大容量異步電動(dòng)機(jī)啟動(dòng)特性仿真分析研究
2014-03-07 02:24:20萬(wàn)玉晶邱立偉陳景榮王利來(lái)
中國(guó)測(cè)試 2014年6期
萬(wàn)玉晶,邱立偉,陳景榮,王利來(lái),李 順,劉 念
(1.中核核電運(yùn)行管理有限公司,浙江 海鹽 314300;2.四川大學(xué)電氣信息學(xué)院,四川 成都 610065)
大容量異步電動(dòng)機(jī)啟動(dòng)特性仿真分析研究
萬(wàn)玉晶1,邱立偉1,陳景榮1,王利來(lái)2,李 順2,劉 念2
(1.中核核電運(yùn)行管理有限公司,浙江 海鹽 314300;2.四川大學(xué)電氣信息學(xué)院,四川 成都 610065)
針對(duì)大容量異步電動(dòng)機(jī)啟動(dòng)頻繁的問(wèn)題,建立大容量異步電動(dòng)機(jī)在直接啟動(dòng)、轉(zhuǎn)子串電阻啟動(dòng)以及軟啟動(dòng)3種模式下的控制數(shù)學(xué)模型。利用Matlab/Simulink仿真異步電動(dòng)機(jī)啟動(dòng)特性,對(duì)大容量異步電動(dòng)機(jī)啟動(dòng)控制進(jìn)行仿真分析,為電力系統(tǒng)的電機(jī)節(jié)能控制以及大容量異步電動(dòng)機(jī)啟動(dòng)方式的選擇提供理論依據(jù)。
大容量異步電動(dòng)機(jī);數(shù)學(xué)模型;啟動(dòng)特性;仿真分析
0 引 言
近年來(lái)大型廠用電動(dòng)機(jī)起停頻繁,其啟動(dòng)過(guò)程對(duì)一些電氣設(shè)備的安全運(yùn)行造成很大隱患。由于異步電動(dòng)機(jī)啟動(dòng)時(shí),啟動(dòng)電流能達(dá)到額定電流的4~7倍,定子繞組端部結(jié)構(gòu)將承受很大的沖擊力,如果引線(小跳線)的機(jī)械強(qiáng)度不夠,可能造成扭彎曲或機(jī)械拉傷。同時(shí),轉(zhuǎn)子籠條承受著電磁力、離心力和熱應(yīng)力,端部籠條出鐵心到短路環(huán)范圍內(nèi),特別是籠條與短路環(huán)接觸的根部承受著很高的應(yīng)力,容易發(fā)生脫焊或斷裂事故[1]。
