GNSS信號捕獲與跟蹤算法的改進與實現
2014-02-28 06:17:42辛富國李榮芳
電信科學 2014年3期
關鍵詞:信號
辛富國,李榮芳
(陜西郵電職業技術學院 咸陽712000)
1 捕獲與跟蹤技術的研究意義
軟件接收機的關鍵技術在于信號的捕獲和跟蹤。信號捕獲重在估計兩個重要參數[1,2]:一個是C/A碼周期的開始,另一個是輸入信號的載波頻率。只有完成信號捕獲過程,才進入鎖定跟蹤程序,而GNSS(全球衛星導航系統)接收機花在信號捕獲上的時間是所有TTFF(首次定位時間)最冗長的一部分,提高信號捕獲的速度對于縮短TTFF意義重大[3]。本文基于FFT循環相關捕獲法提出了改進算法,改進后的算法縮短了捕獲時間,并仿真驗證了該算法的可行性。
捕獲只是提供一個粗略的載波頻率和碼相位。在接收機工作過程中,要時刻對衛星信號保持跟蹤,估計精確的碼相位和多普勒頻移、載波相位并解調導航電文,并計算出衛星與接收機之間的偽距。衛星和接收機之間相互運動,使得接收到的信號有多普勒頻移,載波頻率和偽碼相位時刻在變化,如果沒有對載波NCO和偽碼NCO持續不斷地進行動態調整,捕獲的信號很快就會失鎖,因此信號跟蹤從其本質來說就是為了實現對信號的穩定跟蹤而采取的一種對環路參數動態調整的策略[4~6]。
2 基于FFT算法的信號捕獲
記sI(t)和sQ(t)分別為導航系統中中頻信號和本地載波發生器輸出的同相和正交信號相乘的結果,即:

將本地偽碼發生器輸出看作一個本地信號sL(t)=C(t),則I路和Q路積分器的輸出量分別為:

其中,τ對應某一個偽碼相位。此時,同相路和正交路的積分器輸出的相關結果分別為:

x(t)和y(t)的卷積表達式為:

通過式(5)和式(7)的相似性,可以將同樣的方法運用到GNSS信號捕獲中相關結果的計算上[7~10]。得到互相關的頻域表達式后,利用傅里葉逆變換得到其時域表達式,介紹如下。
對式(5)做傅立葉變換,得到:
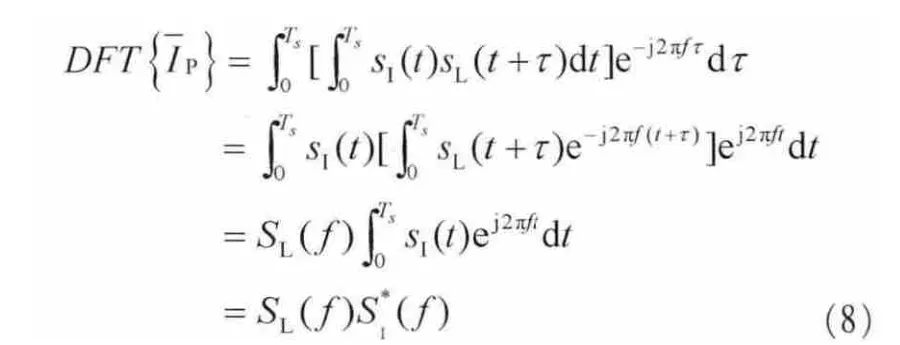
其中,SL(f)和SI(f)分別是SL(f)和SI(f)的傅立葉變換,SI*(f)是SI(f)的復共軛。從式(8)可以得出,基于FFT算法的信號捕獲原理如圖1所示。
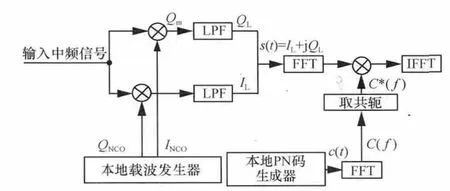
圖1 基于FFT算法的信號捕獲原理
實際的處理流程簡述如下。輸入信號與本地產生的載波信號相乘,如果載波頻率與輸入信號的載波頻率一致,則輸入信號的偽隨機碼信號得到恢復。將恢復后的偽隨機碼進行離散或快速傅里葉變換,得到其在頻域的表示。同時將本地產生的偽隨機碼進行傅里葉變換并取其共軛,與輸入信號的頻域結果相乘,再對相乘的結果取逆傅里葉變換,該結果的模即時域的相關結果。如果在結果中出現一個峰值,則這個峰值的索引值對應輸入信號的碼相位。
3 基于FFT算法的改進
在循環相關捕獲法中產生本地碼Lsi(n),由于Lsi(n)是復數,頻譜是不對稱的,如圖2(采樣頻率為16.367 6 MHz,采樣點為1.636 7×104)。從圖中可以明顯看出,信息包含在前一半的譜線中,另一半譜線中的信息很少,因此只采用一半數據進行FFT變換,通過循環相關方法實現捕獲的改進思路如圖3所示。

