線導魚雷導引方法的組合使用策略研究
2014-02-27 06:23:58魏玉華王凱帥
水下無人系統學報 2014年3期
關鍵詞:方法
魏玉華, 王凱帥
線導魚雷導引方法的組合使用策略研究
魏玉華1, 王凱帥2
(1. 海軍駐北京地區武備配套軍事代表室, 北京, 100082; 2. 中國船舶系統工程研究院, 北京, 100094)
單一線導導引方法不能發揮魚雷的最大作戰效能, 為解決這一問題, 根據魚雷攻擊各階段的線導導引目的, 提出了線導導引方法組合策略及對其使用的時機、條件、信息以及建模的各種需求, 并通過仿真試驗對組合使用的攻擊效果進行了驗證, 對線導魚雷攻擊機動目標導引控制方法研究具有一定參考價值。
線導魚雷; 導引方法; 組合使用策略
0 引言
線導魚雷導引方法主要包括現在方位導引、修正方位導引、前置點導引[1-4], 從計算原理上一般認為分為2類, 一類是“一線法”, 武器系統在線導導引過程中, 利用魚雷遙測位置信息、目標現時方位或滯后方位信息, 周期性將魚雷形心導引到該方位線上; 一類是“一點法”, 在線導導引過程中, 利用魚雷遙測位置信息, 目標方位、速度、航向、距離運動要素信息, 周期性將魚雷形心導引到雷目相遇點上。
線導導引方法原理的不同, 決定了其使用時機、使用效果、信息需求的不同, 因此有必要通過對各種導引方法的使用條件、使用效果進行分析, 提出多種導引方法的組合使用策略, 從而揚長避短, 發揮魚雷武器的最大作戰效能[5]。
1 線導魚雷導引方法原理及特點
1.1 現在方位導引
現在方位導引方法的原理是周期性的將魚雷導引到距離目標方位線一定距離上, 僅依賴目標方位、估距信息, 對目標運動要素的需求較低, 但線導魚雷出管后, 魚雷相對目標距離本艇近、噪聲高, 魚雷噪音遮蓋目標噪音, 一方面本艇不能對目標進行跟蹤, 線導只能采用推算方位進行導引, 推算時間越長, 推算方位與目標真實方位偏差越大, 將導致導引效果下降; 另一方面, 魚雷噪音遮蓋目標噪音后, 潛艇不能繼續進行目標運動要素解算, 從而不利于接敵導引, 耗費魚雷航程, 不能根據目標運動參數合理使用適用的魚雷速制及自導方式, 不利于發揮武器最大作戰效能; 再者, 魚雷噪音遮蓋目標后, 不利于本艇及時識別目標機動, 從而不能及時采用反對抗導引策略, 影響線導魚雷對機動目標的打擊效果。其導引示意圖見圖1。
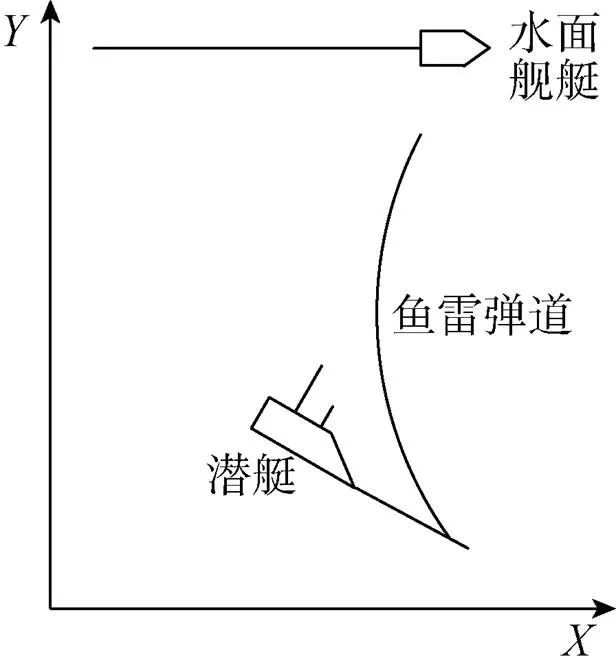
圖1 現在方位導引示意圖
1.2 修正方位導引
為了克服現在方位導引魚雷噪音遮蓋目標、前置點導引對目標運動要素準確度要求高的問題, 修正方位導引采用偏離方位導引策略, 即在線導導引的中前期始終將魚雷導引到滯后目標方位線一定距離上, 以使魚雷方位與目標方位之間有一定滯后角, 從而保證魚雷噪音不遮蓋目標, 利于本艇跟蹤目標完成線導魚雷導引和目標運動要素解算。其缺點是, 由于魚雷總是滯后目標現在方位一定角度, 從而耗費魚雷航程, 特別是在修正方位導引期間控制魚雷進行變速后, 修正滯后量和修正距離均增加, 不利于魚雷接敵, 浪費魚雷航程甚至導致魚雷穿越目標航跡線。其導引示意圖見圖2。
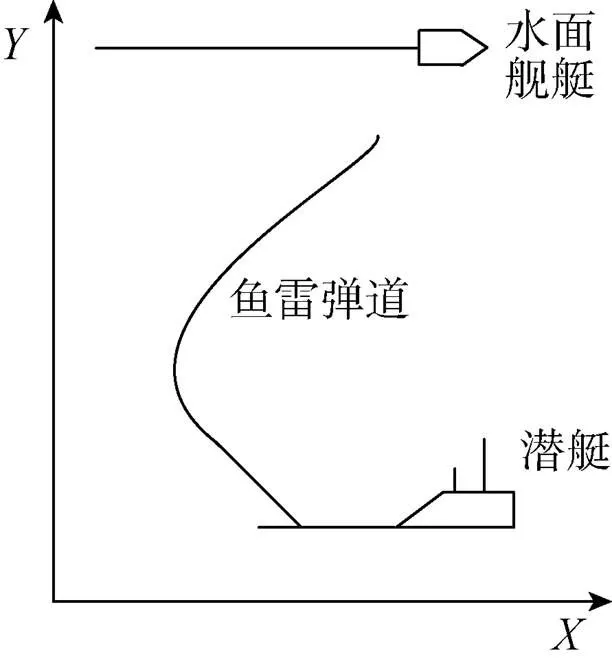
圖2 修正方位導引示意圖
1.3 前置點導引
前置點導引方法的原理是, 在解算出目標運動要素基礎上, 采用解相遇原理控制魚雷接敵攻擊, 其優點首先是節約魚雷航程, 另外, 魚雷相對目標方位有一定提前角, 從而魚雷出管航行一段時間后, 魚雷與目標分離, 利于潛艇對目標跟蹤, 再次由于尾流自導魚雷有進入目標尾流角度的要求, 前置點導引方法可根據雷目相對態勢自動進行調整, 以滿足尾流自導魚雷進入角度的要求。其缺點是需要準確的目標運動要素, 在目標機動后, 由于本艇不能短時間內解算出目標運動要素, 從而不能繼續采用該方法進行導引, 從而對機動目標攻擊適應性較差[6-7]; 其次對于遠距離目標, 由于目標運動要素解算誤差較大, 因此在遠距離條件下前置點導引攻擊效果不如方位導引方法。其導引示意圖(線導+尾流占位攻擊)見圖3。