隨著電力工業(yè)的不斷發(fā)展,異步電動(dòng)機(jī)的容量越來(lái)越大,大容量以及特大容量電動(dòng)機(jī)陸續(xù)投入使用。電動(dòng)機(jī)的容量越大,啟動(dòng)所帶來(lái)的沖擊也越大,安全引患將會(huì)愈發(fā)突出[2-3]。大容量異步電動(dòng)機(jī)的啟動(dòng)特性關(guān)系到整個(gè)電力系統(tǒng)的穩(wěn)定,因此,研究其啟動(dòng)特性對(duì)保證電網(wǎng)的穩(wěn)定以及大容量電動(dòng)機(jī)的安全運(yùn)行十分必要[4]。
國(guó)內(nèi)外對(duì)異步電動(dòng)機(jī)的啟動(dòng)特性也有很多研究。文獻(xiàn)[2]分析了小容量三相異步電動(dòng)機(jī)的直接啟動(dòng)特性;文獻(xiàn)[3]分析了小容量三相異步電動(dòng)機(jī)的軟啟動(dòng)特性;文獻(xiàn)[4]對(duì)啟動(dòng)特性仿真模型建立進(jìn)行了分析。但是對(duì)大容量異步電動(dòng)機(jī)的啟動(dòng)特性分析較少,本文針對(duì)大容量異步電機(jī)的啟動(dòng)特性進(jìn)行仿真分析,并對(duì)幾種啟動(dòng)方式進(jìn)行對(duì)比,為電力系統(tǒng)的電機(jī)節(jié)能控制以及大容量異步電動(dòng)機(jī)啟動(dòng)方式的選擇提供合理的科學(xué)依據(jù)。
1 三相異步電動(dòng)機(jī)數(shù)學(xué)模型
異步電機(jī)的數(shù)學(xué)模型是一個(gè)高階、非線性和強(qiáng)耦合的多變量系統(tǒng)[5]。在研究異步電機(jī)的多變量數(shù)學(xué)模型時(shí),常作如下假設(shè):
1)三相繞組在空間對(duì)稱互差120°,磁勢(shì)在空間按正弦分布。
2)忽略鐵芯損耗。
3)不考慮磁路飽和,即認(rèn)為各繞組間互感和自感都是線性的。
4)不考慮溫度和頻率變化對(duì)電機(jī)參數(shù)的影響。
