國外地球靜止軌道在軌服務衛星系統技術發展概況
2014-03-06 12:08:34陳士明周志成曲廣吉王典軍袁俊剛中國空間技術研究院通信衛星事業部
國際太空 2014年4期
陳士明 周志成 曲廣吉 王典軍 袁俊剛(中國空間技術研究院通信衛星事業部)
地球靜止軌道(GEO)在軌服務技術在促進經濟、國防和空間技術發展方面有重要意義。本文概述了國外在軌服務衛星系統技術研究進展,包括美國、歐洲及其他國家的GEO在軌服務研究計劃和美國在軌服務關鍵技術的試驗情況,從目標監視和導航測量、捕獲連接、在軌服務機械臂和組合體動力學參數辨識及建模控制等方面介紹了在軌服務的關鍵技術進展情況。總結了在軌服務衛星系統技術的發展現狀,提出了未來GEO在軌服務衛星系統技術的發展展望。
1 引言
位于GEO的衛星覆蓋面積大,且相對于地面靜止,在通信、導航、預警、遙感等軍用和民用領域發揮著重要作用。在軌服務是指在空間通過人、機器人或兩者協同完成涉及延長各種衛星壽命、提升執行任務能力的一類空間操作。
GEO在軌服務的主要任務、功能和基本內涵包括5個方面:①在軌目標監測,指在目標衛星附近,采用可見光、紅外、微波等敏感器對目標衛星進行成像、位姿測量,并獲取目標衛星相關信息;②在軌輔助變軌,指服務衛星協助目標衛星進行軌道調整,包括輔助入軌和輔助離軌等;③在軌燃料補給,指通過補給燃料,為目標衛星提供完整的姿態和軌道控制功能,包括燃料加注和接管目標衛星的控制推進系統等;④在軌故障修復,指排除目標衛星的故障,恢復衛星的正常功能,包括更換故障部件和排除故障展開太陽電池翼或天線等;⑤在軌有限裝配,指通過更換或增加硬件的方式保持或增強目標衛星的能力,包括更換模塊、增加模塊和模塊的回收利用等。
GEO在軌服務的優勢主要是降低衛星任務失敗的風險,減少任務費用,增強任務系統功能及提高任務的靈活性等,在經濟、國防和促進空間技術發展方面有重要意義。
2 國外在軌服務技術進展情況
對于在軌服務技術特別是GEO在軌服務技術,世界上各個航天大國進行了大量的研究。隨著這些項目計劃的逐步提出和在軌試驗,美國和歐洲等將具有在GEO上對絕大多數合作/非合作目標進行交會、監測、捕獲、釋放、維修、變軌等操作的技術能力。
美國GEO在軌服務研究計劃
美國很早就開展了GEO在軌服務方面的研究,1996年就針對未能入軌的特高頻-1(UHF-1)衛星提出了在軌服務設想并申請了專利,隨后美國針對GEO衛星提出并開展了一系列在軌服務計劃。
