車道偏離預警算法研究
2014-02-16 09:17:40蘇春莉
電子測試 2014年20期
蘇春莉,李 梅
車道偏離預警算法研究
蘇春莉,李 梅
(西安歐亞學院信息工程學院,陜西西安,710065)
本文主要對車道偏離預警算法進行一定的研究。在介紹算法基本流程的基礎上,主要闡述了圖像預處理、車道識別、偏離預警三個實現步驟。實驗表明,該方法能夠正確分析車道中的位置信息,當車輛偏離車道時及時給予報警。
車道線識別;圖像預處理;偏離決策
車道偏離造成的人員財產損失約占整個交通事故中損失的三分之一之多,這些事故主要由于駕駛員注意力分散造成的。車道偏離預警系統(lane departure warning system,LDWS)的開發應用能夠提醒和輔助駕駛員及時修正無意識的車道線偏離,從而減少或避免交通事故的發生。
1 基本原理
車道偏離預警系統的基本原理是:系統通過攝像頭獲取道路信息,通過雷達等其它傳感器獲取車輛自身相關信息以及外界環境信息,同時獲取人機交互界面中由駕駛員所設置的參數信息,以這些信息作為基礎,進行車道偏離預警算法的決策,當發生偏離時,系統可通過聲音提示、LCD顯示器顯示警告信息等方式來警示駕駛員,使得駕駛員能夠及時調整車輛的行駛方向,避免交通事故的發生。其中車道線檢測是車道偏離預警系統中一個關鍵性問題。
2 車道偏離預警算法基本流程
車道偏離預警算法的思想是:通過對車輛前方視覺傳感器所拍攝的道路圖像進行中值濾波處理,以消除噪聲干擾,再對圖像進行邊緣提取和二值化處理,將車道標識線信息與道路背景信息相分離,然后對車道線進行識別,求取它的代表點,得到代表點序列后再對其進行修復,提取每個代表點序列的起始點、終止點,之后對間斷標識線進行擬合連接,將重構后的車道線顯示到輸入圖像上,最后根據偏離預警決策算法來判斷車輛當前是否發生偏離車道線的情況。該算法的基本流程圖如圖1所示:

圖1 車道偏離預警系統算法的基本流程
3 車道偏離預警算法處理過程
(1)道路圖像預處理
圖像預處理主要包括:中值濾波、邊緣提取以及二值化處理[2]。通過中值濾波處理使得由外部環境所引起的干擾噪聲得以消除或衰減;通過邊緣提取和二值化處理對車道標識線進行識別,將標志線與路面信息相分離,以便于下一步的操作。
①道路圖像中值濾波
中值濾波是一種既能去除噪聲又能保護目標邊界不被模糊的空域濾波法。其思想是:將每個像素點的灰度值用它鄰域移動窗口內的所有像素點的灰度值的中值來替代,可表示為:

②道路圖像二值化
灰度圖像其灰度級變化范圍為[0,255],本文選取與圖像平均灰度相關的值作為邊緣提取的分割閾值,對圖像進行二值化處理。設表示處像素點的灰度值,T表示臨界灰度值,則二值化處理可表示為式(b),這里選取作為臨界灰度值T。

(2)道路標志線的提取及擬合
道路圖像經預處理之后,得到道路標識線的二值化圖像。接下來任務是對二值化處理之后的圖像進行識別,提取每行圖像中車道線的代表點序列,對每個代表點序列的起始點和終止點進行搜尋記錄,根據記錄信息進行車道線的擬合,再將擬合之后的車道線反標回原輸入圖像中。
①代表點的選取
根據車道標識線在橫向上具有一定的寬度、在豎向上具有一定的長度這兩大形態特征,可以判定:經過預處理之后車道線不會為零零散散的孤立點。所以,該算法對每行圖像進行掃描,選出每行中連續點數大于2的像素點組成連續點組,對每一個符合條件的連續點組求取它的中間點將其作為該組的代表點。
②車道線起始點和終止點提取
道路標識線在縱向延伸表現為三種情況:豎直、右傾斜、左傾斜。故經過代表點選取后,連續兩行中的同一標識線也符合上述三種情況。因而,在進行終止點提取時,可運用這一規律進行代表點鏈碼的追蹤。