異步電動(dòng)機(jī)的數(shù)學(xué)模型主要由電壓方程、磁鏈方程和轉(zhuǎn)矩方程組成,通過(guò)坐標(biāo)變換和旋轉(zhuǎn)變換將異步電動(dòng)機(jī)三相靜止坐標(biāo)系下的數(shù)學(xué)模型轉(zhuǎn)換為d、q旋轉(zhuǎn)坐標(biāo)系的簡(jiǎn)單模型,只要在這兩個(gè)坐標(biāo)系下的合成磁勢(shì)相等,坐標(biāo)變換就是有效的。經(jīng)過(guò)變換后的數(shù)學(xué)模型為
電壓方程
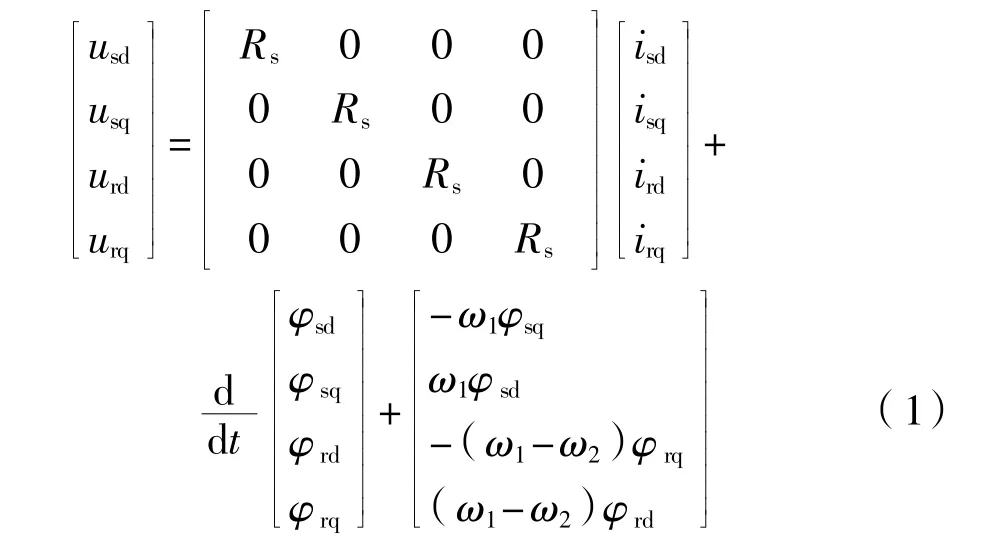
式中:usd、usq——d軸和q軸電壓;
Rs——電機(jī)定子電阻;
isd、isq——d軸和q軸定子電流;
φsd——磁通。
磁鏈方程
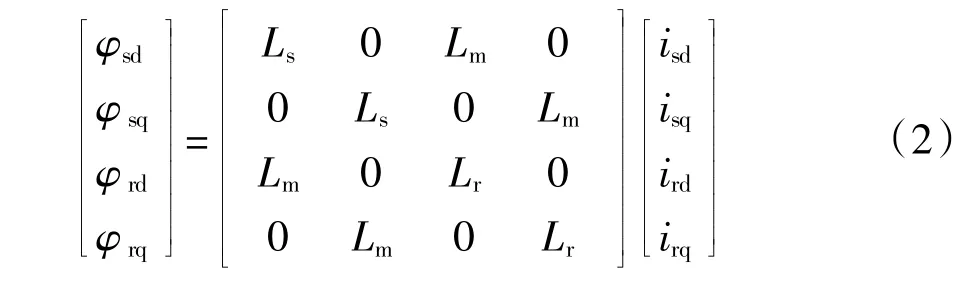
式中:Ls——自感抗;
Lm——互感抗。
轉(zhuǎn)矩方程

式中:Te——電磁轉(zhuǎn)矩;
np——轉(zhuǎn)速。
旋轉(zhuǎn)變換是用旋轉(zhuǎn)的繞組代替原來(lái)靜止的定子繞組,并使等效的轉(zhuǎn)子繞組與等效的定子繞組重合,且保持嚴(yán)格同步,等效后定、轉(zhuǎn)子繞組間不存在相對(duì)運(yùn)動(dòng)。
通過(guò)對(duì)三相異步電機(jī)進(jìn)行頻率折算,可以得到轉(zhuǎn)子旋轉(zhuǎn)時(shí)異步電機(jī)的平衡方程式組。
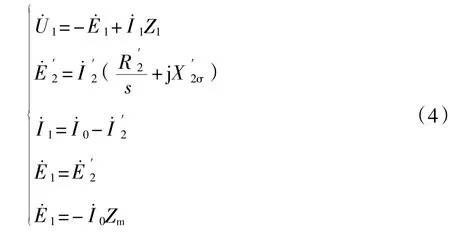
式中:U1——定子繞組相電壓;
E1——定子繞組側(cè)相電動(dòng)勢(shì);
I1——定子繞組相電流;
Z1——定子一相繞組的漏阻抗;
s——轉(zhuǎn)差率;
I0——控制勵(lì)磁電流。
對(duì)于容量>100 kW的異步電機(jī),可以得到異步電機(jī)簡(jiǎn)化等效電路模型,如圖1所示。
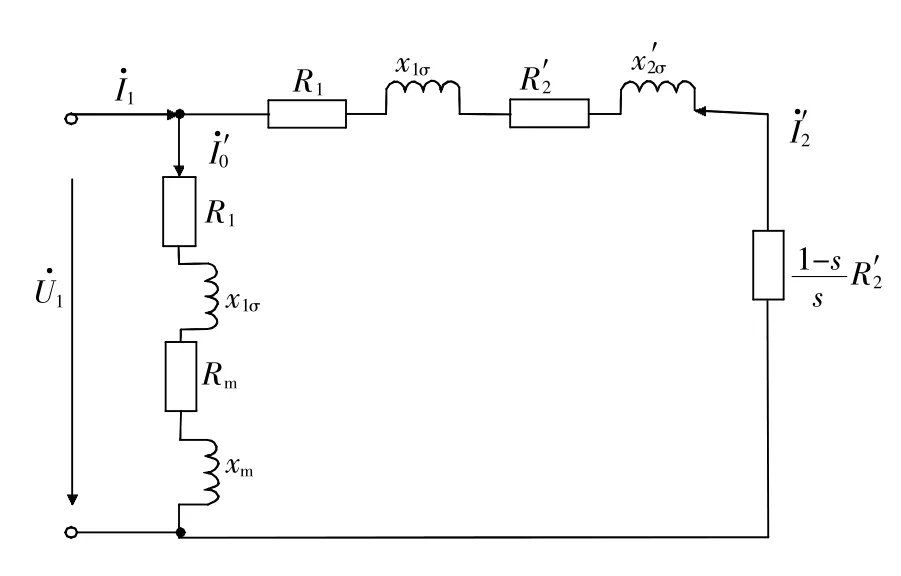
圖1 大容量異步電動(dòng)機(jī)簡(jiǎn)化模型
由于異步電動(dòng)機(jī)的轉(zhuǎn)子、定子漏阻抗比較小,啟動(dòng)瞬間的啟動(dòng)電流很大。由簡(jiǎn)化電路圖可知,通過(guò)控制電壓U1可以有效控制啟動(dòng)電流,這就是直接啟動(dòng)和軟啟動(dòng)的區(qū)別。
