基于S函數的三相異步電動機軟啟動仿真
2014-02-09 01:57:36王景婷許伯強
電力科學與工程 2014年4期
關鍵詞:系統
王景婷,許伯強
(華北電力大學 電氣與電子工程學院,河北 保定 0 71003)
基于S函數的三相異步電動機軟啟動仿真
王景婷,許伯強
(華北電力大學 電氣與電子工程學院,河北 保定 0 71003)
為了探究在三相異步電機啟動過程中采用軟啟動技術給啟動過程帶來的影響,根據異步電機的數學模型給出了3種三相異步電機軟啟動方式,分析了這幾種方式的優缺點,并以Simulink中的S-函數為基礎編寫異步電機的數學模型和啟動方案,并對3種啟動方案進行了仿真。比較了在3種啟動方式下各個物理量的變化情況,驗證了軟啟動策略的有效性,即采用軟啟動技術可以優化電機的啟動性能,同時可以看到S-函數極大擴展了Simulink的應用范圍。
S-函數;三相異步電機;軟啟動
0 引言
交流異步電機結構簡單、運行可靠、環境適應性強和拖動性能好,電機在啟動開始時反電勢為零,沖擊電流很大,啟動電流過大時,將使電機本身受到過大電磁力的沖擊;頻繁啟動,繞組會過熱,另外,由于啟動應力較大,使得負載使用壽命降低,過大電流不僅在定子線圈和轉子籠條上產生很大沖擊力,破壞繞組絕緣和造成籠條斷裂,引起電機故障[1]。為了解決電機啟動時產生的大電流,需要對電機進行軟啟動來降低啟動電流。傳統的啟動方式能較好地解決啟動電流大的問題,但基本上都是有級調節來完成的。隨著電力電子技術的發展,新興的啟動技術隨之而來,更好地解決了這個問題,其中,恒壓頻比控制啟動就是較好的方式之一。本文啟動控制策略便是基于恒壓頻比控制的。Simulink中的S-函數具有很強的描述動態系統的能力,通過與Simulink中求解器的交互來實現對系統求解。