在搜索追蹤的過程中,凡是滿足條件的像素點,在被搜索之后,改變其灰度值,便于后續搜索過程中不會將它重復搜索;如果任何一方向均不滿足,則認為該點為終止點。當搜索到一條標識線的起始和終止點坐標后,便可以計算出這兩點間直線的斜率k。將每次搜索所得到的車道標識線鏈碼的起始點坐標(start_ i,start_j)、終止點坐標(end_i,end_j)、斜率k,以及本次搜索得到的標識線序號,存入對應的數組寄存器中。
③車道線的擬合
在汽車安全輔助駕駛中,車道標識線的擬合是一個至關重要的環節。目前,對于車道線的擬合方法有很多,本文采用遞歸二分折線擬合法對車道標識線進行擬合。由于道路圖像在縱向上的延伸形狀不定,這就使得標識線的曲線形狀也難以確定。為了能夠兼容各種車道標識線,在遞歸二分折線擬合法中,用平行于道路圖像橫向坐標的直線將圖像進行劃分,這樣便可得到多個劃分區域,在每個小區域內的曲線可以近似的用直線來替代。如此以來,一條曲線標識線便可以用一組折線來擬合出來。
對于劃分后子區域內的直線擬合,這里選取最小二乘曲線擬合算法來進行直線的擬合。其實現過程如下:
否則轉到下一步。
經過上述步驟得到標識線的擬合曲線,由于車道標識線存在虛線,或者是車道線檢測的時候本屬于同一標志線的縱向延伸的曲線因各種原因致使檢測結果為幾條縱向離散的線段,為了得到道路標識線的完整擬合,必須將這些本屬于同一條標識線的離散虛線段進行連接擬合。
對于虛線段的連接,主要從三個方面判斷它們是否歸屬于同一條標識線,第一點考慮兩條線段的斜率差,第二點看待合并的兩條直線之間的橫向距離,第三點考慮兩條直線的縱向間距。
④原圖上顯示擬合后的車道線
經車道標識線擬合之后,將擬合出來的曲線顯示在原視頻圖像上,給駕駛員直觀的視覺感受。具體實現方法就是根據每條擬合直線方程,在圖像上對應的行列上用醒目的顏色繪制出擬合之后的標識線。
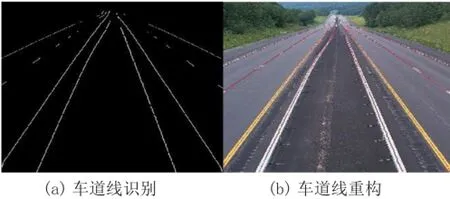
圖2 虛線段的連接示意圖
以上各步驟的處理結果如圖2所示,圖2 (a)是對車道線進行直線擬合后的效果圖,但還未進行虛線段的連接,圖2 (b)為擬合之后的車道線在輸入圖像上的重構。
(3)偏離預警
車道偏離預警采用CCP模型 (Car’s Current Position,車輛在車道中的當前位置),該模型根據車輛在車道中的位置進行車道偏離判決。假設車輛的中心位置與車道的中心之間的距離為,車輛自身的寬度為,車道的寬度為,且車輛與車道的方向大致平行,則此時車輛的前車輪相對于車道左右邊界的位置可表示為式(d):

在實際應用中,對于車輛在當前車道中的具體位置以及道路的寬度是依據CCD攝像頭自身的參數,及其安裝的位置、高度、方向等參數,再結合道路的具體參數信息進行獲取。
4 結束語
本文先介紹了車道偏離預警算法的基本流程,然后分步驟闡述了圖像預處理過程及仿真情況,道路標志線識別的處理過程及仿真結果,最后根據CPP模型進行車道偏離的預警。實驗表明,該方法能夠正確分析車道中的位置信息,當車輛偏離車道時及時給予報警。
[1] 董因平.高速汽車車道偏離預警系統的算法研究:[博士學位論文][D].吉林:吉林大學,2004.
[2] 江明,劉輝,黃歡.圖像二值化技術的研究[J].軟件導刊,2009.
[3] 阮秋琦,阮宇智等.數字圖象處理(第二版)[M].北京:電子工業出版社,2003.
[4] 許波文,張建明,劉志強.基于分段歸類擬合算法的車道線監測系統[J].計算機工程與設計,2009.
[5] Xun Dai,Anton Kummert,Su Birm Park,et al.A Warning Algorithm for Lane Departure Warning System[C]. Proc.IEEE Intelligent Vehicles Symposium,2009.
[6] 葛平淑.車道偏離預警視覺系統算法改進研究[D].吉林:吉林大學,2008.
蘇春莉,女,生于1977年,陜西省蒲城縣人,漢族,講師,碩士。研究方向:嵌入式開發、數字圖像處理。
由此可知,端口網絡等效電阻消耗的功率一般不等于端口網絡內部消耗的功率,因此當負載獲取最大功率時,電路的傳輸效率并不一定等于50%,一般小于50%。
5 結論
最大功率傳輸原理是電路理論中的重要定理,在教學設計過程中,注重教學方式方法更利于學生的學習掌握;在應用最大功率傳輸原理時,必須注意其使用的前提條件,否則可能得出錯誤結論。根據具體的電路求解最大功率的方法不盡相同。
參考文獻
[1] 邱關源 電路(第四版)[M]北京:高等教育出版社,2000
[2] 左全生.負載阻抗受限制情況下的最大功率傳輸的研究.常州工學院學報.2008.21(2)
[3] 張偉.張蛟龍 韓素敏.“電路”中最大功率傳輸定理的教學方法探討.科技信息.2003
[4] 白乃平.電工教材[M].西安:西安電子科技出版社,2011
[5] 馮志軍.項目課程課例開發的實踐與思考[J].中國職業技術教育,2010,(35)
[6] 劉秀成,黃松嶺,于歆杰,陸文娟.關于最大功率傳輸問題的討論[J].南京:電氣電子教學學報,2008,30(1)
[7] 呂偉鋒,董曉聰.電路分析實驗[M].北京:科學出版社,2010,5
[8] 王光義.實驗教學理念與創新能力培養[J].實驗室研究與探索,2008,27(8):76-78.
Research on Lane Departure Warning Algorithm
Suchunli,Limei
(Information Engineering Institute,Xi’an Eurasia University,Xi’an,710065,China)
This paper mainly do some research on the lane departure warning algorithm.Based on the basic flow algorithm,it mainly describes the image preprocessing,lane recognition and departure warning three steps.Experiments show that,this method can correctly analyze the lane in the position information,when thevehicle lane departure timely alarm.
Lane recognition;Image preprocessing;Deviation decision
陜西省科技廳自然科學基礎研究基金資助項目(No. 2012JM8027)