定。若輸入激光功率增加,則1級衍射光的光強增加,光電轉換后的電壓增加,與基準信號的比較差值為負值,衰減器的衰減倍數增大,使得加在AOM上的電壓降低,經過AOM的1級衍射光的光強減弱。反之,若輸入激光功率下降,則可以補償1級衍射光的光強增大。這樣通過這種方法,實現了光強穩定控制。
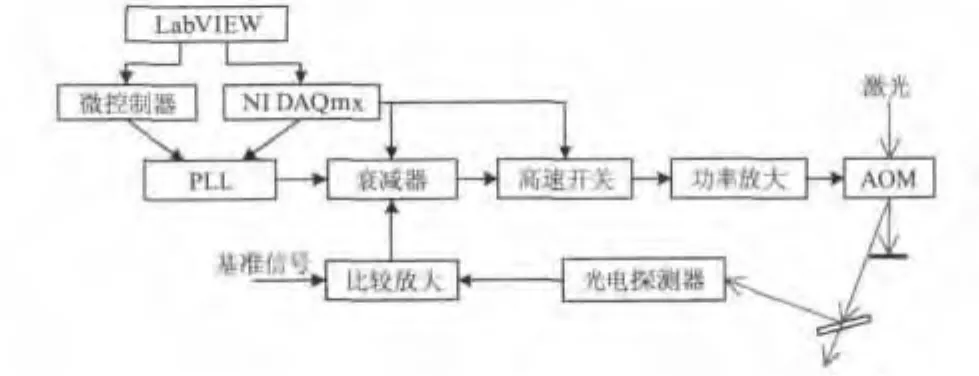
圖3 原子干涉儀中激光頻率和光強控制系統示意圖
綜上所述,整個激光頻率和光強控制系統將激光頻率控制和光強控制集成一體,通過巧妙的設計各處電路的通斷,實現不同的功能要求。比如,當需要移頻并按照一定時序通斷激光時,可以將圖3中下半部分的比較放大電路斷開,這樣移頻、高速通斷以及頻率穩定的功能均可以實現。
4 實驗結果
檢驗這套激光頻率和光強控制系統的各項功能實現,根據前面得到的移頻范圍114~201.5 MHz,首先測量移頻114 MHz時的穩頻性能。
設計的鎖相環鎖定時間小于3 ms,優于大部分鎖相環的鎖定時間,且相位噪聲優于90 dBc@1 kHz,性能良好。利用頻譜分析儀得到的衰減器和功率放大器的輸出信號分別如圖4和圖5所示。
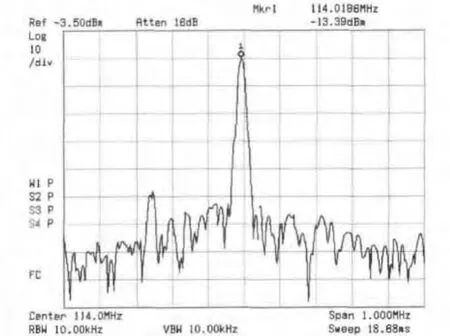
圖4 衰減器輸出端信號頻譜圖
從圖4、圖5中的頻譜圖可以看到,圖4中衰減器輸出信號的中心頻率為114.0 MHz,中心頻率處信號強度為-13.39 dBm,線寬約為190 Hz,信噪比達50 dB;圖5中中心頻率為114.0 MHz,中心頻率處信號強度為12.10 dBm,線寬約為130 Hz,信噪比為25 dB。可以看出AOM(Model 3110-120,Crystal Technology)驅動信號的頻率基本穩定在114 MHz處,而且電信號的功率處在AOM輸入范圍內。
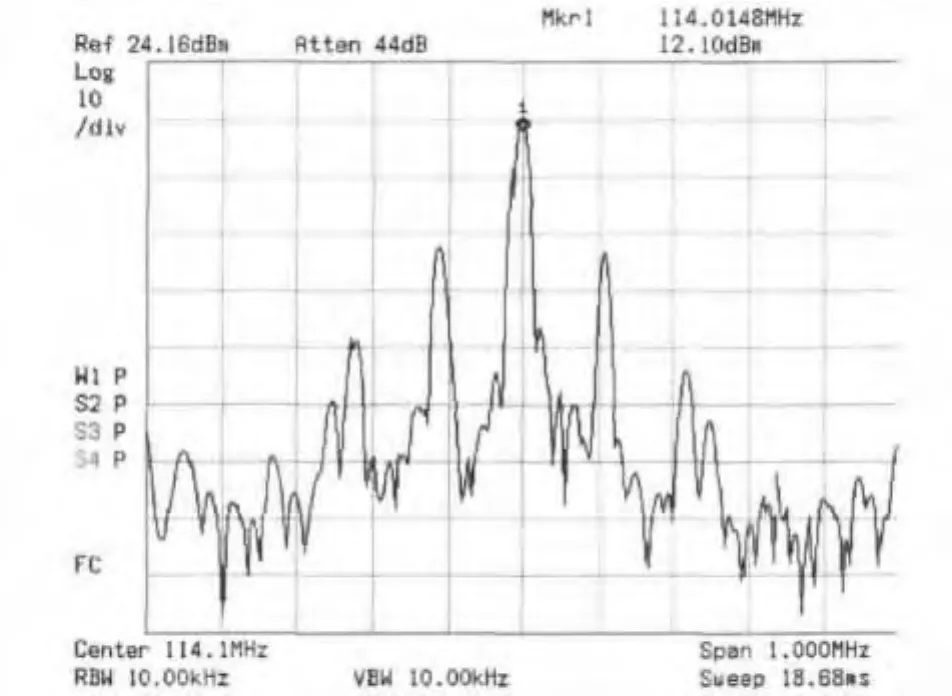
圖5 AOM輸入信號頻譜圖
進一步利用光電探測器(Model 2307,New Focus)測試光強穩定性能。在穩光前,AOM輸出光的光強極易受到外界擾動而變化,光電探測器輸出電壓最大變化為5 mV。然后將光電探測器和比較電路等連通形成穩定光強的回路,得到的穩光后光電探測器輸出電壓最大變化約0.1 mV。由此可見,采用光強穩定系統后,輸出光強的波動僅為原波動的2%,較好地實現了激光光強穩定功能。
最終通過實驗驗證,針對不同移頻范圍的AOM,圖3所示的系統可以實現的移頻范圍是100~207 MHz,且移頻后頻率穩定,可以實現光強的穩定和調制以及激光束的快速通斷等各項功能。
5 結論
根據銫原子干涉儀原理和各階段對激光的不同要求,研制了一套控制激光頻率和光強的系統,實現了激光頻率的偏移和穩頻以及光強的穩定和調制等功能。實驗表明,激光可以移頻114 MHz,且偏移范圍可達到100~207 MHz;穩光后的輸出功率波動減小為穩光前的2%。所研制的系統符合基于銫原子的原子干涉儀對激光的功能和指標要求。該系統成本低,效率高,可以廣泛應用在原子鐘、原子重力梯度儀和納米刻蝕等系統[10,15-17]。
[1] GU Yu.Investigations on the PLL oscillator based on dig-ital IF technologies[D].Nanjing:Southeast University,2005.(in Chinese)顧宇.用于數字中頻收發信機的鎖相本振源[D].南京:東南大學,2005.