因此,可以用S-函數建立異步電機的模型,并結合異步電機軟啟動的控制思想,對異步電機軟啟動過程仿真,進而驗證所提出的軟啟動控制策略的正確性。本文即按這種思路分析了異步電機的軟啟動過程。S-函數通過與Simulink求解器的交互來實現對動態系統的描述,極大地擴展了Simulink的使用范圍,使得對用數學方程式來描述的系統的仿真變得極為方便。
1 三相異步電機啟動
1.1 異步電機啟動過程的基本方程
在啟動過程中,異步電機的轉子速度是變化的,這時采用同步坐標系統比較方便[2]。根據異步電機在d,q,0坐標系下的基本方程和坐標變換公式即可求得異步電機在這種坐標系統中的基本關系式。由于轉子對稱、轉子繞組短接,因此,可取udr=uqr=0并不計零軸分量,這樣可得到所需的方程為:
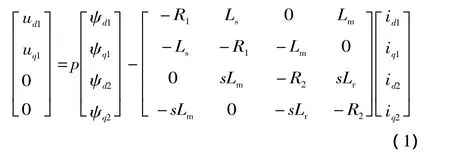
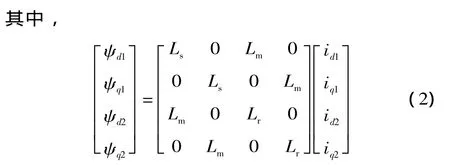
式中:下標1代表定子量;下標2代表轉子量;Ls為定子自電感;Lr為轉子自電感;Lm為定、轉子之間的互電感;R1和R2分別為定子和轉子電阻;s為轉差率,s= (ωs- ωr)/ωs,ωs,ωr分別為同步轉速和轉子角速度;udr,uqr分別為轉子軸軸電壓分量。
將式 (1)、 (2)改寫成狀態方程形式,則有:
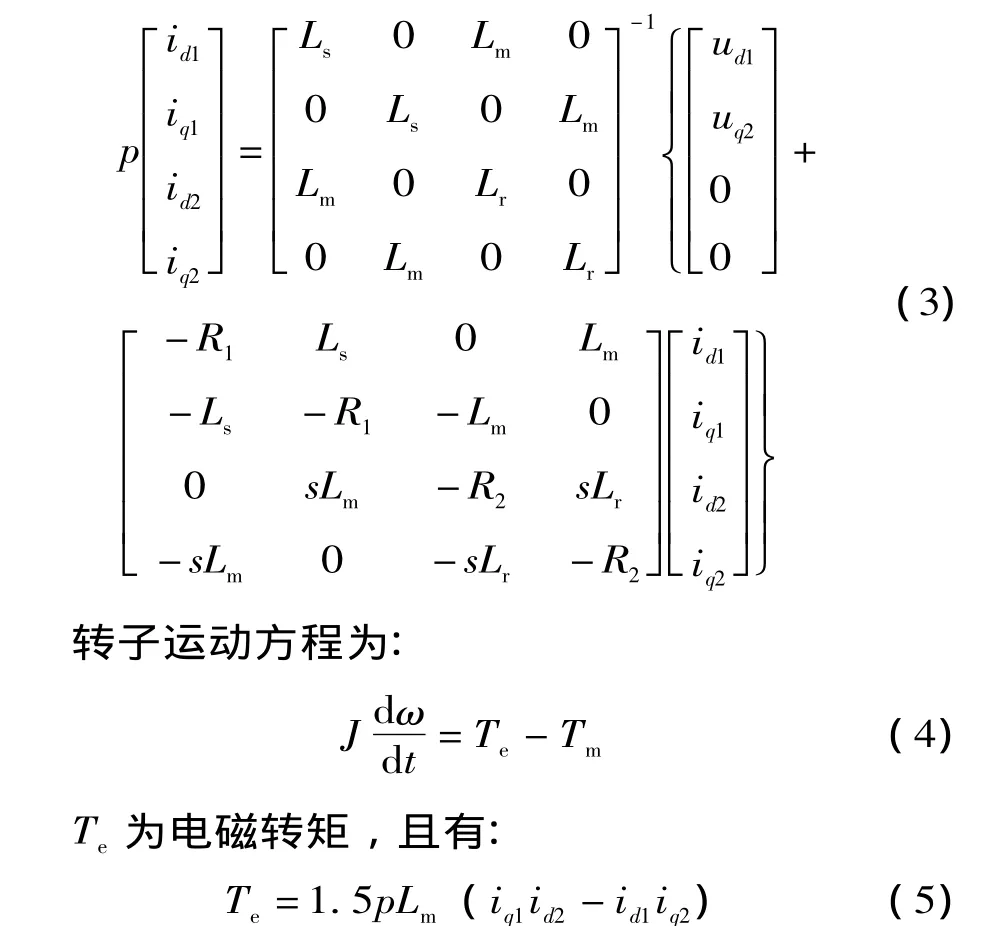
根據式 (3)、(4)及式 (5)即可研究異步電機在啟動過程中的轉矩和電流。式中:Tm為負載轉矩;p為極對數。
1.2 異步電機啟動方式的簡介
傳統軟啟動通常保持頻率不變,通過調節電壓來實現限制啟動電流的。根據電壓是否連續可調分為有級調速和無級調速[3]。