(1)“近期能驗證的前端機器人”/“通用軌道維修航天器”計劃
2004年,美國國防高級研究計劃局(DARPA)資助了GEO“通用軌道維修航天器”(SUMO)的研究,其目標是為絕大多數非合作目標進行在軌服務,以演示驗證空間交會、自主抓捕等技術。2006年,SUMO更名為“近期能驗證的前端機器人”(FREND),旨在開展自主捕獲非合作目標的空間機械臂技術演示驗證研究。目前,FREND/SUMO計劃已經完成地面演示驗證,該項目原定于2011年開展低地球軌道(LEO)的飛行演示驗證,但至今未有公開報道。
(2)“微衛星技術試驗”計劃
“微衛星技術試驗”(M iTEx)計劃是由美國DARPA、空軍和海軍等共同推出的一項針對合作/非合作目標的在軌目標監視計劃。M iTEx系統包括火箭上面級和2顆小衛星。2006年,該計劃首次在GEO成功演示了在軌目標監視技術。在完成預定的在軌監視演示任務后,2顆M iTEx小衛星在2008年底至2009年初機動至失效的國防支援計劃-23(DSP-23)導彈預警衛星附近,成功對其進行了在軌監測。
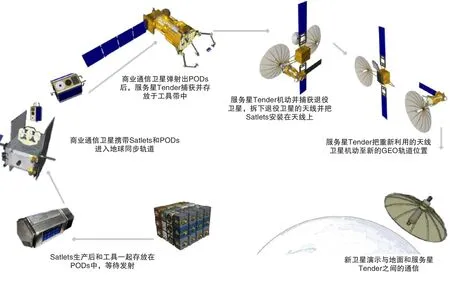
(3)“任務擴展衛星”計劃
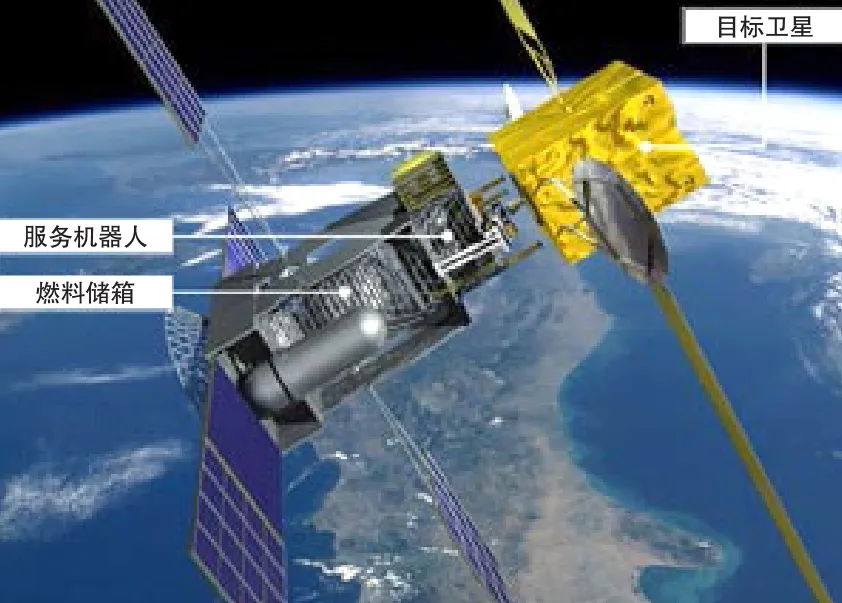
在維維衛星公司(V iviSat)的“任務擴展衛星”(MEV)設計方案中,M EV飛行器與GEO目標衛星交會對接形成剛性連接的組合體后執行在軌服務任務。不同于在軌燃料加注,與目標對接后,M EV為目標衛星提供推進系統的功能。另外,M EV還可以執行輔助離軌任務。
(4)“鳳凰”計劃
2011年12月,美國DARPA發布了新的GEO在軌服務計劃—“鳳凰”(Phoenix)計劃,該計劃旨在重新利用退役或無法正常工作的在軌衛星的大型天線等部件,降低新型衛星的開發成本。Phoenix計劃定于2015-2016年進行在軌演示驗證,其目標是實現至少1副天線部件的重復利用。
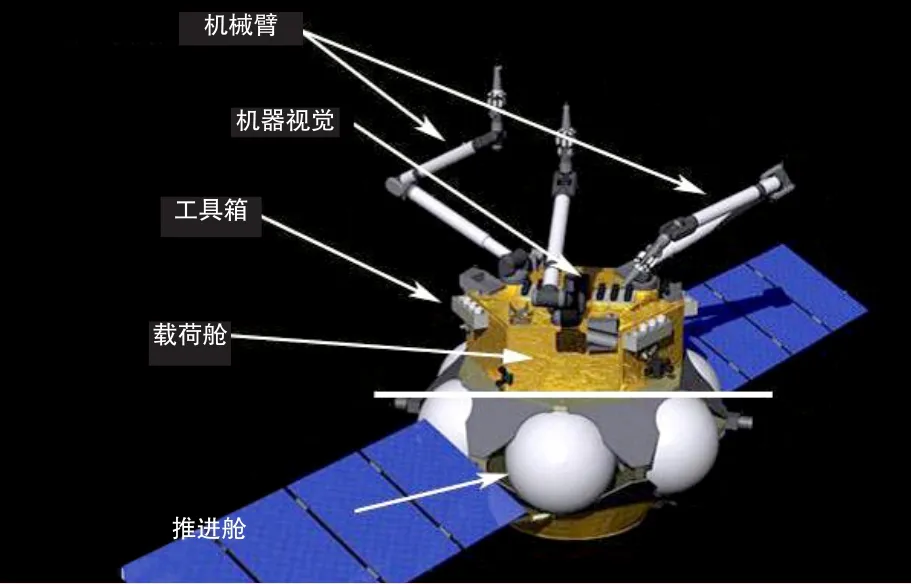
FREND/SUMO計劃中的服務衛星
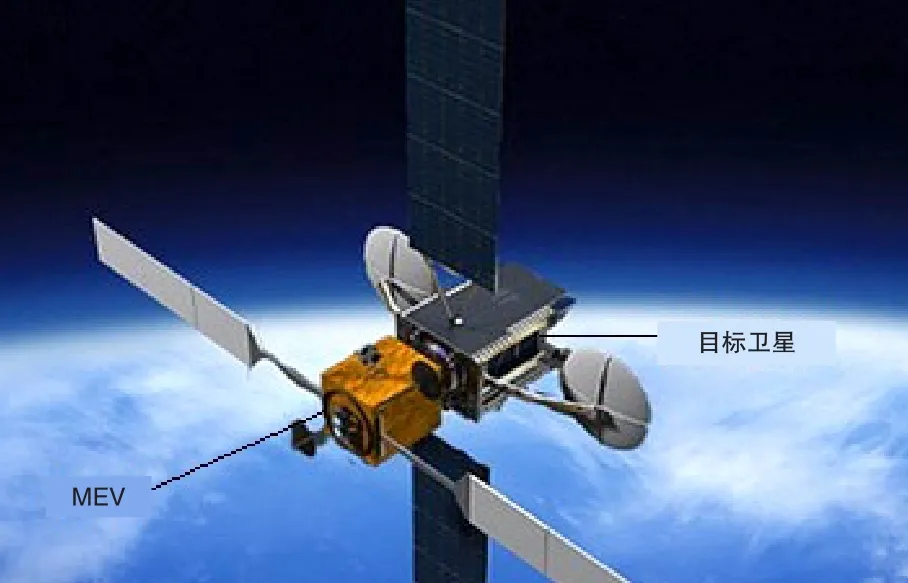
MEV在軌服務設想圖
歐洲GEO在軌服務研究計劃