圖3 前置點導引示意圖
2 線導導引方法組合使用策略及對目標信息需求
2.1 組合使用原則
潛艇發控導引線導魚雷攻擊目標的過程是, 先敵發現、先敵攻擊, 不需要解算高精度的目標運動要素, 僅需要估計目標的概略參數即可先敵攻擊, 在線導魚雷導引過程中, 再精確解算目標運動要素, 根據敵我態勢變化采用適用導引方法控制魚雷攻擊目標。
因此線導導引過程應分為2個階段: 接敵階段和攻擊階段。在魚雷接敵階段, 線導導引的目的應是控制魚雷以最佳隱蔽速度、最短航程接近目標區域, 同時需要保證魚雷不遮蓋目標, 發射艇能夠跟蹤目標, 適應目標機動情況改變導引策略; 在魚雷攻擊階段, 應是魚雷自導開機后的搜索、追蹤、命中階段, 該階段的導引目的是控制魚雷盡快發現目標, 而不保證雷目分辨。
2.2 組合使用策略及信息需求
2.2.1 信息需求
綜上所述, 為實現線導導引方法組合使用, 需建立線導導引方法切換模型、自導開機模型、雷目分辨預計模型、目標概略參數估計模型等, 其主要功能如下。
自導開機模型: 應根據目標概略參數、魚雷位置信息, 考慮魚雷自導作用距離、雷目距離、魚雷與目標垂距等因素, 計算最佳開機時機, 保證魚雷不穿越航跡、遠距離發現目標。
線導導引方法切換模型: 應根據接敵階段和攻擊階段, 按照雷目分辨、魚雷攻擊的需求側重點不同, 以及魚雷自導方式的使用需求, 選擇最佳導引方法。
雷目分辨預計模型: 應根據目標概略運動參數以及目標特征信息、聲納分辨能力、魚雷不同速制噪音特性, 考慮魚雷隱蔽性、雷目分辨要求, 在不同態勢下預計可用魚雷速制及雷目分辨方位差需求。
目標概略參數估計模型: 魚雷發射前, 應能夠在短時間內估計目標的概略速度、航向、距離信息, 在線導導引階段, 在目標機動后, 能夠短時間內判斷目標機動, 并能夠估計目標的概略速度和航向信息, 作為導引方法控制、魚雷速制控制、自導方式控制的依據。
2.2.2 組合使用策略
1) 魚雷發射前階段
a. 本階段應確定線導魚雷出管后接敵階段的導引方法和魚雷速制, 考慮目標機動因素, 前置點導引方法不能適應攻擊機動目標要求, 應以方位導引和修正方位導引為主。
b. 首先應以目標概略要素、魚雷最大航程為輸入, 通過魚雷航程預計, 選擇魚雷能夠追上目標的最小速度為魚雷接敵速度。
c. 判斷目標距離, 若為近距離目標(小于30 cab), 鑒于修正方位導引方法導引魚雷始終偏離目標方位線的特點, 不適用對近距離目標攻擊, 應選擇方位導引方法。
d. 若為遠距離目標(大于30 cab), 以目標噪聲譜級、魚雷噪聲譜級(通過魚雷速度預估)、方位導引時魚雷和目標方位差為輸入, 通過雷目分辨預計模型計算, 對線導導引過程中的雷目分辨情況進行預判, 若魚雷出管一定時間內(如3 min), 聲納能夠分辨魚雷和目標則選擇方位導引方法, 否則選擇修正方位導引方法。
2) 線導魚雷接敵階段(自導開機前階段)
a. 本階段線導導引重點是根據目標機動情況, 進行變速導引、導引方法組合導引, 保證聲納能夠分辨魚雷和目標, 線導導引魚雷接近目標區域; 同時實時計算雷目距離, 適時發出自導開機遙控指令。
b. 利用目標概略參數估計算法, 結合聲納噪聲聽測情況, 實時檢測目標機動情況。
c. 當識別目標機動后, 以目標噪聲譜級、魚雷噪聲譜級為輸入條件, 通過雷目分辨預計模型, 計算滿足聲納分辨要求的魚雷和目標的方位差要求, 當現在方位導引雷目方位差不能滿足要求時, 轉換線導導引方法為修正方位導引, 同時重新計算并設定修正方位導引初始偏離角度和修正導引距離。