隨著電力電子技術和微機控制技術的發展,依賴于變頻器的控制技術迅速發展,出現了許多現代的啟動方法逐步取代傳統的降壓起動設備。
所謂“軟啟動”,電壓由零慢慢提升到額定電壓,這樣在啟動過程中的電流,就由過去過載沖擊電流不可控制變成為可控制。并且可根據需要調節啟動電流的大小。電機啟動的全過程都不存在沖擊轉矩,而是平滑的啟動運行。這就是軟啟動。現有的諸多啟動方式中,軟啟動的優點是控制方便、可反饋閉環控制、平滑性好等。對異步電機軟啟動進行仿真研究無疑具有重要意義[4]。
文獻[5]中對異步電機直接轉矩控制系統進行了仿真,文獻 [6]分析了異步電機矢量控制變頻調速系統的仿真,可以看出通過對異步電機仿真的研究能夠對提出的控制方法作進一步的驗證。
本文通過對3種啟動方案仿真進行對比:
第一種方案:啟動的負載為額定負載,供電電壓為額定電壓,頻率為額定頻率,即全壓啟動。
第二種方案:電壓的頻率在啟動時低于額定頻率,然后隨著轉速的上升,逐漸增加頻率,在增加頻率的過程中增加的步長為定值,在這里起始頻率為20 Hz,頻率增加的步長為0.012 7 Hz,確定頻率的初始值以及頻率的增加步長的依據是啟動電流始終不超過額定電流的3倍。
第三種方案:對第二種試驗方案 (2)進行改進,由于第二種方法中頻率始終是增加的,為了啟動電流不超過額定電流的3倍,步長被限定的很小。導致啟動的速度減慢,為了提高啟動的速度,應該增加步長,所以在第3種方法中步長分為正步長和負步長,這樣可以增加步長,提高頻率的上升速度。通過實時地計算定子電流的有效值,當沒達到上限時采用正步長,當達到上限時采用負步長,并且為了迅速地使電流到達允許的范圍之內,在這里負步長是正步長的兩倍。試驗中頻率起始值為25 Hz,正步長為1 Hz,負步長為-2 Hz。