(1)“地球靜止軌道服務飛行器”計劃
歐洲航天局(ESA)于1989年提出了“地球靜止軌道服務飛行器”(GSV)的概念,主要用于對GEO衛星進行目標監視、燃料加注、模塊更換和輔助離軌等功能。由于種種原因,GSV并沒有進入實際工程階段,而僅開展了概念設計。
(2)“試驗服務衛星”計劃
德國航空航天中心(DLR)于1994年提出了“試驗服務衛星”(ESS)計劃,以研究在GEO上對目標衛星進行交會、監視和維修等在軌服務技術。ESS上安裝有一個機械臂,用于試驗機械臂的遙操作控制技術,完成對故障衛星的捕獲、檢查和維修。該計劃也只進行到概念設計階段。
(3)“赫爾墨斯”計劃
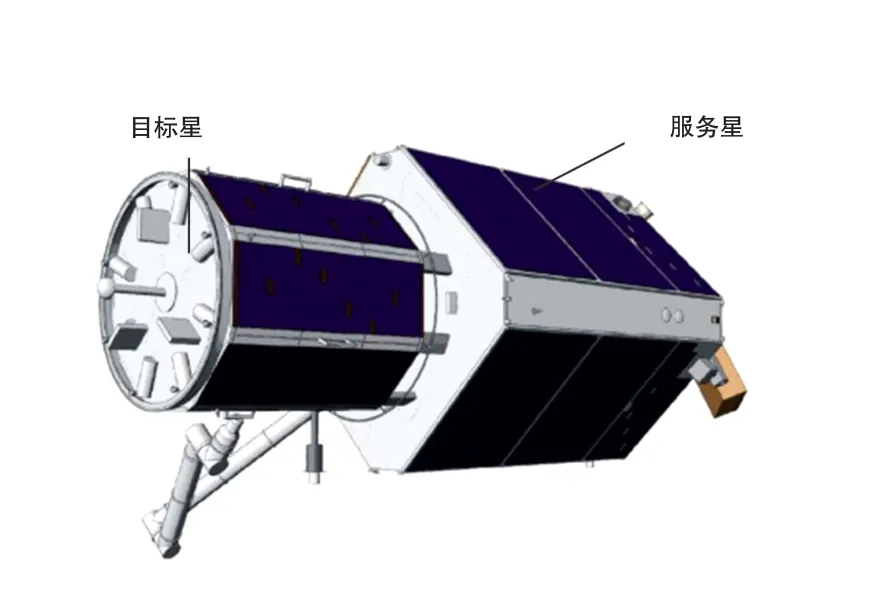
ESA、DLR以及宇宙(Kosm as)公司合作開展了“赫爾墨斯”(H erm es)計劃,探索研究在軌的燃料收集和加注技術。Herm es計劃收集已失效但仍有燃料的衛星、有多余燃料的正常衛星和火箭上面級中的燃料,然后給需要燃料的GEO通信衛星進行燃料加注。Herm es在軌服務系統包括服務衛星、燃料存儲衛星、監視小衛星、可更換推進模塊和軌道提升艙五部分,其中僅有服務衛星是必須的。Herm es計劃目前還處在概念論證階段。
GSV的方案設想
ESS計劃方案設想圖
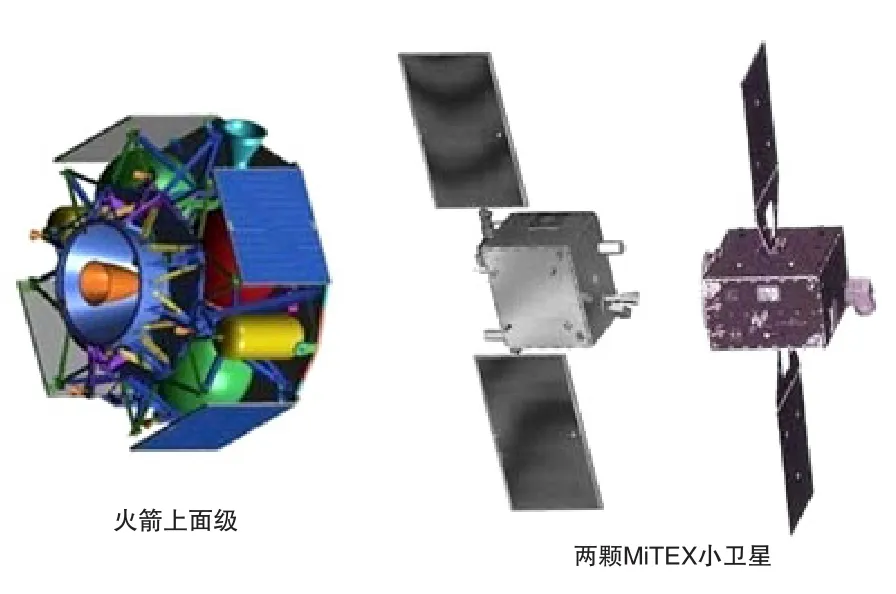
MiTEx計劃方案概念圖
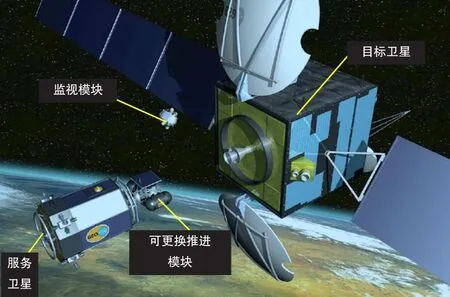
Herm es計劃的在軌加注想象圖
(4)“地球靜止軌道清理機器人”計劃
2002年開始的“地球靜止軌道清理機器人”(ROGER)計劃,旨在研究捕獲GEO非合作目標衛星并輔助其離軌等技術。服務衛星經地面引導和自主導航至距離目標15m處,然后服務衛星釋放網狀或繩系抓捕系統捕獲目標,隨后服務衛星將其拖入“墳墓”軌道,與目標分離后返回GEO等待下一次任務。其驗證的關鍵技術包括空間交會、目標測量、飛網/飛爪捕獲技術以及組合體控制技術。由于種種原因,該計劃的研究未能繼續開展下去,但其思想引起了國際航天界的廣泛關注。
(5)“空間系統演示驗證技術衛星”計劃