2 異步電動(dòng)機(jī)的啟動(dòng)方式
根據(jù)不同工況,異步電動(dòng)可有多種啟動(dòng)方法,比較常見(jiàn)的有直接啟動(dòng)和降壓?jiǎn)?dòng)[6]。隨著我國(guó)電子技術(shù)的不斷發(fā)展,軟啟動(dòng)被廣泛應(yīng)用,特別是針對(duì)大容量異步電動(dòng)機(jī),降壓?jiǎn)?dòng)法逐漸被軟啟動(dòng)所取代。常見(jiàn)的軟啟動(dòng)方式有晶閘管軟啟動(dòng)、磁飽和軟啟動(dòng)和磁控軟啟動(dòng)等[7]。本文基于大容量異步電動(dòng)機(jī)啟動(dòng)的特性對(duì)比,主要針對(duì)直接啟動(dòng)、壓降啟動(dòng)和晶閘管軟啟動(dòng)3種方式進(jìn)行了分析。
2.1 直接啟動(dòng)
直接啟動(dòng)是最簡(jiǎn)單直接的啟動(dòng)方式,啟動(dòng)時(shí)通過(guò)開關(guān)或接觸器將電機(jī)直接接到電網(wǎng)上。此方法在小型電動(dòng)機(jī)上應(yīng)用最為廣泛;具有起動(dòng)設(shè)備簡(jiǎn)單,起動(dòng)速度上升快,起動(dòng)轉(zhuǎn)矩比采用降壓起動(dòng)時(shí)大等優(yōu)點(diǎn)。在負(fù)載和電網(wǎng)兩方面都允許直接起動(dòng)的情況下,鼠籠式異步電動(dòng)機(jī)以直接起動(dòng)為宜。但是,針對(duì)本文所提的大容量異步電動(dòng)機(jī),直接啟動(dòng)的缺點(diǎn)更為突出。直接啟動(dòng)時(shí)產(chǎn)生的過(guò)大啟動(dòng)電流,不僅對(duì)外側(cè)電網(wǎng)中的其他用電設(shè)備造成影響,而且會(huì)使電機(jī)繞組過(guò)熱,加速電機(jī)絕緣老化,同時(shí)產(chǎn)生的巨大電磁力對(duì)電機(jī)機(jī)身也會(huì)造成破壞性影響。
2.2 轉(zhuǎn)子串聯(lián)電阻啟動(dòng)
