雙柔性空間機(jī)械臂動(dòng)力學(xué)建模與控制
2014-02-23 05:23:42楊永泰榮吉利李健劉賓胡成威
兵工學(xué)報(bào) 2014年7期
楊永泰,榮吉利,李健,劉賓,胡成威
(1.北京理工大學(xué) 宇航學(xué)院,北京100081;2.廣西科技大學(xué) 汽車與交通學(xué)院,廣西 柳州545006;3.中國空間技術(shù)研究院,北京100094)
0 引言
空間機(jī)械臂作為航天器上一種重要的工具,可以完成釋放、回收衛(wèi)星以及空間站的在軌裝配、維修等各種任務(wù),并可以作為航天員出艙工作的輔助工具,甚至替代航天員的部分工作,從而提高航天員的艙外工作能力及在軌操作的安全性[1]。空間機(jī)械臂的機(jī)械部分主要包括關(guān)節(jié)和臂桿。關(guān)節(jié)主要包括:電機(jī)、傳動(dòng)裝置、運(yùn)動(dòng)軸系、傳感器等;臂桿的制造往往采用輕質(zhì)材料,例如碳纖維等。關(guān)節(jié)柔性以及臂桿柔性,都是不可忽略的。為了研究空間機(jī)械臂的動(dòng)力學(xué)特性并且實(shí)現(xiàn)精確控制,建立包含關(guān)節(jié)柔性以及臂桿柔性的空間機(jī)械臂精確動(dòng)力學(xué)模型,具有十分重要的意義。
在機(jī)械臂柔性關(guān)節(jié)建模方面,Spong 等[2]首次對(duì)其進(jìn)行簡化,提出“轉(zhuǎn)子-扭簧系統(tǒng)”模型。在此基礎(chǔ)上,Bahrami 等[3]將關(guān)節(jié)假設(shè)為“線性扭簧-阻尼”模型。于登云等[1]對(duì)空間機(jī)械臂關(guān)節(jié)動(dòng)力學(xué)建模方法的發(fā)展過程和研究成果進(jìn)行了總結(jié)。在柔性臂桿建模方面,大多數(shù)研究者[4-5]均采用拉格朗日方程以及假設(shè)模態(tài)法進(jìn)行建模。但是,該方法首先需要通過計(jì)算臂桿的模態(tài),然后進(jìn)行模態(tài)截?cái)?并且,假設(shè)模態(tài)法僅僅適用于臂桿的小變形。將描述柔性構(gòu)件的絕對(duì)節(jié)點(diǎn)坐標(biāo)方法[6]與描述剛體的自然坐標(biāo)方法[7]相結(jié)合,可以形成研究剛-柔多體系統(tǒng)動(dòng)力學(xué)的絕對(duì)坐標(biāo)方法[8-9]。利用絕對(duì)坐標(biāo)方法推導(dǎo)得到的剛-柔多體系統(tǒng)動(dòng)力學(xué)方程的質(zhì)量矩陣為常數(shù)矩陣,不存在科氏力和離心力,并且還可以得到簡潔的系統(tǒng)約束方程表達(dá)式,不僅適用于柔性體的小變形問題,也能得到大變形的精確結(jié)果。