“空間系統演示驗證技術衛星”(TECSAS)計劃的目標是研制一個可接受在軌服務的目標衛星和服務衛星。該計劃于2006年終止后,DLR提出了后續研究項目為“德國在軌服務任務”(DEOS)項目。DEOS包括合作目標交會對接、慢旋非合作目標的捕獲、組合體軌道機動。盡管DEOS以GEO衛星為服務對象,但近期將先在LEO上開展演示,以驗證慢旋非合作目標的捕獲連接等關鍵技術。
DEOS計劃對接示意圖
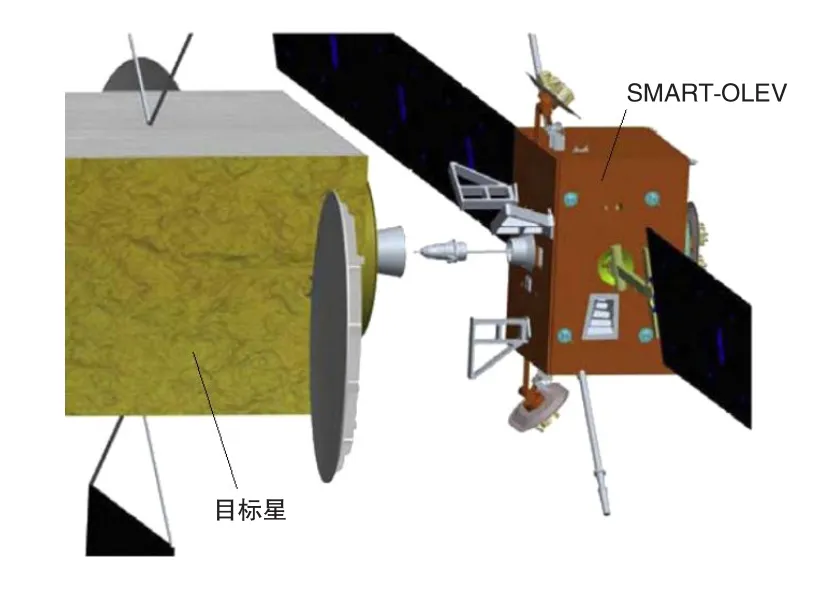
SMART-OLEV與目標衛星的對接示意圖
Phoenix計劃的在軌演示驗證設想
(6)“軌道延壽系統”計劃
DLR與軌道復活公司合作,開展了“軌道延壽系統”(CX-OLEV)航天器的研制。CX-OLEV航天器與目標衛星進行對接后,接管目標衛星的姿態和軌道控制功能,使其有效載荷繼續工作。由于CX-OLEV航天器是基于ConeXp ress平臺建造的,沒有經過飛行驗證,且僅適用于阿里安-5(A riane-5)運載火箭。因此在新一輪的方案中,采用了經過飛行驗證的“小型先進技術研究任務”(SMART)小衛星平臺,服務衛星進化成SMART-OLEV平臺。
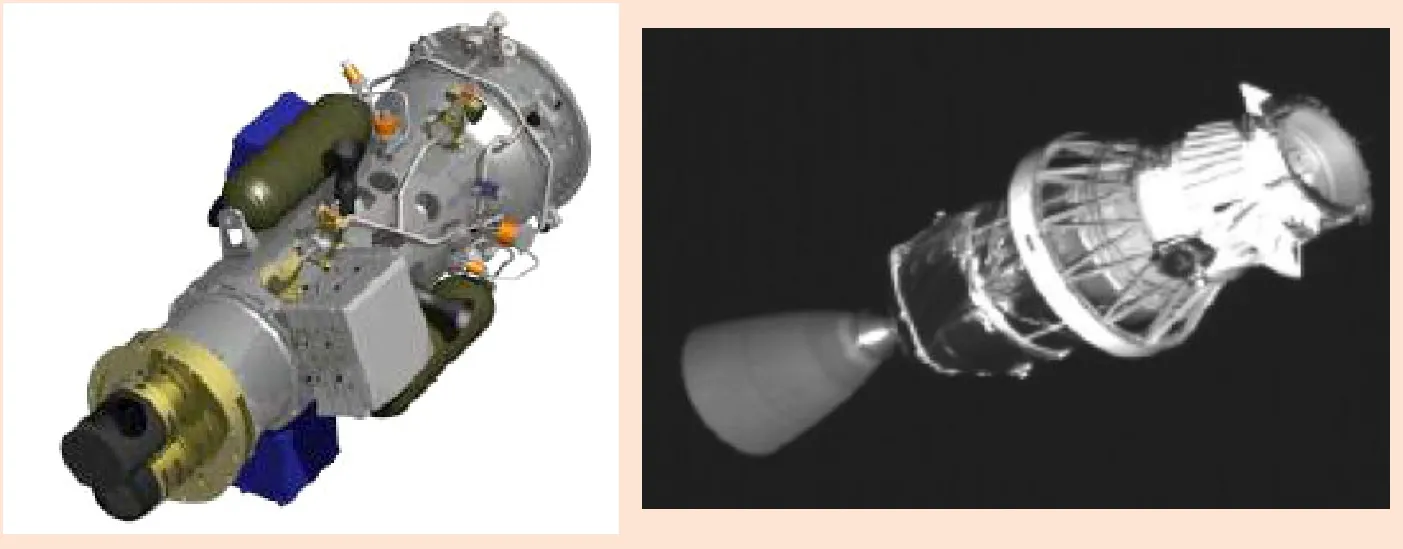
XSS-10小衛星及火箭上面級
其他國家的GEO在軌服務研究計劃
(1)“GEO延壽系統”
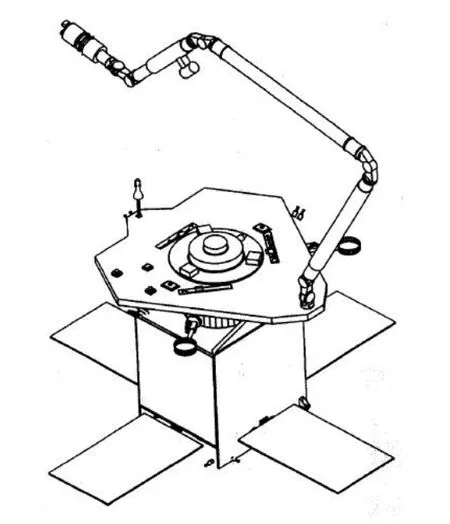
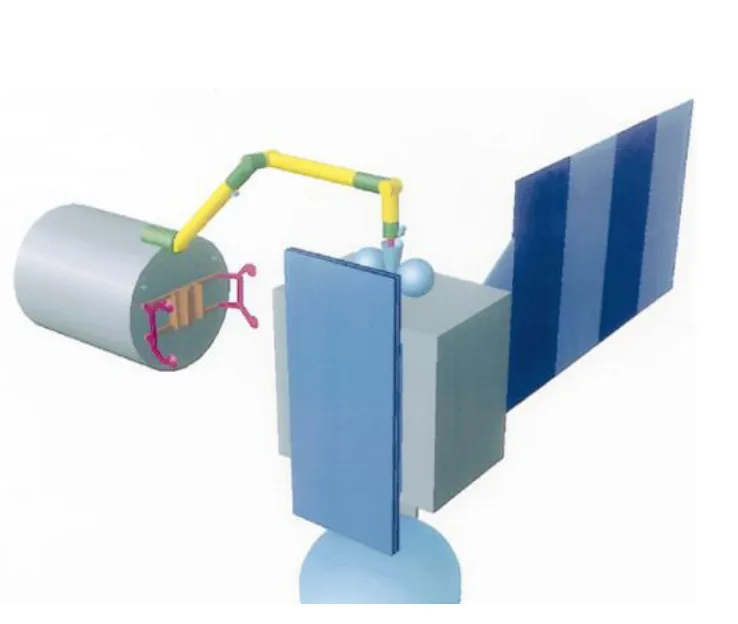
加拿大麥德(MDA)公司提出了利用機械臂對壽命末期GEO衛星進行燃料加注的“GEO延壽系統”方案設想。該系統利用機械臂捕獲目標的遠地點發動機噴管形成剛性組合體,然后再打開目標衛星的注排閥門,插入軟管泵入適量燃料。另外,該系統還具備簡單的維修功能,能夠排除太陽電池翼打開等故障。
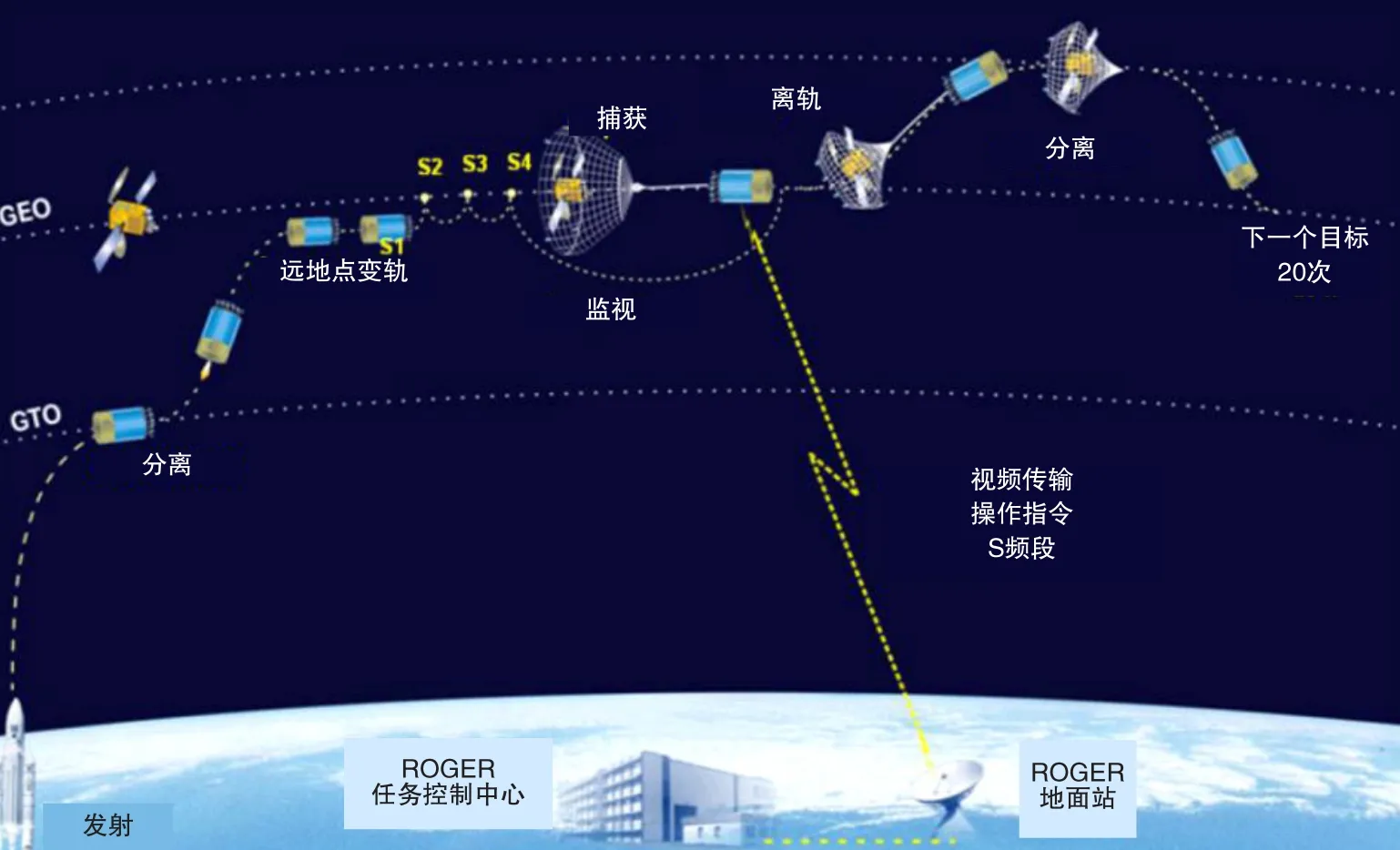
ROGER計劃的流程
(2)“在軌維修系統”計劃
日本的“在軌維修系統”(OM S)計劃的目標是實現對GEO衛星的在軌監測、維修、輔助入軌以及空間碎片處理等任務。日本國家信息通信技術研究所(N ICT)和三菱重工工業公司(M H I)已經計劃在地球同步轉移軌道(GTO)利用智慧衛星-1(Sm artSat-1)小衛星來演示驗證在軌服務的自主交會技術等關鍵技術。
XSS-11小衛星設計圖