2 S-函數
S-函數是系統函數 (System Function)的簡稱,是指采用非圖形化的方式 (即計算機語言),區別于Simulink的系統模塊描述的一個功能塊。S-函數能夠接受來自Simulink求解器的相關信息,并對求解器發出的命令做出適當的響應,這種交互作用非常類似于Simulink系統模塊與求解器的交互作用。一個結構體系完整的S-函數包含了描述動態系統所需的全部能力,所有其他的使用情況都是這個結構體系的特例。S-函數模塊是整個Simulink動態系統的核心。S-函數是由一種特定的語法構成,用來描述并實現連續系統、離散系統以及符合系統等動態系統。S-函數提供了一種在Simulink模型中增加自制塊的手段,可以使用MATLAB,C,C++,Ada,或Fortran語言來創建自己的塊。按照下面一套簡單的規則,可以在S-函數中實現自己的算法[7]。
2.1 Simulink塊的數學關系
Simulink塊包含一組輸入、一組狀態和一組輸出。其中,輸出時采樣時間、輸入和塊狀態的函數如圖1所示。
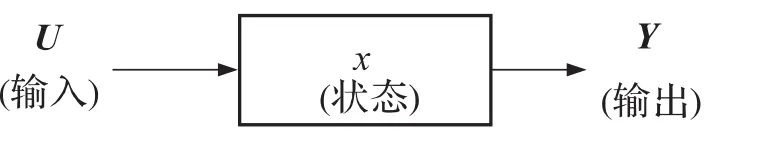
圖1 S-函數輸入、輸出關系
下面的方程描述了輸入、輸出和狀態之間的數學關系:
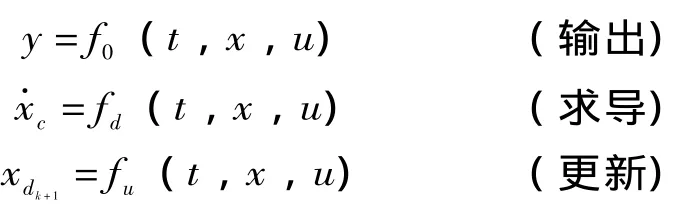
式中:x=xc+xd。
2.2 仿真過程
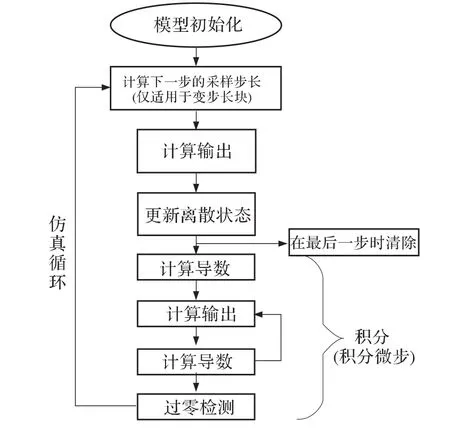
圖2 S-函數流程圖