本文采用自然坐標(biāo)法對(duì)柔性關(guān)節(jié)進(jìn)行動(dòng)力學(xué)建模,采用絕對(duì)節(jié)點(diǎn)坐標(biāo)法對(duì)柔性臂桿進(jìn)行動(dòng)力學(xué)建模,最終得到了柔性關(guān)節(jié)柔性臂桿空間機(jī)械臂的動(dòng)力學(xué)方程,為指標(biāo)3 的微分代數(shù)方程組。采用5 次多項(xiàng)式對(duì)關(guān)節(jié)軌跡進(jìn)行規(guī)劃,并通過逆動(dòng)力學(xué)得到關(guān)節(jié)驅(qū)動(dòng)力矩,將其作為前饋輸入;采用PID 控制策略作為反饋輸入,這就形成了前饋-反饋聯(lián)合控制策略。在二連桿柔性關(guān)節(jié)柔性桿機(jī)械臂上進(jìn)行仿真,驗(yàn)證了該控制策略的有效性。
1 機(jī)械臂動(dòng)力學(xué)建模
如圖1 所示,為二連桿柔性關(guān)節(jié)柔性桿機(jī)械臂示意圖,包含2 個(gè)關(guān)節(jié)和2 個(gè)臂桿。
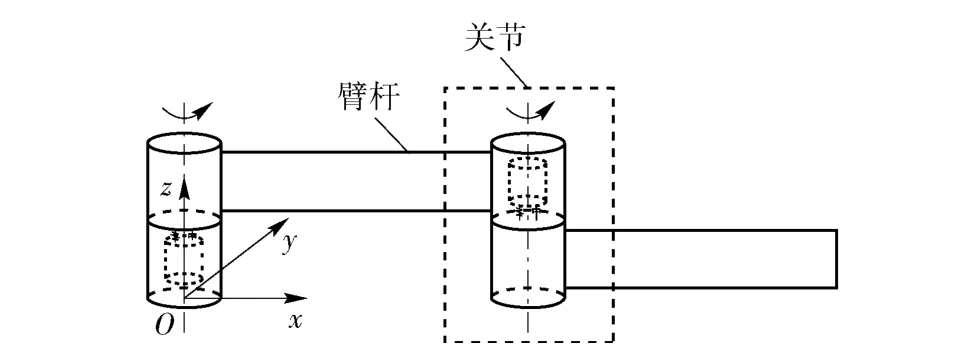
圖1 二連桿柔性機(jī)械臂Fig.1 Two-link flexible manipulator
自然坐標(biāo)法中存在多種不同的廣義坐標(biāo)選取方法[7]。如圖2 所示,選取剛體上2 個(gè)固定點(diǎn)的位置矢量和2 個(gè)單位矢量作為廣義坐標(biāo),稱之為“兩點(diǎn)兩矢”坐標(biāo)形式,這是最經(jīng)典的自然坐標(biāo)形式,該剛體具有12 個(gè)廣義坐標(biāo):

式中:ri、rj分別表示剛體上i 點(diǎn)、j 點(diǎn)的位置矢量;u、v 分別表示固結(jié)于剛體上的單位矢量。
剛體上任意一點(diǎn)P 的位置矢量可表示為

式中:C=[(1 -c1)I3c1I3c2I3c3I3],為單元的形函數(shù),c1、c2、c3為局部坐標(biāo)分量,I3為3 階單位矩陣。
通過虛功原理,可得到自然坐標(biāo)法(NCF)描述的剛體常數(shù)質(zhì)量矩陣:

式中:ρ 表示剛體的密度;V 表示剛體的體積。
采用自然坐標(biāo)的“兩點(diǎn)兩矢”經(jīng)典坐標(biāo)建立柔性關(guān)節(jié)動(dòng)力學(xué)模型。關(guān)節(jié)包含2 個(gè)殼體和1 個(gè)電機(jī)轉(zhuǎn)子,它們共軸;并且將電機(jī)轉(zhuǎn)子和殼體簡化為“扭簧-阻尼”系統(tǒng)。
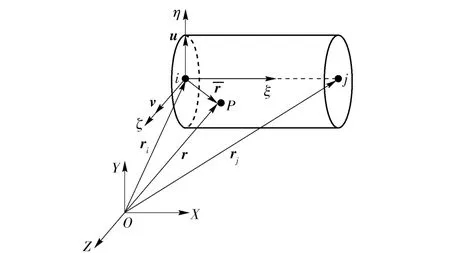
圖2 自然坐標(biāo)描述的空間剛體Fig.2 Space rigid body described by NCF
如圖3 所示,在電機(jī)轉(zhuǎn)子和電機(jī)殼體上分別建立NCF 坐標(biāo),并用qm和qs分別表示電機(jī)轉(zhuǎn)子和電機(jī)殼體的NCF 坐標(biāo)。由qm和qs可得到電機(jī)轉(zhuǎn)子和關(guān)節(jié)殼體的轉(zhuǎn)角θm、θs,及其角速度電機(jī)通電后驅(qū)動(dòng),帶動(dòng)關(guān)節(jié)殼體轉(zhuǎn)動(dòng),關(guān)節(jié)殼體受到的力矩為