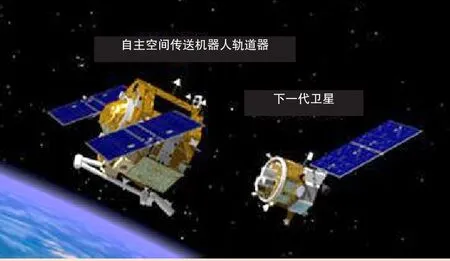
Orbita l Express計劃概念圖
美國低軌道在軌服務衛星試驗計劃
(1)“試驗衛星系統”計劃
“試驗衛星系統”(XSS)計劃是美國空軍提出的模塊在軌服務概念的研究計劃。目前,已經公布的XSS系列衛星有XSS-10和11。XSS-10的任務目標是演示驗證自主導航、近距離交會以及目標監視技術。該任務由微小衛星XSS-10和火箭上面級組成。2003年1月,XSS-10成功完成了在軌試驗,驗證了微小衛星自主交會、目標監視的軟硬件技術。XSS-11小衛星對圖像處理技術和自主交會技術進行了改進。XSS-11于2005年4月入軌后,與火箭上面級在0.5~1.5km的距離先后3次成功交會,驗證了非合作目標的自主交會技術。
(2)“自主交會技術驗證”計劃
“自主交會技術驗證”(DART)計劃是美國航空航天局(NASA)提出的旨在驗證自主空間交會技術。DART衛星的任務是在軌道上與目標衛星進行一系列自主交會、逼近和繞飛操作,驗證其敏感器、推進系統、控制器及軟件的性能。2005年4月,DART衛星發射升空,由于GPS接收機的軟件錯誤導致燃料提前耗完,原計劃的16~24h的任務僅進行了11h,最終與目標衛星相撞,任務失敗。
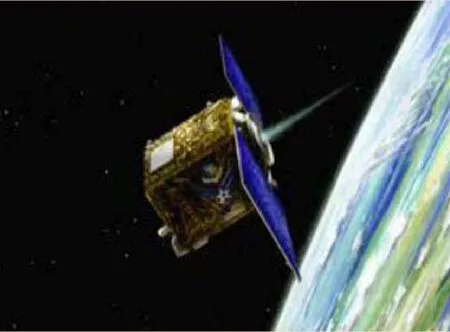
(3)“軌道快車”計劃
2007年完成的“軌道快車”(Orbital Exp ress)計劃,其驗證的關鍵技術包括自主交會與逼近、自主捕獲連接、燃料雙向傳輸、在軌電池和計算機模塊更換。Orbital Exp ress計劃由目標衛星“下一代衛星”(NEXTSat)和服務衛星“自主空間傳送機器人軌道器”(ASTRO)組成。該計劃成功完成了在軌飛行試驗,由于其具備在軌捕獲、模塊更換和在軌加注等多項功能,因而受到了高度關注,成為在軌服務技術發展史上的里程碑事件。
3 在軌服務衛星系統關鍵技術進展
目標監視和導航測量技術
(1)空間交會、繞飛和懸停技術
空間交會技術是實現在軌服務的基礎,交會過程中兩顆衛星之間的相對位置和姿態控制精度決定了后續捕獲連接操作能否順利進行。目前,針對合作目標的空間交會技術比較成熟,一般采用共橢圓軌道的交會逼近技術。但是對于在軌服務而言,交會過程中需要對目標進行交會、繞飛和懸停,以實現對目標衛星的監視測量,因此需要研究在軌服務的交會技術,包括軌道面內/外繞飛、任意位置懸停等技術。
