航母運動對著艦引導雷達精度的影響
2014-02-07 02:55:36桑德一趙建軍楊利斌
中國艦船研究 2014年6期
桑德一,趙建軍,楊利斌
海軍航空工程學院,山東煙臺264001
0 引 言
艦載機著艦引導雷達是艦載機起飛和著艦引導系統(tǒng)的重要組成部分,它為航母艦載機的起飛和降落提供必要的監(jiān)測與引導,是航母艦載機正常工作的重要保障。航母在海上航行時受海浪、海流和海風的影響,會產生六自由度的運動,即繞三坐標軸的旋轉(橫搖、縱搖、艏搖)和沿三坐標軸的平移(橫蕩、縱蕩、垂蕩)[1]。航母的這種六自由度運動會影響著艦引導雷達對艦載機的探測精度,嚴重時,還會造成艦載機著艦事故[2-3]。為排除航母運動給艦載機著艦帶來的安全隱患,需要仔細計算和分析航母六自由度運動對著艦引導雷達精度的影響,建立海浪模型和航母運動模型以及必要的坐標系及其之間的坐標系轉換關系,按照實際要求分別仿真計算航母橫搖、縱搖、艏搖和沿軸平移運動對雷達探測精度的影響,并根據仿真結果進行詳細分析。
1 建立坐標系并推導其轉換關系
1.1 建立坐標系
在分析航母運動對雷達測量精度的影響時,需要用到慣性坐標系和附體坐標系,用這2 個坐標系之間差角的變化來表征航母姿態(tài)角的變化[4-5]。
1)慣性坐標系。
慣性坐標系的原點Ol定義為航母搖擺運動中心在甲板上的投影點,Xl軸平行于當地水平面指向東,Yl軸平行于當地水平面指向北,Zl軸垂直于Xl和Yl軸指向上,Xl軸、Yl軸和Zl軸組成右手坐標系,慣性坐標系固定于空間的某一點,不隨航母的搖擺而改變各坐標軸的指向。此坐標系作為基準參考系。慣性坐標下的坐標用(xl,yl,zl)表示,具體如圖1 所示。
2)附體坐標系。
附體坐標系原點Od位于航母搖擺運動中心在甲板上的投影點,Yd軸平行于航母艏艉線指向艦艏,Xd軸平行于航母甲板且垂直于Yd軸指向右舷,Zd軸垂直于甲板平面指向上組成右手直角坐標系。該坐標系隨航母的搖擺運動而運動,與慣性坐標系之間的夾角即為航母的姿態(tài)角。該坐標系下的坐標用(xd,yd,zd)表示,具體如圖1 所示。

圖1 慣性坐標系和附體坐標系及其轉換關系示意圖Fig.1 Schematic of inertial coordinate system and body fitted coordinate system
1.2 坐標系之間的轉換
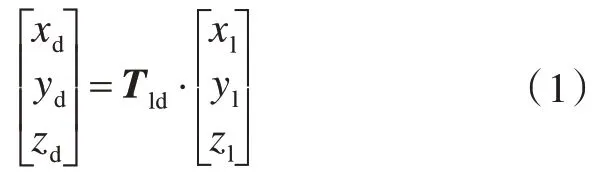
1)慣性坐標系轉換到附體坐標系。
慣性坐標系和附體坐標系的原點重合,兩者之間沒有平移變換,只存在角度的旋轉,而引起這種旋轉的原因是航母的3 個姿態(tài)角,即橫搖角r 、縱搖角p 和艏搖角y 。根據三維坐標系的變換關系,推導出慣性坐標系到附體坐標系的變換公式如式(1)所示:
其中,

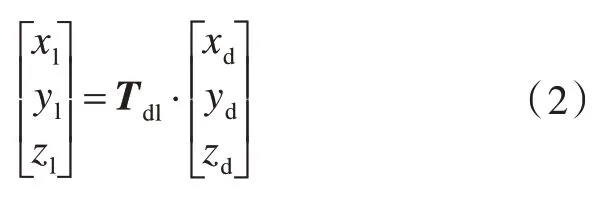
2)附體坐標系轉換到慣性坐標系。
根據矩陣求逆運算,容易得到附體坐標系到慣性坐標系的轉換公式:
其中,