式中:Kt為扭轉(zhuǎn)剛度系數(shù);Kd為阻尼系數(shù);Kt、Kd一般通過實(shí)驗(yàn)手段測得。本文暫不考慮電機(jī)轉(zhuǎn)子所受摩擦力等。
電機(jī)轉(zhuǎn)子受到的力矩為

式中:τ 為電機(jī)轉(zhuǎn)子受到的驅(qū)動(dòng)力矩,與電流大小有關(guān)。
面對(duì)這份要求和重?fù)?dān),研究院黨委結(jié)合所面臨的工作環(huán)境,由班子成員帶隊(duì)深入各研究所與機(jī)關(guān)科室,開展了“訪基層、講形勢、聚人心、促工作”集中宣講,宣講形勢任務(wù)和上級(jí)政策要求,了解職工思想動(dòng)態(tài);編發(fā)了形勢任務(wù)教育宣傳材料,開展“跨越重大關(guān)口,決勝扭虧為盈”形勢任務(wù)教育;使大家充分認(rèn)清形勢,明確研究院在分公司的定位,增強(qiáng)榮譽(yù)感,強(qiáng)化擔(dān)當(dāng)意識(shí),在全院干部員工心目中樹立和固化“公司增效責(zé)任在我,公司發(fā)展我來擔(dān)責(zé)”的責(zé)任心,鼓勵(lì)員工以不服輸、爭口氣的勁頭,把基礎(chǔ)研究工作做得更扎實(shí)、更細(xì)致、更務(wù)實(shí),努力打好翻身仗。
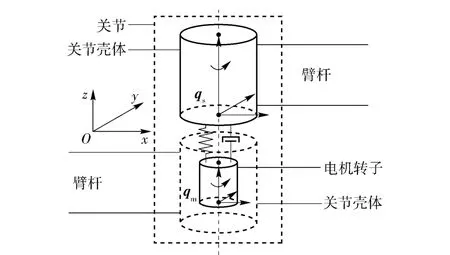
圖3 自然坐標(biāo)法描述的柔性關(guān)節(jié)Fig.3 Flexible joint described by NCF
柔性臂桿采用Shabana 等[10]與Yakoub 等[11]提出的基于絕對(duì)節(jié)點(diǎn)坐標(biāo)的三維二節(jié)點(diǎn)梁單元進(jìn)行離散,如圖4 所示。該梁單元有2 個(gè)節(jié)點(diǎn),每個(gè)節(jié)點(diǎn)上有1 個(gè)位置矢量和3 個(gè)斜率矢量,單元共有24 個(gè)廣義坐標(biāo):

式中:ri、rj分別表示i 點(diǎn)、j 點(diǎn)的位置矢量;ri,x、ri,y、ri,z分別表示ri對(duì)x、y、z 的偏導(dǎo);rj,x、rj,y、rj,z分別表示rj對(duì)x、y、z 的偏導(dǎo);x、y、z 分別為單元的局部坐標(biāo)。
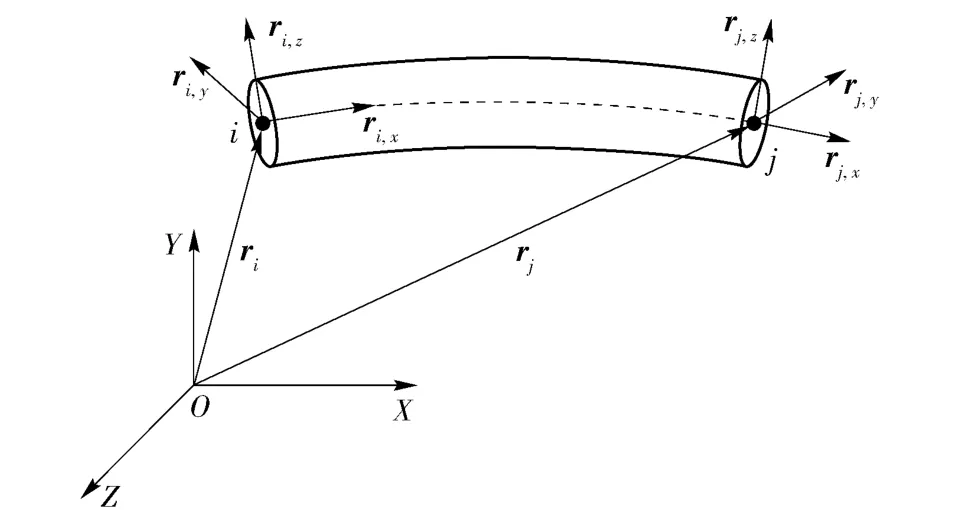
圖4 絕對(duì)節(jié)點(diǎn)坐標(biāo)法描述的三維二節(jié)點(diǎn)梁單元Fig.4 Three-dimensional beam element of two nodes described by ANCF
單元上任意一點(diǎn)P 的位置矢量為

S 為單元的形函數(shù):

式中:I3為3 階單位矩陣;s1=1 -3ξ2+2ξ3,s2=ξ -2ξ2+ξ3,s3=η -ξη,s4= ζ - ξζ,s5=3ξ2-2ξ3,s6=-ξ2+ξ3,s7=ξη,s8=ξζ,ξ =x/l,η =y/l,ζ =z/l,x∈[0 l],l 為單元初始長度。