(2)目標測量敏感器技術
空間目標監視測量是保障在軌服務順利進行的關鍵技術。目前能夠提供相對運動信息的敏感器包括微波雷達、激光雷達、星敏感器、紅外敏感器、可見光相機等。
微波雷達依靠目標表面的蒙皮反射或應答機工作,可用于合作/非合作目標的測量。微波雷達可測量出目標衛星的距離和方位,但在距離較近時距離測量不準。激光雷達通過測量激光在目標和測量設備之間往返時間計算出距離,主要包括激光測距雷達、激光測速雷達、激光跟蹤雷達和激光成像雷達。激光雷達可測量合作/非合作目標的距離、速度,甚至可以測量角度及相對姿態等。可見光相機采集目標的圖像,通過圖像處理技術可以提取目標的幾何構型信息。如果在目標上安裝有標志器時,可以在較近的距離測量給出目標的相對位置和姿態;如果采用立體視覺技術,在有先驗知識的前提下也可以應用于非合作目標的相對位置和姿態測量,但立體視覺技術目前還不成熟。
(3)相對導航濾波技術
在空間交會過程中,由于服務衛星和目標衛星之間距離較近,由地面定軌的絕對導航不再適用,因此需要進行相對導航。相對導航是指服務衛星基于自身攜帶相對導航設備的測量,在一定條件下實時估計其相對目標衛星的位置和速度的技術。敏感器測量到服務衛星與目標衛星之間的相對運動狀態后,需要對運動狀態進行濾波估計,使狀態估計值比觀測值更接近于真實值。
濾波分為線性和非線性兩大類,線性濾波的狀態方程和觀測方程均為線性,主要包括卡爾曼濾波、加權最小二乘濾波等;當狀態方程和觀測方程全部或部分呈現非線性時,則應采用非線性濾波估計,主要包括推廣卡爾曼濾波(EKF)、無跡卡爾曼濾波(UKF)、粒子濾波等。
MDA公司的GEO延壽系統想象圖
FREND抓捕目標星分離螺栓孔和對接環
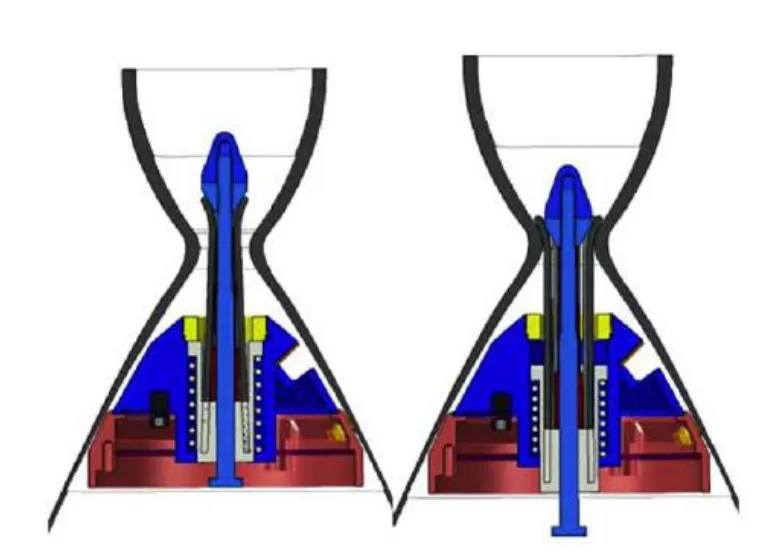
冠狀鎖緊式對接機構的對接過程
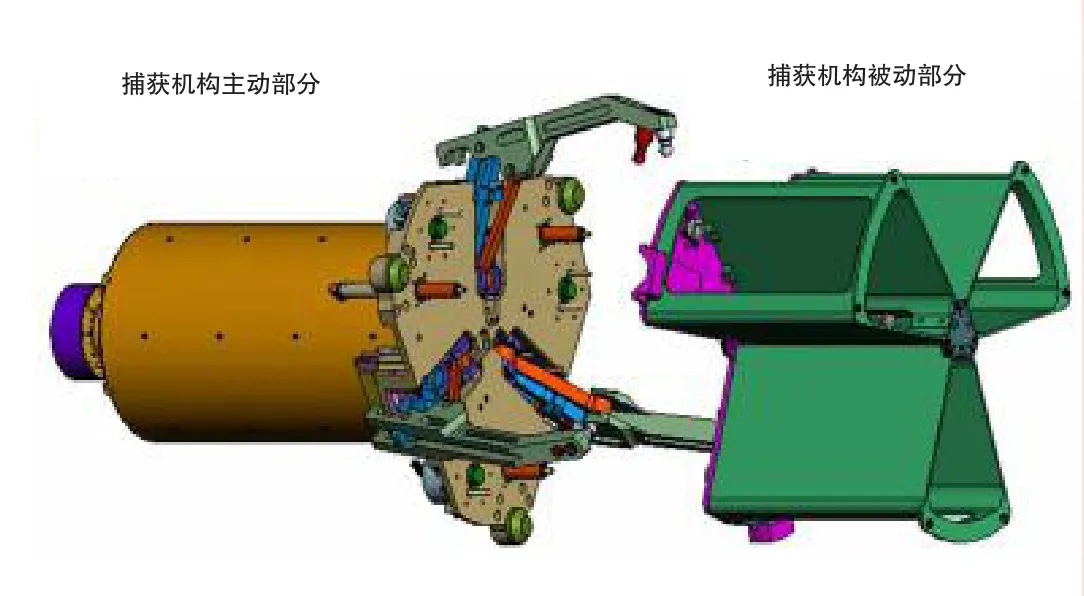
Orbital Express計劃中使用的三叉式對接機構
捕獲連接機構技術
捕獲連接是指服務衛星捕獲目標衛星并與其連接形成整體。根據最終連接形式,捕獲連接可分為剛性連接和柔性連接。