d. 當識別目標機動后, 在重新確定導引方法保持本艇聲納跟蹤目標的同時, 重新估算目標運動參數, 然后通過魚雷航程預計, 選擇魚雷能夠追上目標的最小速度為魚雷接敵速度; 在重新選擇魚雷速制后, 按照步驟c重新選擇線導導引方法, 或修改修正方位導引初始偏離角和修正導引距離。
e. 在線導導引魚雷接敵過程中, 周期性計算雷目距離, 考慮魚雷自導作用距離、要素估算誤差等因素, 當雷目距離滿足要求時向魚雷發出自導開機遙控指令。
3) 魚雷攻擊階段(自導開機后階段)
a. 本階段重點是導引魚雷發現目標, 因此應以方位導引和前置點導引為主。
b. 若自導方式為被動聲自導, 則選擇方位導引, 若自導方式為尾流自導或主動聲自導, 對魚雷命中角進行預估, 若魚雷命中角能滿足魚雷使用要求時, 可繼續采用方位導引方法, 若預估魚雷命中角不能滿足魚雷使用要求時, 選擇前置點導引方法導引魚雷占位, 以適當命中角攻擊目標。
c. 當判斷魚雷穿越目標航跡未發現目標或未進入目標尾流時, 則視情轉入人工導引或其他導引方法導引魚雷繼續攻擊。
2.3 組合使用攻擊效果舉例
假設本艇速度4 kn, 本艇航向0°, 目標速度14 kn, 敵舷角50°~120°, 魚雷射距4 ~14 km, 假設魚雷低速30 kn、高速50 kn, 考慮聲納探測精度、本艇導航精度、魚雷航行精度等因素, 采用蒙特卡羅方法進行魚雷攻擊效果仿真計算, 修正方位轉方位導引+尾流自導與方位導引+尾流自導攻擊效果對比見表1, 表中概率為修正方位導引攻擊概率–方位導引攻擊概率的差值。

表1 不同方位導引+尾流自導攻擊效果對比
通過攻擊效果對比可發現, 當魚雷射距4 km時, 由于修正方位導引魚雷滯后目標方位線一定角度的原因, 魚雷自導開機時距離目標較遠導致進入尾流距離偏離目標有效尾流區域, 方位導引攻擊效果明顯優于修正方位轉方位導引; 射距6~10 km、敵舷角50°~110°時, 盡管方位導引攻擊過程中魚雷噪聲遮蓋目標噪聲, 采用目標方位序列推算目標方位進行導引, 由于攻擊距離較近, 推算時間短, 從而用于方位導引的推算目標方位與目標真實方位差較小, 方位導引與修正方位轉方位導引攻擊效果相當; 射距6~10 km、敵舷角120°, 射距12~14 km、敵舷角50°~120°時, 由于推算時間長, 從而用于方位導引的推算目標方位與目標真實方位差較大, 而修正方位轉方位導引能夠保證聲納跟蹤目標, 從而修正方位轉方位導引攻擊效果明顯優于方位導引。
3 結束語
通過對魚雷線導導引方法的使用特性分析, 根據線導魚雷作戰使用需求, 提出了線導導引方法組合使用策略, 同時提出了實現組合導引的建模需求, 并舉例說明了組合導引對魚雷攻擊效果的影響, 從而為線導魚雷攻擊機動目標導引控制方法研究提供了思路。
[1] 趙正業. 潛艇火控原理[M]. 北京: 國防工業出版社, 2000.
[2] 孟慶玉, 張靜遠, 宋保維. 魚雷作戰效能分析[M]. 北京: 國防工業出版社, 2003.
[3] 徐敦滋, 王新遠, 王文友. 線導魚雷作戰使用方法研究. 魚雷技術, 2002, 10(1): 39-43.
[4] 王新遠. 改進的線導魚雷方位和前置點導引方法[J]. 魚雷技術, 2007, 15(3): 31-33.Wang Xin-yuan. Improved Azimuth and Pre-point Guidance Methods for Wire-guidance Torpedo[J]. Torpedo Technology, 2007, 15(3): 31-33.
