Modbus通訊協議在DCS與PLC通訊中的應用
2014-03-06 07:11:26康曉偉
機電信息 2014年6期
康曉偉
(杭州立佳環境服務有限公司,浙江 杭州311199)
0 引言
在當前技術條件支持下,Modbus通訊協議以RS232/RS485作為標準運行。在以該通訊協議為載體的接口系統中,可根據實際應用需求選擇科學的運行標準。其中,基于RS232通訊協議的接口系統僅能實現“一對一”的連接關系,理想狀態下傳輸速率在20.0kB/s范圍之內,同步運行狀態下可支持設備為8臺,傳輸距離僅為15.0m;而對于基于RS485通訊協議的接口系統而言,所對應的連接關系為“一對多”,理想狀態下傳輸速率在100.0kB/s以上,同步運行狀態下可支持設備為32臺,傳輸距離達到1200.0m。
1 通信系統硬件組織及連接
在通訊協議的支持下,每個XP244控制卡接口可支持4個設備的互聯,連接方法以參考手冊為準。同時,為保障其質量安全、可靠,要求該終端配備120.0Ω的終端電阻裝置。整個DCS系統與串行設備的連接示意圖如圖1所示。
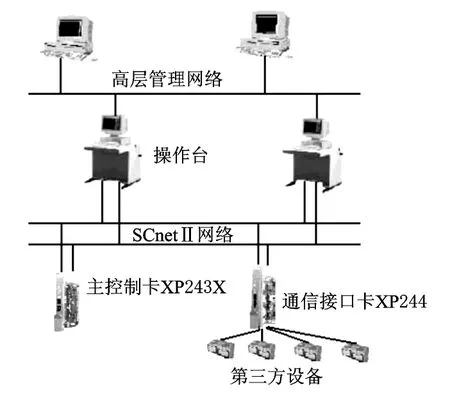
圖1 DCS系統與串行設備連接示意圖
2 DCS系統組態
為滿足DCS組態要求,具體實施方法為:在工程師站電腦上通過相應權限進入系統組態進行組態修改,首先在控制站進行所選卡件的組態,設置相應卡件名稱、地址、掃描周期、卡件類型、型號等,其中需要注意的是組態中卡件地址必須與撥碼開關一致,掃描周期不宜過短,以免影響總線系統運行。在進行Modbus通訊組態中,主要使用SCX語言編程和圖形編輯2種。在組態中,主要進行以下操作:(1)串行通訊設置:主要是對應串行設備的波特率和通訊方式選擇,需要和串行設備保持一致,從站地址不能沖突,地址范圍在0~255;(2)自定義變量設置:設置控制卡內部使用變量,主要根據通訊和系統要求設置內部變量字節和數量,其設置變量名不能和DCS其他控制站的變量名沖突;(3)圖形編輯使用:通過圖形編輯的各種指令來對通訊數據進行轉換和運算,如果通訊需要使用其他控制站數據,需要使用站間通訊方式來調用變量,并可以使通訊數據在各控制站內靈活調用;(4)SCX語言調用:控制卡通信驅動程序可以通過SCX語音編寫來實現,直接對控制站和串行設備進行數據交換,主要是對保持寄存器進行讀寫操作,需要注意的是控制卡內部通訊數據組要和從站設備的保持寄存器起始地址和變量數量保持一致。
通過以上的編程組態,在 Modbus通訊協議基礎上,DCS通過XP244控制卡件與外部串口設備連接,其中控制卡支持連接4臺從站設備,從站設備需使用Modbus Slave協議,DCS和每個串行設備能夠傳輸64個字節變量,即512個Bool量或32個Int量。
編程中需要注意的問題如下:(1)串行設備地址:每個控制卡最多帶4臺串行設備,而且串行設備之間地址不能沖突,每臺串行設備協議能夠進行地址識別;(2)串行設備接口:控制卡帶多臺串行設備時,如果其中某臺串行設備使用RS232接口,需要對其安裝RS232/RS485轉換模塊,以實現和其他串行設備的連接;(3)主從站關系:Modbus協議中,控制卡只能做主站,各串行設備只能做從站,主站主動發送指令,各串行設備進行響應;(4)通訊協議:串行設備只能使用Modbus Slave協議,而不是Modbus Plus協議;(5)數據格式:控制卡和串行設備進行數據通訊時,進行SCX語言編程,指令變量為Bool或者Int,控制卡讀寫串行設備都需要符合數據格式,如果控制卡調用其他控制站變量不符合數據格式,需要對其進行轉換;(6)時間函數設置:在SCX語言中,系統延遲等待時間和通訊指令等待時間要設置恰當,系統延遲時間如果太短則造成系統無法接收返回數據,而通訊指令等待時間太短則系統無法執行下一條指令,會造成通訊中斷。