Simulink模型的執行分幾個階段進行。如圖2所示為一個仿真的步驟。首先進行的是初始化階段,在此階段Simulink將庫塊合并到模型中來,確定傳送寬度、數據類型和采樣時間,計算塊參數,確定塊的執行順序以及分配內存。然后,Simulink進入到“仿真循環”,每次循環可以認為是一個“仿真步”。在每個仿真步期間,Simulink按照初始化階段確定的塊執行順序依次執行模型中的每個塊。對于每個塊而言,Simulink調用函數來計算塊在當前采樣時間下的狀態、導數和輸出。如此反復,一直持續到仿真結束[8]。
3 仿真波形
本仿真采用的異步電機的仿真試驗數據如下:
異步電動機容量Sn=2 200 VA;電壓Un=380 V;頻率f=50 Hz;定子電阻Rs=7.092 Ω;定子漏感Lls=0.038 79 H;歸算到定子側的轉子電阻Rrp=9.318 4 Ω;歸算到定子側的轉子漏感Llrp=0.038 79 H;互感Lm=0.776 319 H;轉動慣量J=0.089 kg·m2;極對數p=2。
由圖3可以看出第一種方案定子電流很大,采用頻壓比控制啟動,起動電流明顯減小,但啟動時間增長,定步長啟動時間最長,雙向啟動時間要小于定步長啟動。

圖3 定子A相電流
由圖4可以看出直接啟動轉速最快到達穩定狀態,第三種方案啟動次之,定步長啟動最慢。這是由于第二種方案為了使啟動電流不超過額定電流的3倍,步長被限定的很小,導致啟動速度變慢。
由圖5~13可以看出3種啟動方案最終都能達到穩定狀態且最終狀態一致,證明啟動方案可行,但是,達到穩定狀態的時間卻不一樣,第一種直接啟動最快,第二種定步長啟動最慢,第三種雙向步長啟動比定步長要快。
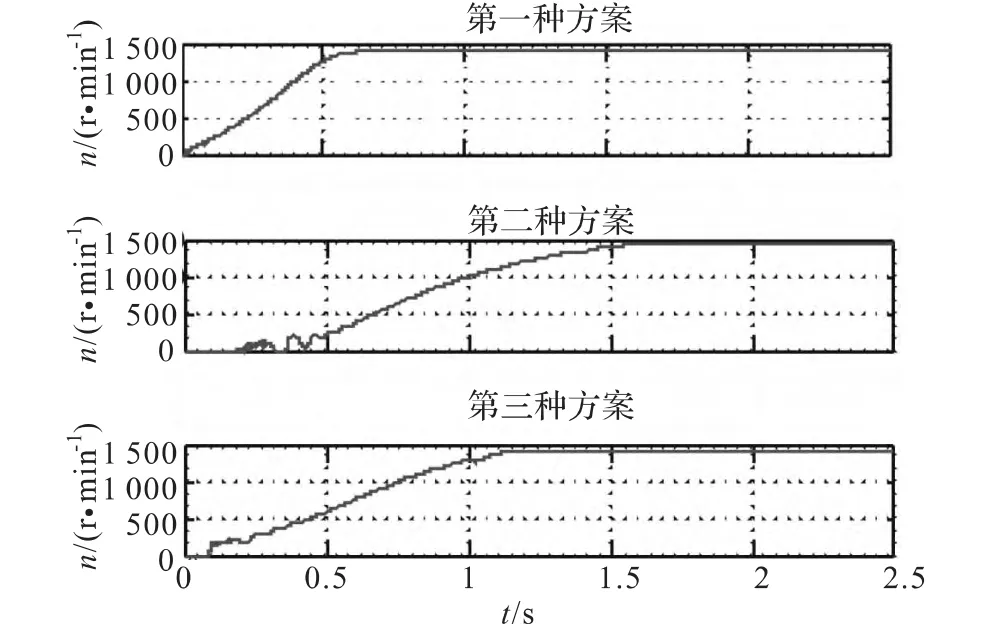
圖4 轉速變化曲線
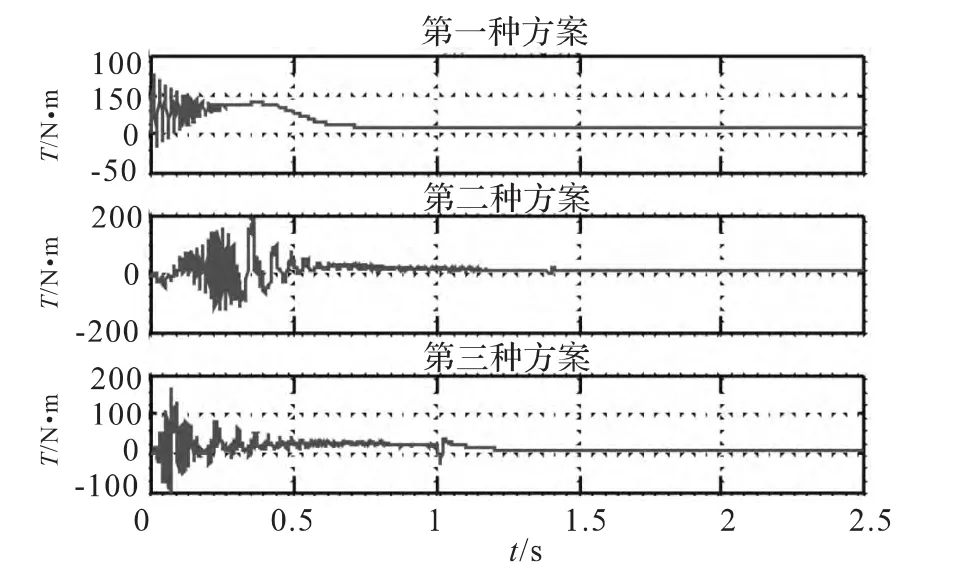
圖5 轉矩變化曲線
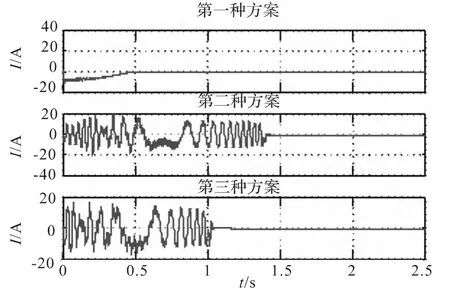