采用自然坐標(biāo)法以及絕對(duì)節(jié)點(diǎn)坐標(biāo)法建立的剛?cè)狁詈隙囿w系統(tǒng)動(dòng)力學(xué)方程為指標(biāo)3 的微分代數(shù)方程組:

式中:M 為系統(tǒng)質(zhì)量矩陣;q 為系統(tǒng)廣義坐標(biāo);C 為系統(tǒng)約束方程;Cq為系統(tǒng)約束方程對(duì)廣義坐標(biāo)的Jacobi 矩陣;λ 為拉格朗日乘子;Q 為系統(tǒng)廣義外力;F 為系統(tǒng)廣義彈性力。絕對(duì)節(jié)點(diǎn)坐標(biāo)法描述的三維二節(jié)點(diǎn)梁單元彈性力及其Jacobi 的計(jì)算,參見文獻(xiàn)[12 -13]。上述各項(xiàng)按照傳統(tǒng)有限元方法的單元組裝策略進(jìn)行單元組裝。
2 前饋-反饋控制策略
在工程上,往往采用多項(xiàng)式對(duì)關(guān)節(jié)軌跡進(jìn)行插值,包括3 次多項(xiàng)式以及5 次多項(xiàng)式等。若關(guān)節(jié)的位置速度 以及加速度 的初始狀態(tài)(t =0)以及結(jié)束狀態(tài)(t=tf)為
式中:θ0、θf分別表示關(guān)節(jié)的初始角度、最終角度;tf表示運(yùn)動(dòng)規(guī)劃時(shí)間。
為滿足上述6 個(gè)邊界條件,采用5 次多項(xiàng)式對(duì)每個(gè)關(guān)節(jié)軌跡進(jìn)行規(guī)劃:

由(10)式描述的6 個(gè)邊界條件,可惟一確定多項(xiàng)式系數(shù)ai(i=0,1,…,5);經(jīng)過整理,最終得到關(guān)節(jié)軌跡為

對(duì)(12)式進(jìn)行求導(dǎo),可得到關(guān)節(jié)速度以及加速度:
在工程實(shí)際中,關(guān)節(jié)的最大速度是受到限制的。因此,在確定了關(guān)節(jié)的初始角度θ0以及最終角度θf后,應(yīng)適當(dāng)?shù)剡x擇規(guī)劃時(shí)間tf,以保證關(guān)節(jié)的最大角速度不超過規(guī)定值。
由規(guī)劃好的關(guān)節(jié)軌跡,根據(jù)逆動(dòng)力學(xué),得到各個(gè)關(guān)節(jié)的驅(qū)動(dòng)力矩,作為前饋輸入;采用PID 控制策略作為反饋控制,形成前饋-反饋聯(lián)合控制策略。關(guān)節(jié)控制器設(shè)計(jì)如圖5 所示。

圖5 前饋-反饋聯(lián)合控制策略Fig.5 Union control scheme of feedforward-feedback
3 數(shù)值仿真
如圖1 所示的二連桿機(jī)械臂,忽略重力影響,并假設(shè)基座的位置和姿態(tài)都是固定不變的。初始時(shí)刻以及結(jié)束時(shí)刻,關(guān)節(jié)的速度以及加速度均為0,關(guān)節(jié)角度分別為Θ0=[0° 0°]T,Θtf=[5° 10°]T.