[2] WANGHongying.Design of vehicle-mounted system based on DDS drive PLL[D].Chengdu:University of Electronic Science and Technology of China,2010.(in Chinses)王洪英.基于 DDS驅動 PLL車載系統本振的設計[D].成都:電子科技大學,2010.
[3] Schmidt Steven R.Design of large-format gas laser color printer[J].Proceedings of SPIE,1990,1254:24 -32.
[4] K.imitoshi Nagao,et al.High image quality laser color printer[J].Proceedings of SPIE,1989,1079:90 -98.
[5] D V Strekalov,Andrey Turlapov,A Kumarakrishnan,et al.Periodic structures generated in a cloud of cold atoms[J].Physical Review A,2002,66(2):023601 -023611.
[6] Klaus Hornberger,Stefan Gerlich,Philipp Haslinger,et al.Colloquium:Quantum interference of clusters and molecules[J].Reviews of Modern Physics,2012,84:157.
[7] YAO Zhanwei,WANG Kai,LI Ruibing,et al.Rotation measurement based on atom interferometer technology[C].2011 small satellite technology exchange meeting,Beijing,China,2011.(in Chinese)姚戰偉,王鍇,李潤兵,等.基于原子干涉技術的轉動慣量[C].2011年小衛星技術交流會,北京:2011.
[8] DUAN Xiaochun.Principle experiment of measuring gravity gradient by atom interferometry[D].Wuhan:Huazhong University of Science and Technology.2011.(in Chinese)段小春.原子干涉重力梯度測量原理性實驗研究[D].武漢:華中科技大學,2011.
[9] LI Ruibing,WANG Jin,ZHAN Mingsheng.New generation inertial navigation technology:cold atom gyroscope[J].GNSS world of China,2010,35(4):1 -4.(in Chinese)李潤兵,王謹,詹明生.新一代慣性導航技術:冷原子陀螺儀[J].全球定位系統,2010,35(4):1 -5.
[10] M J Snadden,J M Mcguirk,P Bouyer,et al.Measurement of the earthos gravity gradient with an atom interferometerbased gravity gradiometer[J].Physical Review Letters,1998,81(5):971 -974.
[11] WANG Wei,WANG Xuefeng,MA Jianli,et al.Key technology and development of atom interferometric gyroscope[J].Navigation and control,2011,10(2):55 - 60.(in Chinese)王巍,王學峰,馬建立,等.原子干涉陀螺儀關鍵技術及進展[J].導航與控制,2011,10(2):55-60.
[12] WANG Wenli.Key techniques of cold Ytterbium atomic clocks[D].Shanghai:East China Normal University,2011.(in Chinese)王文麗.冷鐿原子光鐘的關鍵技術研究[D].上海:華東師范大學,2011.
[13] SUN Hengli.Study of phase frequency control system for atom interferometer[D].Hangzhou:Zhejiang University.(in Chinese)孫亨利.原子干涉儀高精度穩頻鎖相系統的研究[D].杭州:浙江大學,2012.
[14] HUO Lei,LI Xiaodong.Non-uniform sound field distribution of acousto-optic device in laser heterodyne interferometry[J].Opt.Precision Eng.,2011,19(10):2386 -2392.(in Chinese)霍雷,李曉東.激光外差干涉中聲光器件的非均勻聲場特 性 [J].光 學 精 密 工 程,2011,19(10):2386-2392.
[15] WANG Yingju,Dana Z Anderson,Victor M Bright.An atom michelson interferometer on a chip using a Bose-Einstein condensate[J].Physical Review Letters,2005,94(9):90405.
[16] C R Ekstrom,J Schmiemayer,M S Chapman,et al.Measurement fo the electric polarizability of sodium with an atom interferometer[J].Physical Review A,1995,51(5):3883-3889.
[17] Sebastian Fray,Cristina Alvarez Diez,Theodor W Hansch,et al.Atomic interferometer with amplitude gratings of light and its applications to atom based tests of the equivalence principle[J].2005,7:1 -4.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