繞線式異步電動(dòng)機(jī)的轉(zhuǎn)子串聯(lián)合適的電阻不但可以減小啟動(dòng)電流,還可以增大啟動(dòng)轉(zhuǎn)矩,也是比較適合大容量異步電機(jī)的啟動(dòng)方式。容量較大的一般采用分級(jí)啟動(dòng)的方法以保證啟動(dòng)過(guò)程中都有較大的啟動(dòng)轉(zhuǎn)矩和較小的啟動(dòng)電流。
2.3 晶閘管軟啟動(dòng)
晶閘管軟啟動(dòng)在電路上與直接啟動(dòng)有明顯不同,它在電源與被控電機(jī)之間串接一個(gè)由晶閘管組成的軟啟動(dòng)器。啟動(dòng)過(guò)程中通過(guò)控制晶閘管的導(dǎo)通角來(lái)控制輸入電機(jī)的電壓變化,直到啟動(dòng)結(jié)束。
晶閘管軟啟動(dòng)可以有效限制啟動(dòng)沖擊電流,大大減小啟動(dòng)過(guò)程對(duì)電網(wǎng)造成的壓降,從而減小了沖擊電流對(duì)電機(jī)自身的影響,延長(zhǎng)電機(jī)使用壽命[8]。
針對(duì)大容量異步電動(dòng)機(jī),軟啟動(dòng)有著明顯的優(yōu)勢(shì),將大大減小啟動(dòng)沖擊電流。當(dāng)大容量電動(dòng)機(jī)重載啟動(dòng)時(shí),軟啟動(dòng)是非常不錯(cuò)的選擇[9-10]。下面將通過(guò)仿真對(duì)比分析,給出大容量異步電動(dòng)機(jī)直接啟動(dòng)和軟啟動(dòng)的啟動(dòng)特性曲線。
3 大容量三相異步電動(dòng)機(jī)啟動(dòng)特性仿真分析
針對(duì)大容量異步電動(dòng)機(jī),對(duì)它在不同啟動(dòng)方法下的啟動(dòng)特性進(jìn)行仿真研究。利用Simulink自帶的異步電動(dòng)機(jī)模型,搭建直接啟動(dòng)、轉(zhuǎn)子串聯(lián)電阻啟動(dòng)和軟啟動(dòng)的3種仿真模型[11-12],并進(jìn)行仿真分析。
3.1 大容量三相異步電機(jī)直接啟動(dòng)特性仿真