目前,載人飛船上的對接機構有桿錐式和異體同構周邊式,這些對接機構一般質量較大,適用于有人員或大量貨物運送需求的對接。而在軌服務特別是GEO在軌服務沒有大量貨物運送的需求,因此一般采用小型對接機構。根據國外目前已有的捕獲對接方案,綜合可以得出捕獲連接機構主要分為如下三類:
(1)類桿錐式捕獲對接機構
類桿錐式捕獲對接機構由可伸縮的桿和接納錐組成,桿伸入接納錐后,靠接納錐的導向作用進入錐孔后部并鎖緊。類桿錐式屬于剛性連接機構,可用于合作或非合作目標的捕獲對接。典型的類桿錐式對接機構包括軟軸式對接機構和冠狀鎖緊式對接機構。冠狀鎖緊式對接機構是與目標衛星遠地點發動機噴管對接,并形成剛性連接的機構。
(2)爪式捕獲對接機構
爪式捕獲對接機構是通過手爪捕獲并拉緊鎖定的對接機構,一般包括抓手和供抓捕的把手或機構組成。由于需要在目標衛星上安裝把手或供抓捕的機構,爪式捕獲對接機構一般用于合作目標的捕獲對接。典型的爪式捕獲對接機構包括Orbital Express計劃的對接機構和抓手碰鎖式對接機構。Orbital Express計劃中的對接機構是通過絲杠-抓鉤系統技術實現的。
(3)繩系捕獲機構
繩系捕獲機構包括飛網捕獲機構和飛爪捕獲機構,其中飛網/飛爪與服務衛星通過繩子連接,捕獲目標衛星后形成服務衛星和目標衛星的繩系衛星。繩系捕獲機構屬于柔性捕獲機構,一般適用于非合作目標的捕獲。典型的繩系捕獲機構是ROGER計劃中提出的。
在軌服務機械臂技術
在軌服務的機械臂操作任務包括部件拆卸與安裝、燃料接口對接等,這些復雜任務對機械臂的運動精度和反饋控制形式等提出了很高的要求。
美國NASA聯合加拿大航天局(CSA)在“國際空間站”(ISS)上成功利用機械臂進行了燃料加注試驗,試驗使用了專門設計的末端工具為那些設計時未考慮在軌加注和維修的航天器提供在軌服務,開展了多項在軌加注操作,包括剪斷系繩、劃開隔熱多層、移除加排閥安全帽、模擬燃料傳輸等。
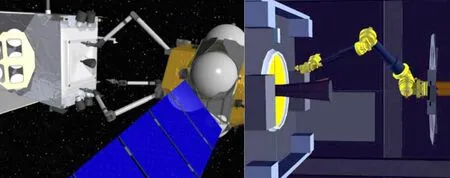
在軌服務機械臂還可以完成輔助捕獲對接操作,比如FREND計劃中利用機械臂抓捕目標衛星的分離螺栓和對接環。

Orbital Express計劃的機械臂抓捕
組合體動力學參數辨識技術
服務衛星與目標衛星連接后形成組合體,其動力學參數相比于服務衛星有較大變化,因此需要研究組合體的動力學參數辨識技術。目前衛星的動力學參數辨識方法包括濾波方法和最小二乘法。
(1)濾波方法