圖6 定子d軸電流
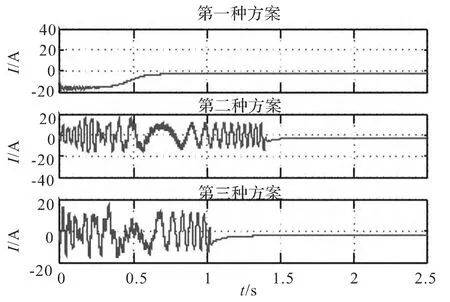
圖7 定子q軸電流
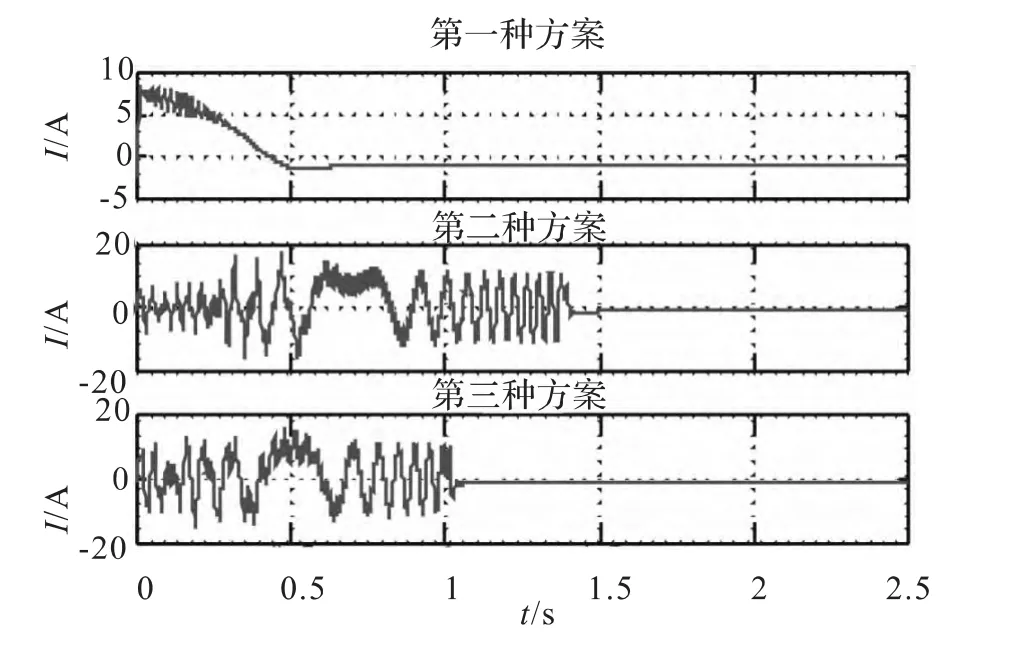
圖8 轉子d軸電流
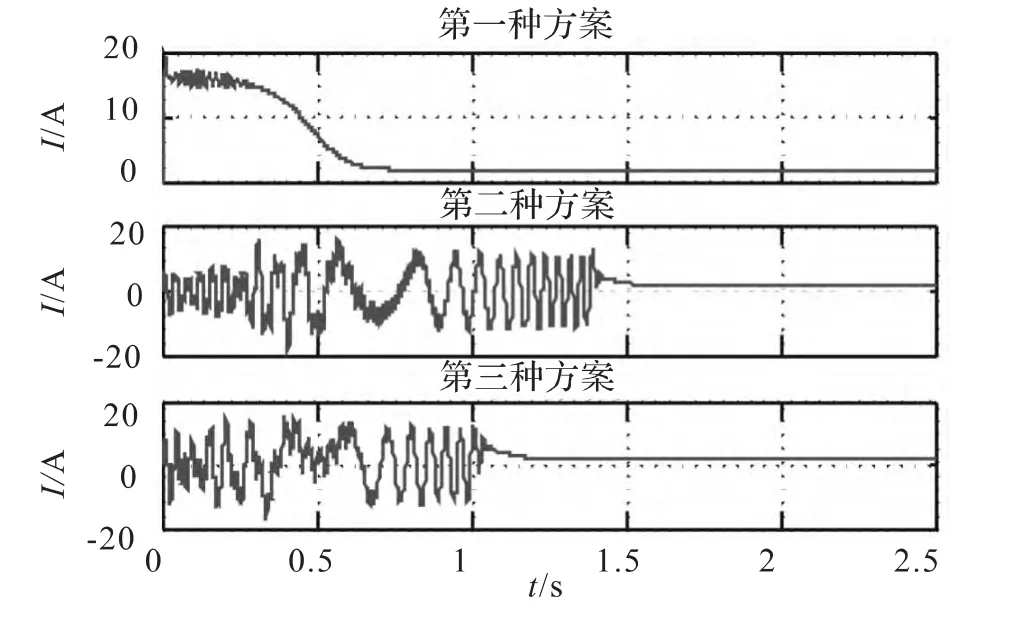
圖9 轉子q軸電流
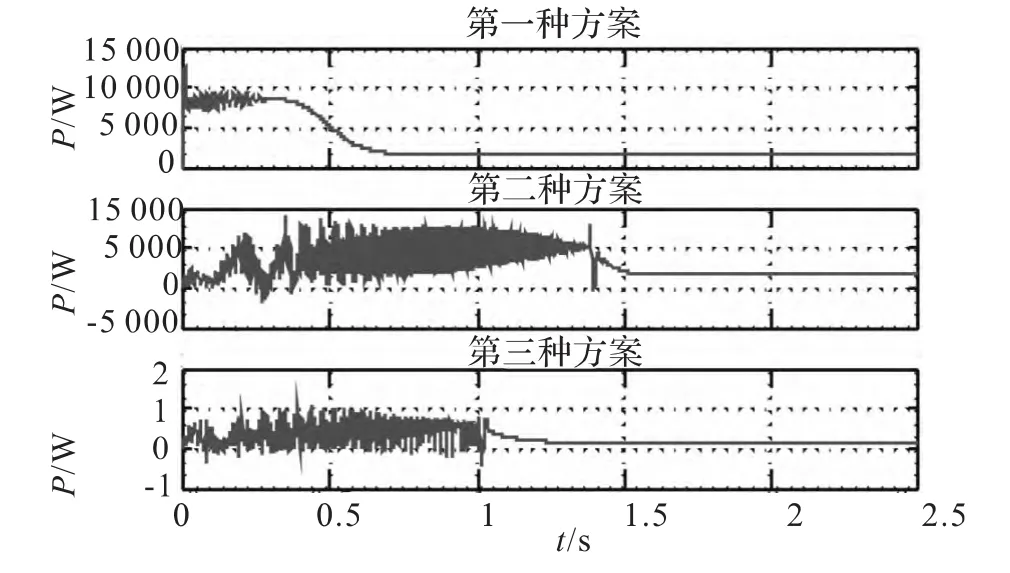
圖10 輸入的有功功率
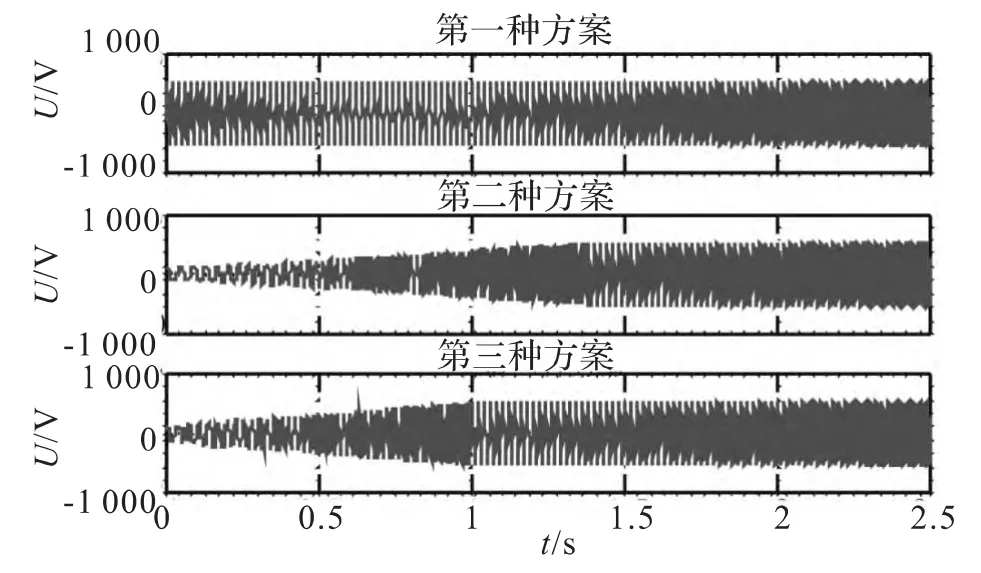
圖11 定子電壓變化曲線
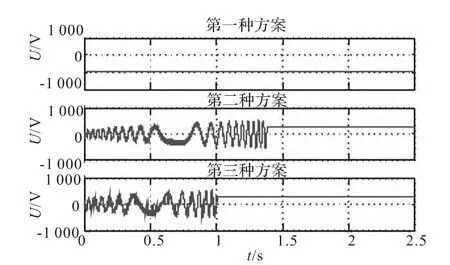
圖12 定子電壓d軸分量變化曲線
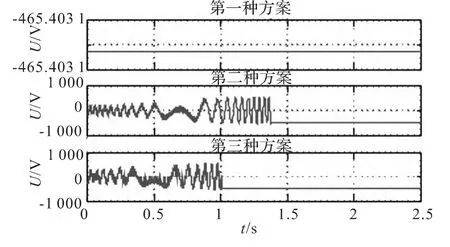
圖13 定子電壓q軸分量變化曲線
4 結論
采用直接全載啟動時啟動電流過大,對電機造成很大的損害;頻率定步長啟動時,雖然啟動電流限制在安全的范圍內,但是啟動時間相對過長達到穩態大約需1.5 s;而采用雙向步長啟動時可以克服全載啟動和定步長啟動的缺點,可以使啟動時間縮短到1 s,同時保證啟動電流在安全范圍之內。
[1]周俊.基于DSP的三相異步電機的智能軟起動器 [D].杭州:浙江大學,2006.
[2]高景德,王祥珩,李發海.交流電機及其系統的分析[M].北京:清華大學出版社,1994.327-329.
[3]胡紅明.異步電機軟起動研究 [D].武漢:華中科技大學,2010.
[4]黃劭剛,黃華高,季國瑜.基于MATLAB的異步電機軟起動過程的仿真 [J].計算機仿真,2003,20(7):101-102.