慣性坐標系和附體坐標系間的轉換示意圖如圖1 所示。
2 航母的平移運動對雷達測量精度的影響分析
航母沿三坐標軸的平移運動中,沿Y 軸的平移運動不僅包含縱蕩運動還包含航母的航行運動,所以對雷達的測量精度影響最大。下面,將以此為例分析航母的平移運動對雷達測量精度的影響。當目標位于艦艉后上方時,航母沿Y 軸的平移運動對雷達測量的距離和俯仰角的影響最大,而對方位角的影響為0。如圖2 所示,目標M 為一固定目標,其空間位置不隨時間改變。在t1時刻,目標的俯仰角和距離分別為E1和R1。在t2時刻,目標的俯仰角和距離分別為E2和R2。從t1時刻到t2時刻航母沿Y 軸的平移距離為d 。設目標的高度為h,t1時刻目標的水平距離為l,其中,d <<l,根據三角形三邊關系,有

又因為d <<l,故d <<R1,所以R1≈R2。
由三角形相似原理可知Δh <<h,同時有
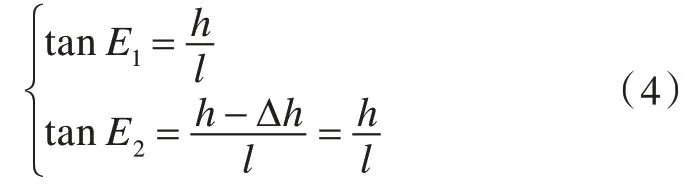
所以E1=E2。
由此可見,航母的平移運動對雷達的測量精度基本上沒有影響。
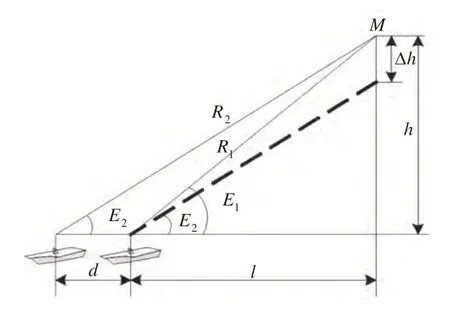
圖2 航母沿軸運動對雷達測量精度的影響Fig.2 Carrier translation motion influence on radar measurement accuracy
3 航母搖擺運動對雷達測量精度的影響分析
3.1 距離誤差ΔR
如圖3 所示,目標M 與坐標原點O 的距離為R;在t1時刻,雷達天線中心位于A1點,目標到雷達的距離為R1;在t2時刻,雷達天線中心位于A2點,目標到雷達的距離為R2;A1與A2的距離為d 。由于航母搖擺運動的姿態(tài)角很小,故∠A1OA2很小,且雷達的天線中心與航母搖擺中心之間的空間距離OA1不大,所以d 很小,遠小于R1,R2和R,因此,ΔR=R1-R2<d ≈0,即航母搖擺運動對雷達測量距離的影響很小。

圖3 航母搖擺運動對雷達測量距離的影響示意圖Fig.3 Carrier rocking motion influence on the radar distance measurement
3.2 角度誤差
設航母姿態(tài)角為橫搖角φ,縱搖角θ,艏搖角ψ,所以XdOdYd平面與XlOlYl不重合,設這兩個平面之間的夾角為γ,則這兩個平面的法向量OB和OC 之間的夾角也為γ,平面XdOdYd的法向量在平面XlOlYl上的投影OX 與Yl軸之間的夾角為Am。
如圖4 所示,在慣性坐標系中取向量a=(0,0,1),顯然該向量平行于zl軸,垂直于xlolyl平面,該向量經式(1)旋轉后變?yōu)閍′,