臂桿均為空心圓柱,長度均為L =3.5 m,內(nèi)徑r=6 cm,外徑R=8 cm;材料均為碳纖維材料,密度ρ=2.0 ×103kg/m3,彈性模量E =80 GPa,泊松比ν=0.3;關(guān)節(jié)剛度系數(shù)均為K=1.2 ×105N·m/(°);關(guān)節(jié)阻尼影響較小,暫不考慮;規(guī)劃時(shí)間tf分別取3 s、4 s、6 s 以及9 s 四種情況,仿真時(shí)間均設(shè)置為T=12 s.

圖6 末端點(diǎn)的X 方向位移Fig.6 Displacement in X-direction of endpoint
圖6、圖7 分別為3 s、4 s、6 s 以及9 s 四種規(guī)劃時(shí)間情況下,機(jī)械臂末端點(diǎn)的X 方向位移、Y 方向位移。由圖可以看出,末端點(diǎn)能在規(guī)劃時(shí)間內(nèi),運(yùn)動(dòng)至指定的目標(biāo)位置,說明該控制策略能很好地實(shí)現(xiàn)軌跡跟蹤控制。但是由于關(guān)節(jié)柔性以及臂桿柔性的客觀存在,末端點(diǎn)在運(yùn)動(dòng)過程中產(chǎn)生振動(dòng)現(xiàn)象,運(yùn)動(dòng)至目標(biāo)位置后,殘余振動(dòng)將持續(xù)。
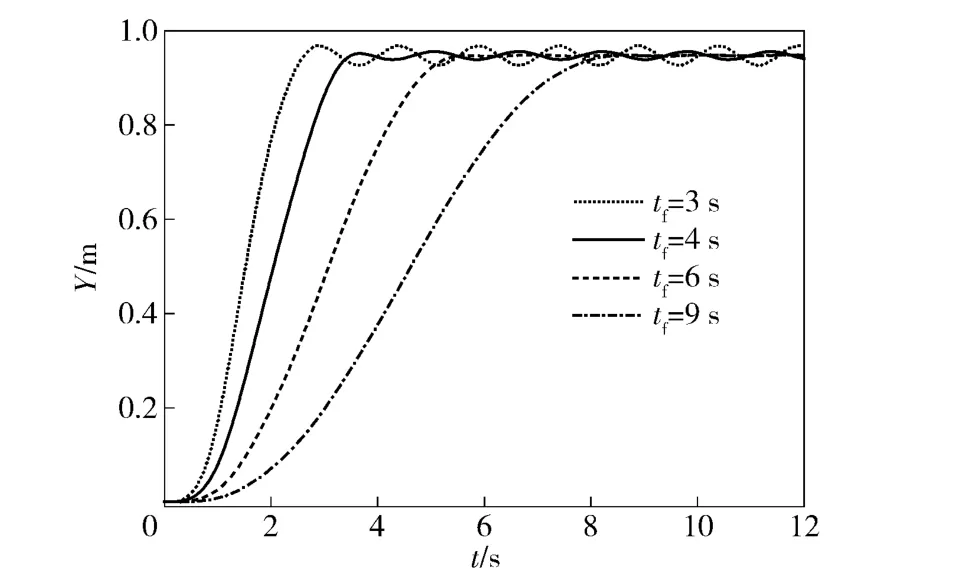
圖7 末端點(diǎn)的Y 方向位移Fig.7 Displacement in Y-direction of endpoint
圖8為末端點(diǎn)的振動(dòng)幅值δ,圖9、圖10 分別為振動(dòng)幅值在X 方向、Y 方向的分量δX、δY. 由圖可以看出,規(guī)劃時(shí)間tf=3 s 的情況下,末端點(diǎn)運(yùn)動(dòng)至指定的目標(biāo)位置,但是,運(yùn)動(dòng)過程中出現(xiàn)較大的振動(dòng),并且運(yùn)動(dòng)結(jié)束后仍有較大的殘余振動(dòng)。