[5] 宋明玉. 基于模糊控制的線導魚雷組合導引方法[J]. 魚雷技術, 2008, 16(3): 25-26.Song Ming-yu. An Integrated Guidance Law Based on Fuzzy Control for Wire-guidance Torpedo[J]. Torpedo Technology, 2008, 16(3): 25-26.
[6] 高東華, 章新華. 艦艇規避策略對魚雷捕獲概率影響的仿真研究[J], 系統仿真學報, 2001, 13(3): 348-349.Gao Dong-hua, Zhang Xin-hua. Simulations of the Effect of the Decision of Vessel Evasion on Torpedo Capture Probability[J]. Journal of System Simulation, 2001, 13(3): 348-349.
[7] 林平, 徐海剛. 水聲對抗線導魚雷中的艦艇規避航向優化策略分析[J]. 軍事運籌與系統工程, 2007, 21(1): 55- 58.
(責任編輯: 許 妍)
Combination Strategy of Guidance Methods for Wire-guided Torpedo
WEI Yu-hua, WANG Kai-shuai
(1. Military Representatives Office of Navy in Beijing Supplying Appendix for Weapon Equipment, Beijing 100082, China; 2. System Engineering Research Institute, Beijing 100094, China)
A wire-guided torpedo can not achieve its optimum operational efficiency in the case of single wire-guidance method. Considering the guidance purpose of every torpedo attacking phase, we propose a combination strategy of guidance methods for a wire-guided torpedo, and discuss the application occasion and condition of the combination strategy, as well as the requirements for target movement information and modeling. Simulation result validates the efficiency of the proposed combination strategy of torpedo wire-guidance methods. This study may provide a reference to the research on wire-guidance methods for attacking maneuvering target by a wire-guided torpedo.
wire-guided torpedo; guidance method; combination strategy
TJ631.4
A
1673-1948(2014)03-0210-04
2013-12-12;
2014-01-07.
魏玉華(1966-), 男, 高級工程師, 研究方向為魚雷武器作戰使用.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