γ 即為a′與a 的夾角,于是有

整理后得

由圖4 可以看出,角Am可以由向量a′的x 和y 坐標的比值求出。

整理后,得

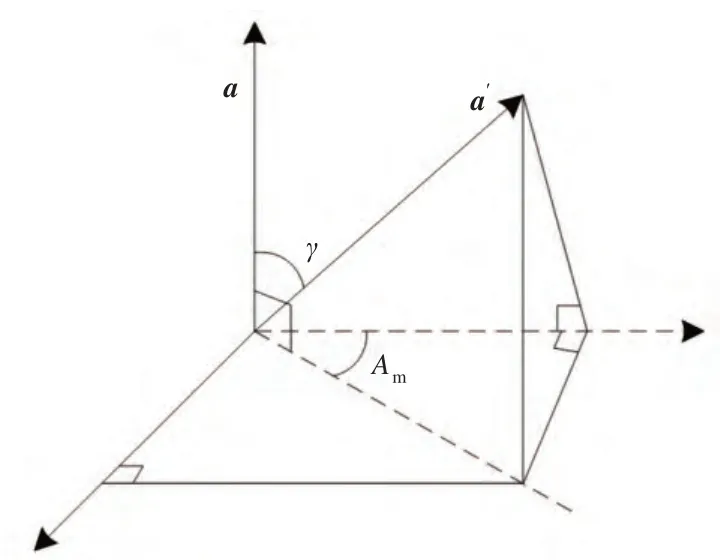
圖4 由橫搖角和縱搖角導致的方位角誤差Fig.4 The azimuth error caused by the roll angle and pitch angle
如圖5 所示,Yl軸是雷達天線轉臺的俯仰軸,Zl軸是雷達天線轉臺的方位軸。Yd和Zd是雷達天線轉臺由航母搖擺運動導致的傾斜后的俯仰軸和方位軸。方位軸轉動時,俯仰軸在傾斜面上轉動。
1)俯仰角誤差ΔE 。
當俯仰軸轉角為0°時,由于方位軸傾斜,所以電軸也在傾斜面上,電軸與水平面的夾角就是俯仰角誤差。方位軸轉動時,電軸也在傾斜面上轉動,所以俯仰角誤差會隨方位角變化。當方位軸轉到任意方位角A 時,電軸OT 在水平面上的投影為OD。在球面直角三角形XTD 中,有
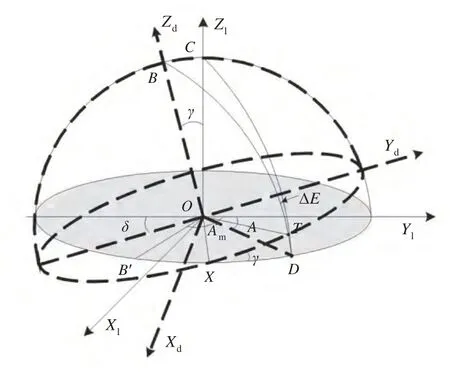
圖5 航母姿態(tài)角對雷達測角精度的影響Fig.5 Carrier's attitude angle influence on radar measurement accuracy
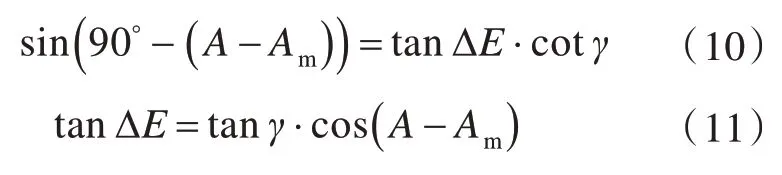
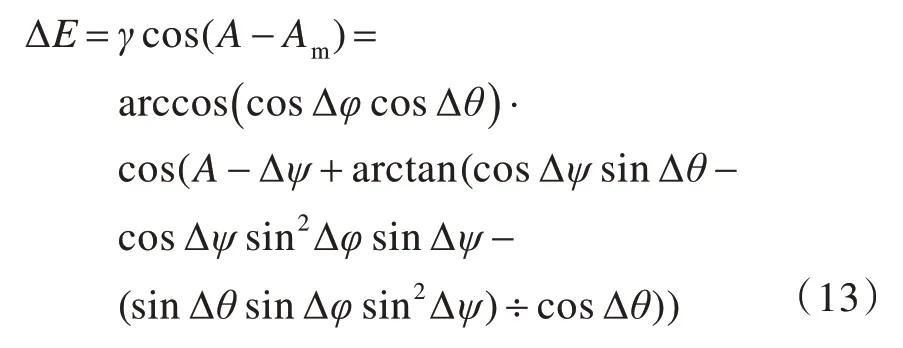
因γ 很小,tan γ ≈γ,tan ΔE ≈ΔE,于是