圖2 本地產生信號頻譜

圖3 基于FFT算法的改進思路
該方法只采用一半數據進行FFT變換,因此節省了捕獲時間。
4 仿真驗證改進后的算法
用1 ms采樣數據在MATLAB環境下仿真實現衛星信號的捕獲,仿真中的采樣頻率為16.367 6 MHz,中頻(IF)為4.130 4 MHz。圖4、圖5顯示的是改進后捕獲算法的輸出結果。圖4顯示,19號衛星可見,出現一個峰值,峰值位于碼相位3770和頻率4.136 94 MHz處;圖5顯示,17號衛星不可見,沒有峰值輸出,很難判斷碼相位和頻率。

圖4 19號衛星捕獲結果

圖5 17號衛星捕獲結果
5 跟蹤實現及仿真結果
載波跟蹤環中用來剝離PRN碼的本地碼來自碼跟蹤環。同樣,碼跟蹤環中用來剝離載波的兩路本地載波信號來自載波跟蹤環。相位鑒別器的I路和Q路輸入來自碼跟蹤環的IP和QP相關值,這樣可以減少計算工作量。組合的DLL和PLL跟蹤環如圖6所示。

圖6 組合的DLL和PLL跟蹤環
圖7 (a)中,跟蹤的兩路輸出分別為I_P和O_P兩支路信號,I_P支路輸出為導航數據,跟蹤到的數據為沒有考慮頻率牽引在穩定的跟蹤過程中的數據,跟蹤環進入穩定跟蹤階段后,I路輸出明顯的0和1 bit,而Q路輸出的是噪聲分量,進入穩定的跟蹤階段后,就可以讀取I路輸出以進行導航電文的解調。跟蹤時間為1 s,可以看出導航數據跳變基本出現在20 ms的整數倍,因為電文數據速率為50 bit。
圖7(b)是在穩定跟蹤階段輸入信號與本地中間碼、超前碼和滯后碼的相關積分結果。縱坐標為積分結果,橫坐標為時間,單位是s。可以很明顯地看出,中間碼的輸出結果最強,超前碼和滯后碼

圖7 19號衛星跟蹤結果
圖7(c)和圖7(d)是載波環鑒相器和碼環鑒相器輸出結果。可以看出,載波環的響應時間大概是0.02 s,而碼環的響應時間大概是0.15 s,說明跟蹤的速度比較快。
6 結束語
根據對導航信號的頻譜觀察,改進了基于FFT捕獲的算法,并對改進后的算法進行了仿真驗證,結果表明該算法具有可行性,可以縮短捕獲時間;設計了GNSS接收機完整跟蹤通道,并采用MATLAB實現了對跟蹤性能的仿真,結果表明所設計的跟蹤通道達到設計要求。
1 曹沖.衛星導航接收機技術的發展趨勢.數字通信世界,2005(5):55~56
2 Kaplan E D.GPS原理與應用.邱致和,王萬義譯.北京:電子工業出版社,2002
3 田薇,張超,姚長江.基于FFT算法的GPS信號快速捕獲方法研究.彈箭與制導學報,2008,28(3):240~242
4 Rinder P,Bertelsen N.Design of a single frequency GPS software receiver.Aalborg University,2004
5 Akopian D.Fast FFT based GPS satellite acquisition methods.IEEE Proceedings Radar,Sonar and Navigation,2005,152(4):277~286
6 張雷,王建宇,戴寧.GPS信號捕獲跟蹤的仿真分析與研究.現代防御技術,2008,36(2):107~128
7 Li J H,Ba X H,Sheraz A,et al.An adaptive algorithm for fast acquisition of GPS signals.Chinese Journals of Electron Devices,2007,30(3)
8 Olivier J.Design of galileo L1F receiver tracking loops.Alberta Canada:University of Calgary,2005
9 Wang W J.High dynamic signal tracking algorithm based on software GNSS receiver.Journal of Harbin Institute of Technology,2008,40(1):226~230
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