濾波方法的原理是把動力學參數增廣到系統狀態方程中,結合高精度的敏感器測量信息進行濾波估計。動力學參數辨識采用的濾波算法包括高斯二階濾波、卡爾曼濾波和非線性濾波。
(2)最小二乘法
最小二乘法的基本思想是根據動量定理和角動量定理構造星體動力學參數的最小二乘估計模型,并結合一定時間內的加速度、角速度、角動量、姿態等測量信息序列進行參數最優估計。最小二乘法可以得出質量和慣量等參數,使用的方法包括分布式遞推最小二乘辨識法和改進的最小二乘估計法等。
組合體動力學建模與控制技術
衛星的動力學建模技術已經日漸成熟,衛星的軌道和姿態控制方面也形成了較成熟的設計方法。但對于組合體而言,當目標是合作目標且控制系統正常工作時,需要考慮聯合采用目標衛星和服務衛星的執行機構進行協同控制;當目標是非合作時,需要論證組合體控制系統的穩定性。另外,對于采用繩系捕獲機構捕獲形成的繩系衛星,需要研究其軌道機動控制技術。
4 結論
GEO衛星是未來在軌服務的主要對象,針對GEO衛星進行在軌服務操作,不僅可以獲得顯著的經濟效益,而且在促進國防建設、空間技術的發展上具有重要意義。近年來,歐美等航天大國在GEO在軌服務方面開展了大量相關研究和關鍵技術研究試驗,但總體而言GEO衛星在軌服務系統技術還處于初期發展階段,與其相關的空間交會、目標監視測量、捕獲連接、在軌服務機械臂和組合體動力學參數辨識及建模控制等關鍵技術還需深入研究和充分驗證。隨著這些技術的逐漸突破和成熟,在軌服務技術必將對未來GEO衛星設計理念及運營模式產生重大影響。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
今日農業(2019年14期)2019-09-18 01:21:54
今日農業(2019年12期)2019-08-15 00:56:32
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
今日農業(2019年10期)2019-01-04 04:28:15
今日農業(2019年15期)2019-01-03 12:11:33
今日農業(2019年16期)2019-01-03 11:39:20
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
商周刊(2017年9期)2017-08-22 02:57:56