把式(7)和式(9)代入式(12),得
2)方位角誤差ΔA。
因為俯仰軸與電軸垂直,故俯仰軸對水平面的傾角δ 的變化規(guī)律與俯仰角誤差ΔE 的變化規(guī)律在相位上差90°,所以
由于俯仰軸非水平,故俯仰軸轉動時引起的方位角誤差

將式(15)代入式(16),得

把式(7)和式(9)代入式(17),得
4 航母運動對雷達精度影響仿真
根據艦載機起飛和著艦要求,航母的橫搖、縱搖、艏搖、橫蕩、縱蕩和垂蕩運動需在一定的幅度范圍和周期內[6-8],因此根據上述海浪模型和航母姿態(tài)模型進行仿真計算時,要滿足以下條件[9-11]:航母的橫搖角小于2°,橫搖周期大于10 s;縱搖角小于1°,縱搖周期大于15 s;艏搖角小于1°,艏搖周期大于6 s;橫蕩幅度小于1.5 m,橫蕩周期大于15 s;縱蕩幅度小于2 m,縱蕩周期大于18 s;垂蕩幅度小于2 m,垂蕩周期大于20 s;配平角小于0.2°,傾側角小于0.4°。根據艦載機的著艦規(guī)程,艦載機由航母后方進近下滑著艦,所以假定被測目標位于航母后方偏上的位置。
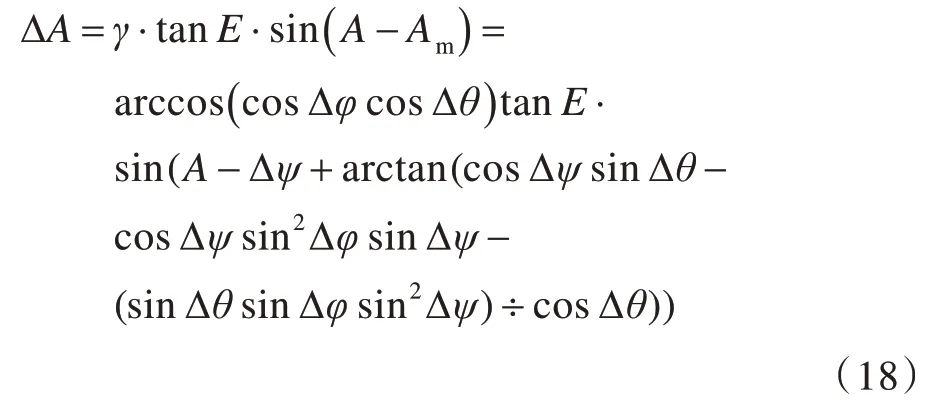
首先,根據航母的運動模型計算航母的六自由度運動曲線,如圖6~圖7 所示。由圖6~圖7 可以看出,航母的搖擺運動和沿軸平移運動具有很強的周期性。
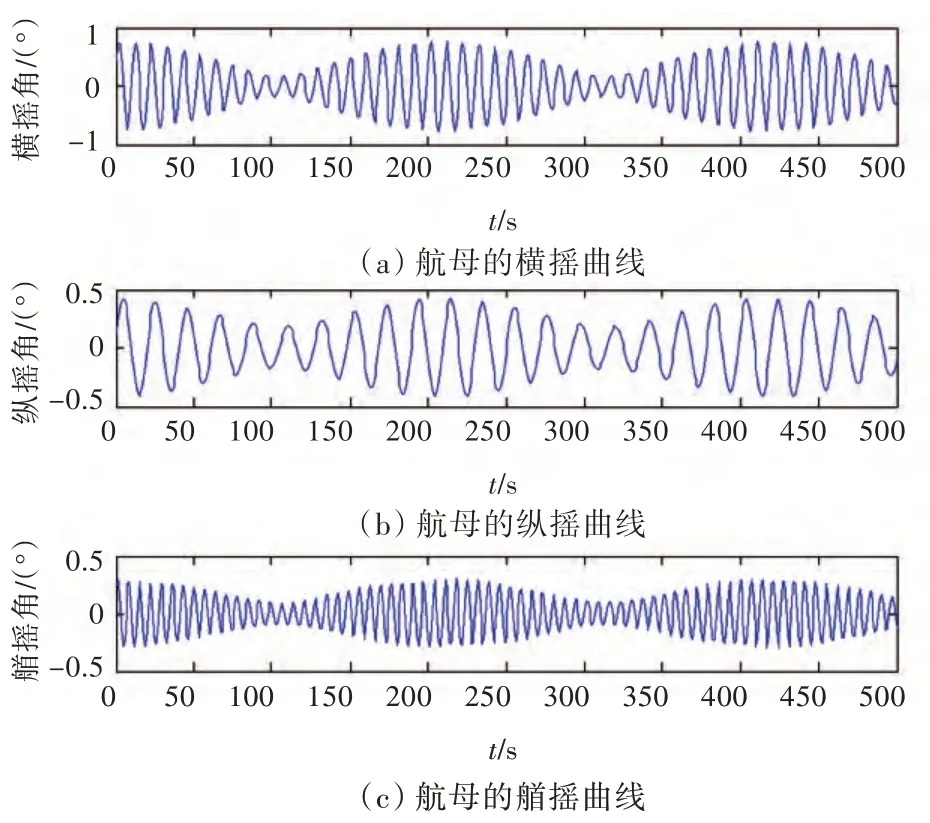