這是由于規(guī)劃時(shí)間較短,而規(guī)劃時(shí)間又是前饋輸入的重要因素,一旦引起振動(dòng),比較難以消除。隨著規(guī)劃時(shí)間的增加,運(yùn)動(dòng)過程以及運(yùn)動(dòng)結(jié)束后,振動(dòng)的幅值越來越小,而且頻率也越來越低。當(dāng)規(guī)劃時(shí)間tf=9 s 時(shí),末端點(diǎn)的振動(dòng)相比于規(guī)劃時(shí)間tf=3 s 有了非常明顯的減弱,振動(dòng)幅值由20.4 mm 減弱至2.7 mm,而振動(dòng)頻率也有明顯的降低。這說明規(guī)劃時(shí)間作為前饋輸入的一項(xiàng)重要因素,在工程實(shí)際允許的條件下,選擇合適規(guī)劃時(shí)間,能有效地抑制住機(jī)械臂的振動(dòng)。
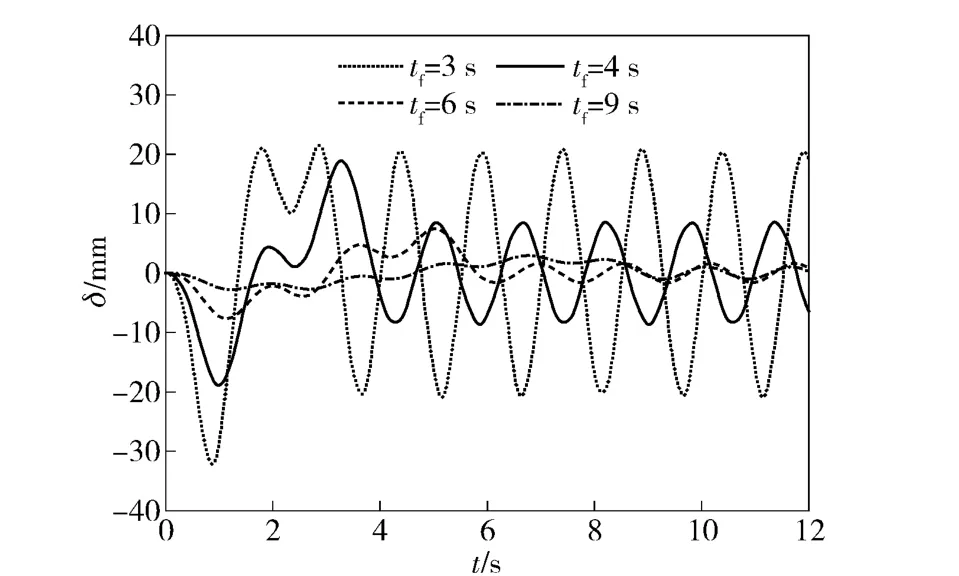
圖8 末端點(diǎn)的振動(dòng)幅值Fig.8 Amplitude of vibration at endpoint
4 結(jié)論
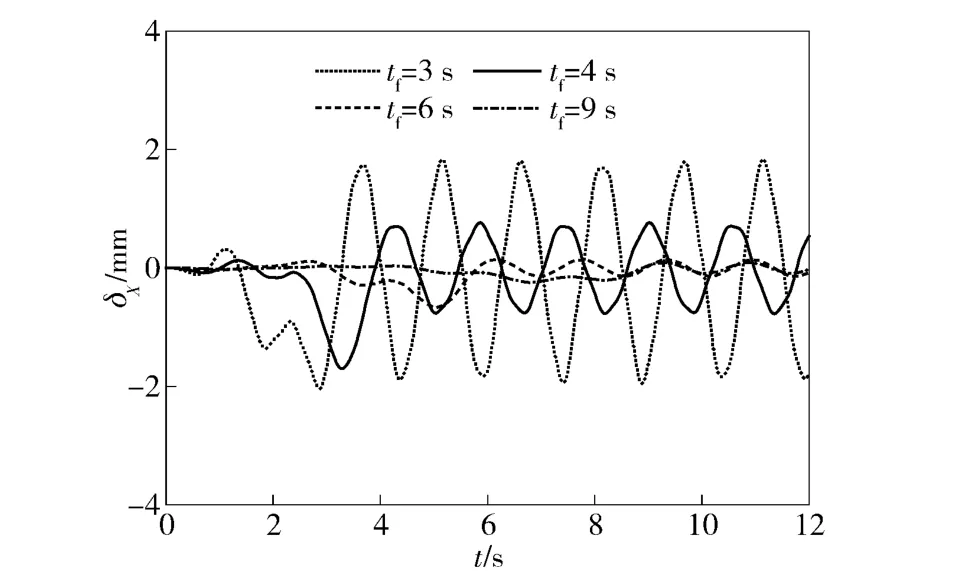
圖9 末端點(diǎn)的X 方向振動(dòng)分量Fig.9 Vibration in X-direction of endpoint
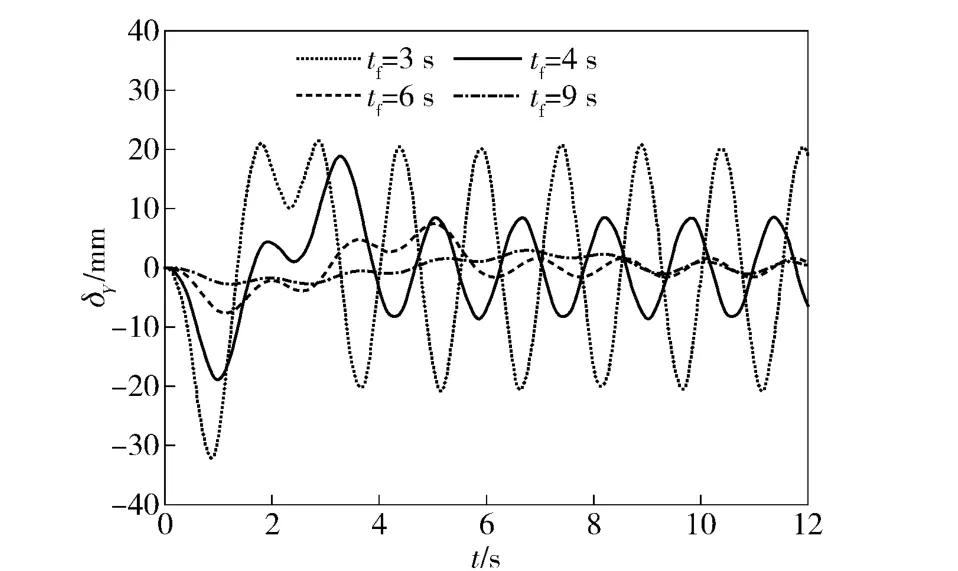
圖10 末端點(diǎn)的Y 方向振動(dòng)分量Fig.10 Vibration in Y-direction of endpoint
本文采用自然坐標(biāo)法對(duì)柔性關(guān)節(jié)進(jìn)行動(dòng)力學(xué)建模,采用絕對(duì)節(jié)點(diǎn)坐標(biāo)法對(duì)柔性臂桿進(jìn)行動(dòng)力學(xué)建模,最終得到了雙柔性機(jī)械臂的動(dòng)力學(xué)方程,為指標(biāo)3 的微分代數(shù)方程組。