直接啟動(dòng)電路非常簡(jiǎn)單,沒(méi)有任何調(diào)節(jié)措施。在仿真時(shí),將仿真時(shí)間設(shè)置為10s,并測(cè)量異步發(fā)電機(jī)的定子和轉(zhuǎn)子電流以及轉(zhuǎn)速和電磁轉(zhuǎn)矩的相關(guān)參數(shù)。
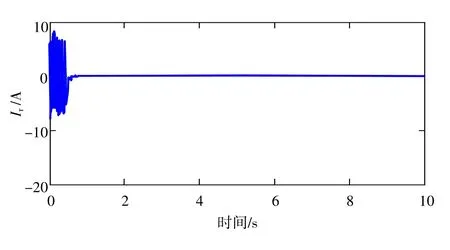
圖2 直接啟動(dòng)轉(zhuǎn)子電流特性
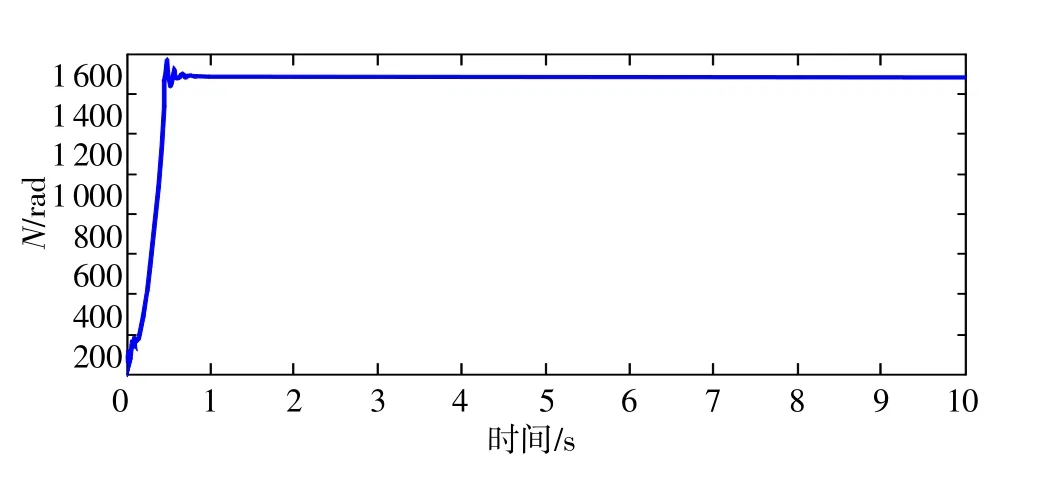
圖3 直接啟動(dòng)轉(zhuǎn)速特性
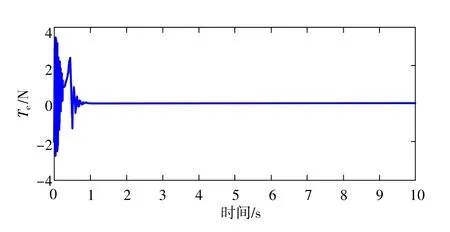
圖4 直接啟動(dòng)轉(zhuǎn)矩特性
由圖2、圖3和圖4可知,大容量異步電動(dòng)機(jī)直接啟動(dòng)時(shí),有啟動(dòng)時(shí)間短、轉(zhuǎn)速上升速度快、輸出轉(zhuǎn)矩大的優(yōu)點(diǎn);但是,轉(zhuǎn)子啟動(dòng)電流比較大,達(dá)到了額定電流的4~7倍甚至更高,轉(zhuǎn)速達(dá)到穩(wěn)定之前有個(gè)短暫的波動(dòng)過(guò)程,直接啟動(dòng)時(shí)的沖擊電流電機(jī)本身以及電力系統(tǒng)的沖擊不可忽視。隨著異步電機(jī)容量的進(jìn)一步增大,其沖擊電流也會(huì)增大,如圖5所示。
3.2 轉(zhuǎn)子串聯(lián)電阻啟動(dòng)特性仿真
轉(zhuǎn)子串聯(lián)啟動(dòng)的特點(diǎn)是異步電動(dòng)機(jī)啟動(dòng)時(shí)在電動(dòng)機(jī)轉(zhuǎn)子側(cè)串聯(lián)接入合適的電阻,以減小啟動(dòng)電流和增大啟動(dòng)轉(zhuǎn)矩。
仿真時(shí),仿真時(shí)間設(shè)置為10s。經(jīng)過(guò)0.1s將轉(zhuǎn)子側(cè)電阻短接。并測(cè)量異步發(fā)電機(jī)的定子和轉(zhuǎn)子電流以及轉(zhuǎn)速相關(guān)參數(shù)。仿真結(jié)果如圖6和圖7所示。
從仿真圖中可以看出,經(jīng)0.1 s將電阻短接后,電機(jī)轉(zhuǎn)子電流有略微的波動(dòng),電機(jī)將在波動(dòng)的電磁轉(zhuǎn)矩Te的作用下,逐漸加速到額定轉(zhuǎn)速,通過(guò)與直接啟動(dòng)的啟動(dòng)電流比較,可以清楚地看到啟動(dòng)電流的波動(dòng)明顯減少。