圖6 航母的三軸搖擺運動曲線Fig.6 Triaxial rocking motion curve of carrier
圖7 航母的沿軸平移運動曲線Fig.7 Translational motion curve along axis of carrier
為研究航母的橫搖、縱搖、艏搖、橫蕩、縱蕩、垂蕩運動分別對雷達探測精度的影響,進行了多次仿真計算,分別計算航母單獨存在橫搖、縱搖、艏搖、橫蕩、縱蕩、垂蕩運動而忽略其他運動形式的情況下,航母運動對雷達測量目標位置信息的影響曲線,仿真結果如圖8~圖13 所示。
由圖8 可以看出,航母的橫搖運動給雷達測量目標的俯仰角和方位角分別帶來了約0.05°和0.1°的誤差,給雷達測量目標距離帶來了約0.2 m的誤差,經相關性測試,發(fā)現雷達測試數據的誤差曲線與航母的橫搖曲線呈現出高度的相關關系。

圖8 航母橫搖對雷達探測精度的影響Fig.8 Influence of carrier roll motion on the accuracy of the radar
由圖9 可以看出,航母的縱搖運動給雷達測量目標的俯仰角帶來了約1°的誤差,對雷達測量目標方位角的影響為10-3量級,可以忽略;給雷達測量目標距離帶來了約1 m 的誤差,經相關測試,發(fā)現雷達測試數據的俯仰角誤差與航母縱搖運動呈線性關系。