既考慮了關(guān)節(jié)柔性,又考慮了臂桿的柔性,動(dòng)力學(xué)模型更精確;相比于僅適用于臂桿小變形的假設(shè)模態(tài)法,該方法不僅適用于小變形問題,也能精確描述大變形問題。采用5 次多項(xiàng)式對(duì)關(guān)節(jié)軌跡進(jìn)行規(guī)劃,并通過逆動(dòng)力學(xué)得到關(guān)節(jié)驅(qū)動(dòng)力矩,將其作為前饋輸入;采用PID 控制策略作為反饋輸入,這就形成了前饋-反饋聯(lián)合控制策略。在二連桿雙柔性機(jī)械臂上進(jìn)行數(shù)值仿真,仿真結(jié)果表明:該前饋-反饋控制策略能很好地實(shí)現(xiàn)軌跡跟蹤控制;軌跡規(guī)劃時(shí)間作為前饋輸入的一項(xiàng)重要因素,對(duì)機(jī)械臂的振動(dòng)影響較大,選擇適當(dāng)?shù)囊?guī)劃時(shí)間,能顯著地減弱機(jī)械臂的振動(dòng)。
References)
[1]于登云,潘博,孫京. 空間機(jī)械臂關(guān)節(jié)動(dòng)力學(xué)建模與分析的研究進(jìn)展[J]. 航天器工程,2010,19(2):1 -10.YU Deng-yun,PAN Bo,SUN Jing. A literature review on dynamic modeling and analysis of the joints in space manipulator[J].Spacecraft Engineering,2010,19(2):1 -10. (in Chinese)
[2]Spong M W. Modeling and control of elastic joint robots[J]. Journal of Dynamic Systems,Measurement and Control,1987,109(1):310 -319.