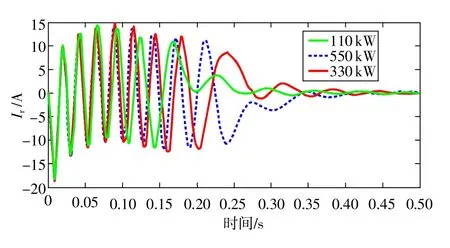
圖5 不同容量異步電機(jī)直接啟動(dòng)電流特性
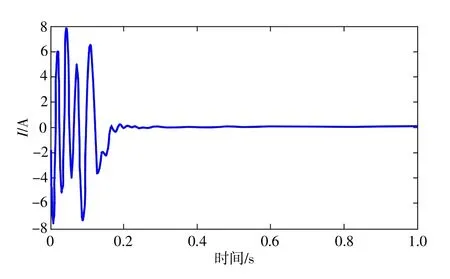
圖6 轉(zhuǎn)子串電阻啟動(dòng)電流
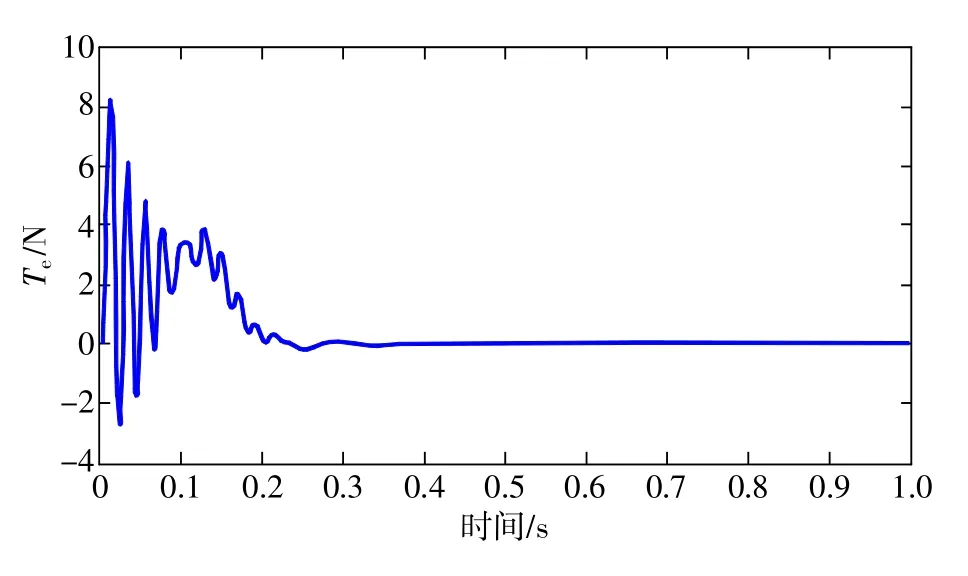
圖7 轉(zhuǎn)子串電阻啟動(dòng)轉(zhuǎn)矩特性
3.3 大容量異步電動(dòng)機(jī)軟啟動(dòng)特性仿真分析
晶閘管軟啟動(dòng)方式相對(duì)于直接啟動(dòng),在電路上有明顯不同。它是在電源與異步電動(dòng)機(jī)之間,加入了晶閘管控制電路,通過(guò)控制晶閘管的觸發(fā)角來(lái)改變輸出電壓,晶閘管軟啟動(dòng)仿真模型利用Matlab進(jìn)行搭建。
仿真時(shí),將仿真時(shí)間設(shè)置為10s,為了較好觀測(cè)啟動(dòng)電流特性,設(shè)置仿真啟動(dòng)時(shí)間為2s。并測(cè)量異步發(fā)電機(jī)的定子和轉(zhuǎn)子電流以及轉(zhuǎn)速相關(guān)參數(shù)。仿真結(jié)果表明:軟啟動(dòng)時(shí),啟動(dòng)電流和轉(zhuǎn)速特性有明顯改善。啟動(dòng)電流特性和轉(zhuǎn)速特性如圖8和圖9所示。
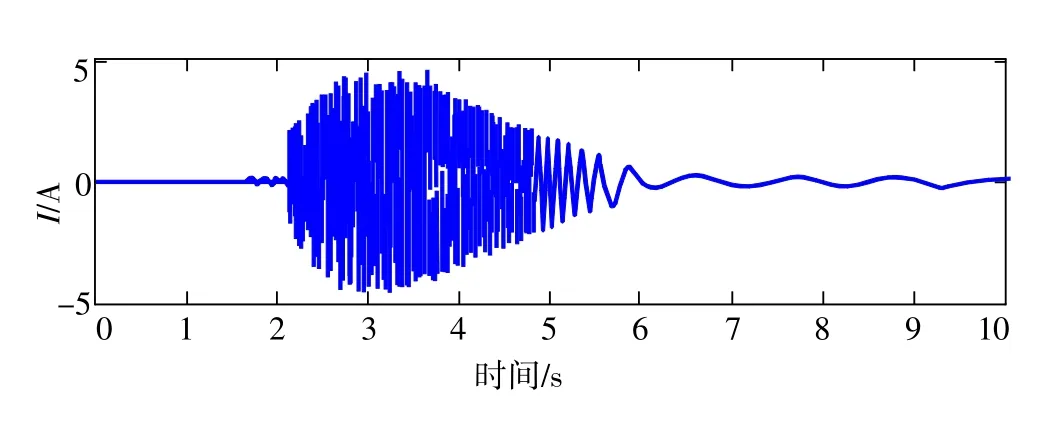
圖8 軟啟動(dòng)轉(zhuǎn)子電流特性
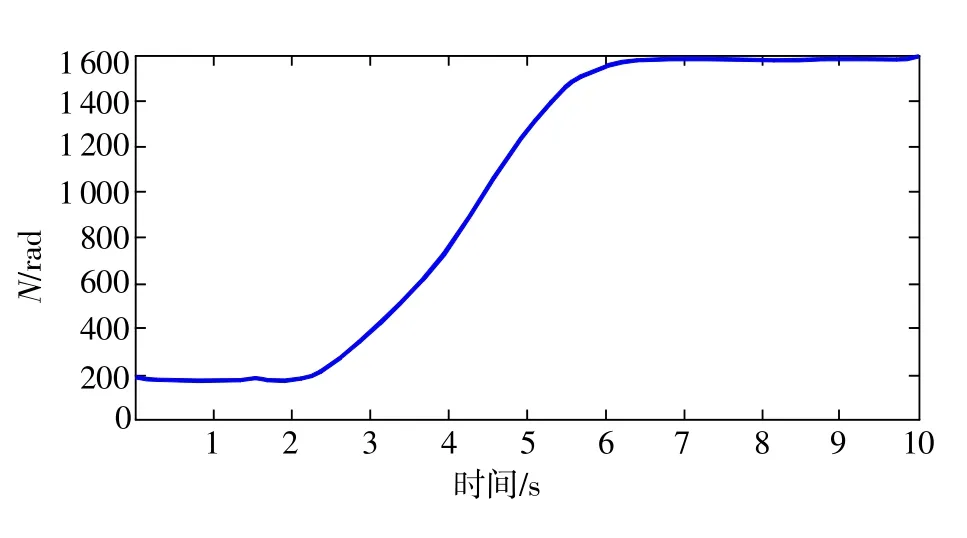
圖9 軟啟動(dòng)轉(zhuǎn)速特性
由圖8和圖9可知,大容量異步電動(dòng)機(jī)軟啟動(dòng)時(shí),啟動(dòng)時(shí)間較長(zhǎng),轉(zhuǎn)速上升速度較為平緩;但是,轉(zhuǎn)子啟動(dòng)沖擊電流大大得到改善,啟動(dòng)過(guò)程中啟動(dòng)電流能夠平穩(wěn)上升,電動(dòng)機(jī)能夠平穩(wěn)啟動(dòng)。大容量異步電動(dòng)機(jī)啟動(dòng)過(guò)程對(duì)電網(wǎng)和電機(jī)自身的沖擊得到明顯改善,保證了大容量電動(dòng)機(jī)的安全運(yùn)行。