圖9 航母縱搖對雷達探測精度的影響Fig.9 Influenceofcarrier pitching motion on the accuracy ofthe radar
由圖10 可以看出,航母艏搖角對雷達測量目標俯仰角基本沒有影響,給雷達測量目標方位角帶來了約1°的誤差,給雷達測量目標距離帶來了約2 m 的誤差,且方位角誤差與航母艏搖運動呈現線性關系。
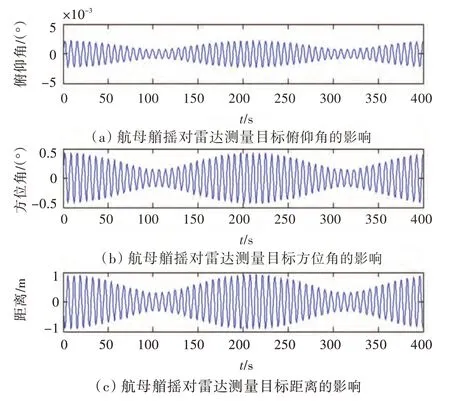
圖10 航母艏搖對雷達探測精度的影響Fig.10 Influence of carrier yawing motion on the accuracy of the radar
由圖11~圖13 可以看出,航母沿軸平移運動對雷達測量目標的俯仰角和方位角的影響分別為10-4和10-3量級,可以忽略;對雷達測量目標的距離約有0.2 m 的影響。
最后,綜合考慮航母的橫搖、縱搖、艏搖和沿軸平移運動,仿真計算航母運動對雷達探測精度的影響,仿真結果如圖14 所示。在航母按前述運動模型運動并且目標位于航母后上方時,航母運動對雷達測量目標的俯仰角、方位角和距離分別產生了約1.5°,1°和5 m 的影響。

圖11 航母橫蕩對雷達探測精度的影響Fig.11 Influence of carrier sway motion on the accuracy of the radar
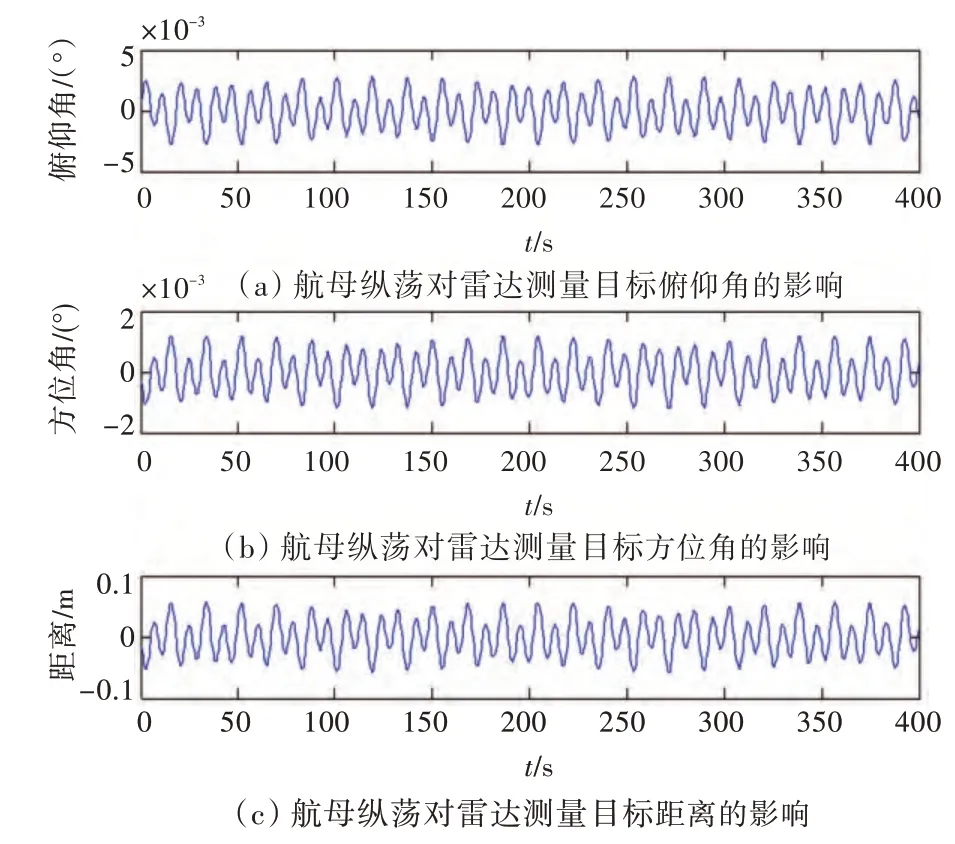
圖12 航母縱蕩對雷達探測精度的影響Fig.12 Influence of carrier surging motion impact on the accuracy of the radar