[3]Bahrami M,Rahi A. Tip dynamic response of elastic joint manipulators subjected to a stochastic base excitation[J]. JSME International Journal:Series C,2003,46(4):1502 -1508.
[4]戈新生,崔瑋,趙秋玲. 剛?cè)嵝择詈蠙C(jī)械臂軌跡跟蹤與振動(dòng)抑制[J]. 工程力學(xué),2005,22(6):188 -191.GE Xin-sheng,CUI Wei,ZHAO Qiu-ling. Trajectory tracking control and vibration suppression of rigid flexible manipulators[J].Engineering Mechanics,2005,22(6):188 -191. (in Chinese)
[5]梁捷,陳力. 柔性空間機(jī)械臂末端運(yùn)動(dòng)及柔性振動(dòng)的模糊自適應(yīng)補(bǔ)償控制[J]. 兵工學(xué)報(bào),2011,32(1):45 -57.LIANG Jie,CHEN Li. Fuzzy logic adaptive compensation control of end-effect motion and flexible vibration for space-based flexible manipulator[J]. Acta Armamentarii,2011,32(1):45 -57. (in Chinese)
[6]Shabana A A. An absolute nodal coordinates formulation for the large rotation and deformation analysis of flexible bodies,No.MBS96-1-UIC[R]. US:University of Illinois at Chicago,1996.
[7]García De Jalón J,Bayo E. Kinematic and dynamic simulation of multibody systems:the real-time challenge[M]. New York:Springer,1994.
[8]García-Vallejo D,Escalona J L,Mayo J,et al. Describing rigidflexible multibody system using absolute coordinates[J]. Nonlinear Dynamics,2003,34:75 -94.
[9]García-Vallejo D,Mayo J,Escalona J L,et al. Three-dimensional formulation of rigid-flexible multibody systems with flexible beam elements[J]. Multibody System Dynamics,2008,20(1):1 -28.
[10]Shabana A A,Yakoub R Y. Three dimensional absolute nodal coordinate formulation for beam elements:theory[J]. ASME Journal of Mechanical Design,2001,123:606 -613.
[11]Yakoub R Y,Shabana A A. Three dimensional absolute nodal coordinate formulation for beam elements:implementation and applications[J]. ASME Journal of Mechanical Design,2001,123:614 -621.
[12]García-Vallejo D,Mayo J,Escalona J L,et al. Efficient evaluation of the elastic forces and the Jacobian in the absolute nodal coordinate formulation[J]. Nonlinear Dynamics,2004,35:313-329.
[13]劉鋮,田強(qiáng),胡海巖. 基于絕對(duì)節(jié)點(diǎn)坐標(biāo)的多柔體系統(tǒng)動(dòng)力學(xué)高效計(jì)算方法[J]. 力學(xué)學(xué)報(bào),2010,42(6):1197 -1205.LIU Cheng,TIAN Qiang,HU Hai-yan. Efficient computational method for dynamics of flexible multibody systems based on absolute nodal coordinate[J]. Chinese Journal of Theoretical and Applied Mechanics,2010,42(6):1197 -1205. (in Chinese)
[14]Arnold M,Brüls O. Convergence of the generalized-a scheme for constrained mechanical systems[J]. Multibody System Dynamics,2007,18:185 -202.
[15]Bottasso C L,Dopico D,Trainelli L. On the optimal scaling of index three DAEs in multibody dynamics[J]. Multibody System Dynamics,2008,19(1):3 -20.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
能源工程(2020年6期)2021-01-26 00:55:22
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26