[5]張俊喜,張春喜.基于MATLAB/Simulink的異步電機直接轉矩控制系統仿真 [J].電力科學與工程,2006,(2):59-62.
[6]張曉玲,許伯強.異步電機矢量控制變頻調速系統的仿真研究 [J].電力科學與工程,2010,26(12):24-27.
[7]鄭麗霞.MATLAB/Simulink機電一體化應用 [M].北京:機械工業出版社,2012.150-152.
[8]林飛,杜欣.電力電子應用技術的 MATLAB仿真[M].北京:中國電力出版社,2009.15-20.
Simulation of Soft Start-up of Asynchronous Machines Based on S-function
Wang Jingting,Xu Boqiang
(School of Electrical and Electronic Engineering,North China Electric Power University,Baoding 071003,China)
To explore the effect of adopting soft start-up technology in the start-up process during a three-phase induction motor start-up process,according to the mathematical model of the induction motor,three soft start-up modes of three-phase induction motor are given.The advantages and disadvantages of these modes are then analyzed.Based on S-function in Simulink,the mathematical model and start-up solutions of the induction motor are given.The proposed solutions are simulated,and the parameter changes in three start-up methods are compared.The effectiveness of the presented soft start-up strategy is verified.The results show that using soft-start technology can optimize the startup performance of the motor,while the S-function greatly expands the applications range of the Simulink.
S-functions;three-phase asynchronous motor;soft start-up
TM343
A
10.3969/j.issn.1672-0792.2014.04.004
2013-10-14。
國家自然科學基金資助項目 (51277077)。
王景婷 (1987-),男,碩士研究生,研究方向為風力發電機故障機理分析與檢測方法研究,E-mail:fxwq110@163.com。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32