圖13 航母垂蕩對雷達探測精度的影響Fig.13 Influence of carrier heave motion on the accuracy of the radar
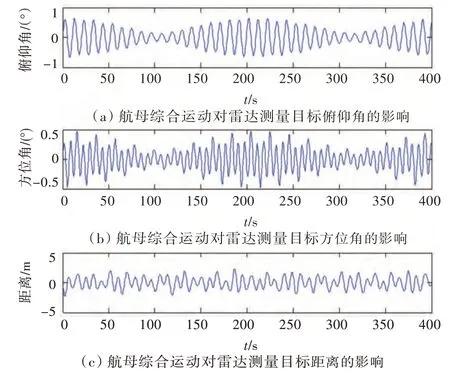
圖14 航母綜合運動對雷達探測精度的影響Fig.14 Influence of carrier comprehensive ship motion impact on the accuracy of the radar
5 結 語
著艦引導雷達負責跟蹤和引導航母艦載機著艦,其精度要求很高,并且在工作過程中雷達時刻受航母六自由度運動的影響。本文建立了必要的坐標系和航母運動模型,并根據實際要求進行計算機仿真,詳細分析了航母運動對著艦引導雷達探測精度的影響,得出著艦引導雷達的方位角誤差與航母艏搖角成線性關系而與縱搖角無關、俯仰角誤差與航母縱搖運動高度相關、距離誤差與航母搖擺運動關系不大的結論。為著艦引導雷達的標校工作提供了一定的理論依據和參考,為研究航母的運動姿態(tài)提供了思路。
[1]簡仕龍.航天測量船海上測控技術概論[M].北京:國防工業(yè)出版社,2009.
[2]董玫,張守宏,吳向東,等.艦載雷達天線測角誤差分析[J].系統(tǒng)仿真學報,2009,21(15):607-612.DONG Mei,ZHANG Shouhong,WU Xiangdong. An?gular error analysis of shipboard radar antenna[J].Journal of System Simulation,2009,21(15):607-612.
[3]潘良.航天測量船船姿船位測量技術[M].北京:國防工業(yè)出版社,2009.
[4]張志遠,羅國富.艦船姿態(tài)坐標變換及穩(wěn)定補償分析[J].艦船科學技術,2009,31(4):34-40.ZHANG Zhiyuan,LUO Guofu. Coordinate transforma?tion of warship pose and analysis of stabilization com?pensation[J]. Ship Science & Technology,2009,31(4):34-40.
[5]馮小勇.運動載體實時精密水平測量方法:中國,200910046330.3[P].2010-04-21.
[6]徐德倫,于定勇.隨機海浪理論[M].北京:高等教育出版社,2001.
[7]邱宏安.隨機海浪模型的建立及仿真分析[J].系統(tǒng)仿真學報,2000,12(3):226-228.QIU Hong'an. Establishing and simulation for random ocean state model[J]. Journal of System Simulation,2000,12(3):226-228.
[8]王恒,李永剛,陳亮,等.測量船船搖前饋數據處理方法研究及應用[J].飛行器測控學報,2011,30(2):64-69.WANG Heng,LI Yonggang,CHEN Liang,et al. Pro?cessing of the shaking feedforward data of space instru?mentation ships[J]. Journal of Spacecraft TT&C Tech?nology,2011,30(2):64-69.
[9]NEUMANN G. On wind generated ocean waves with special reference to the problem of wave forecasting[D].New York:New York University,1952.
[10]楊鹽生,方祥麟.船舶操縱性能仿真預報[J].大連海事大學學報:自然科學版,1997,23(1):1-6.
[11]吳秀恒,劉祖源,施生達.船舶操縱性[M].北京:國防工業(yè)出版社,2005.
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