3 PLC下組態及編程方法
在支持Modbus通訊協議的基礎條件下,首先需選擇能夠支持該協議的操作模塊。當前多推薦選擇CP341/CP441-2模塊。CP341/CP441-2模塊常態下對應有1/2個串行通訊接口,可支持Modbus通訊協議下的串行通訊需求。通過對該操作模塊的應用,可以Modbus為載體,滿足主從站通訊需求。具體的實現思路為:在實現 Modbus的過程中,基于CP341/CP441-2模塊,插入與該通訊協議相對應的硬件狗,以確保Modbus通訊協議下所對應的*.rtu格式數據信息能夠為CP模塊所支持與讀取。
在基于Modbus通訊協議實現PLC模塊組態與編程的過程中,由于所選擇的操作模塊為CP341/CP441-2模塊,因此需要選擇安裝上述模塊所對應的STEP75.x以及CP34.x軟件驅動程序。所安裝驅動程序覆蓋運行內容包括:對CP341/CP441-2模塊參數化處理窗口;基于滿足串行通訊需求的FB程序模塊;不同模板應用方式下對應例子程序模塊;CP模塊通訊口針腳定義標準。在通電條件下,完成CP341/CP441-2模塊的初始化工作,初始化后SF燈處于“ON”狀態。斷電操作后,插入基于Modbus通訊協議的從站硬件狗,進而安裝附屬從站軟件包。啟動程序后,可對CP341/CP441-2模塊進行雙擊啟動操作,記錄后期標稱所需的模板硬件地址參數。進而,選擇“Parameter”按鈕,實現Modbus通訊協議下PC單機與PLC的可靠連接。需要特別注意以下幾個問題:(1)在安裝基于Modbus驅動程序的過程中,需要確保PLC處于“STOP”狀態;(2)參數設置期間,Modbus通訊協議所對應的設置參數構成內容包括數據位指標、波特率指標、停止位指標、從站地址指標、奇偶校驗位指標幾方面。
在PLC編程操作期間,每針對PLC模塊進行一次冷啟動,就需對該Modbus功能模塊進行一次初始化設置工作。該操作下的具體表現形式為:系統給CP-START1個上升沿觸發信號,而在PLC模塊冷啟動的狀態下,OB100即所執行的第1個功能模塊,其主要功能在于面向基于Modbus的通訊協議實現相關參數的初始化設置工作。通訊功能塊可通過對“FB8PSND-RK”進行調用,支持功能塊與CP在通信上關系的構建,與之相對應的功能塊也應組在工程中并下裝到CPU中。
4 結語
本文圍繞Modbus通訊協議在DCS以及PLC通訊領域中的應用要點展開了詳細分析與探討,其研究價值表現在:通過DCS中的Modbus通訊模塊連接現場支持Modbus工況的設備或PLC的Modbus模塊,能夠實現現場分散設備或異構設備之間的集中統一控制,提高控制效率,降低控制費用,并可作為進一步研究應用PLC與DCS相結合的自動控制方案的基礎。
[1]涂雷,周秀紅.S7-200PLC與ACS550變頻器的 Modbus通訊[J].長江大學學報:自然科學版,2011(4)
[2]崔勇剛.Modbus通訊技術在連續重整裝置的應用[A].第五屆全國石油和化學工業儀表及自動化技術交流研討會論文集[C],2006
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
少先隊活動(2021年4期)2021-07-23 01:46:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16