經(jīng)過(guò)對(duì)直接啟動(dòng)、轉(zhuǎn)子串電阻啟動(dòng)和軟啟動(dòng)的仿真可以看出,3種啟動(dòng)方式之間各有特點(diǎn)。
1)大型電動(dòng)機(jī)直接啟動(dòng)時(shí),啟動(dòng)沖擊電流很大,并且隨著電機(jī)容量的不斷增大,沖擊電流越來(lái)越大,震蕩時(shí)間加長(zhǎng)。
2)轉(zhuǎn)子串聯(lián)電阻啟動(dòng)的啟動(dòng)特性與直接啟動(dòng)特性差別不大,但是能夠減小啟動(dòng)電流和增大啟動(dòng)轉(zhuǎn)矩。
3)軟啟動(dòng)可以很好地控制大容量電動(dòng)機(jī)啟動(dòng)時(shí)的電流,有效降低啟動(dòng)時(shí)引起的電網(wǎng)壓降。
4 結(jié)束語(yǔ)
本文針對(duì)異步電動(dòng)機(jī)容量配置需求越來(lái)越大的趨勢(shì),對(duì)大容量電機(jī)啟動(dòng)特性進(jìn)行分析,以此做出啟動(dòng)時(shí)對(duì)電網(wǎng)以及電機(jī)自身的危害評(píng)估。通過(guò)對(duì)大容量異步電動(dòng)機(jī)直接啟動(dòng)、轉(zhuǎn)子串聯(lián)電阻和軟啟動(dòng)3種啟動(dòng)方式分別進(jìn)行仿真分析,對(duì)大容量異步電動(dòng)機(jī)的啟動(dòng)特性有了較為全面的了解,給大容量電動(dòng)機(jī)啟動(dòng)方式的選擇提供了科學(xué)依據(jù)。
1)直接啟動(dòng)方式簡(jiǎn)單,但是當(dāng)電動(dòng)機(jī)容量較大時(shí)會(huì)產(chǎn)生較大的啟動(dòng)沖擊電流,比較適合小容量電動(dòng)機(jī)的啟動(dòng)。
2)轉(zhuǎn)子串電阻啟動(dòng)通過(guò)在轉(zhuǎn)子串加入適當(dāng)電阻可以減小啟動(dòng)電流和增大啟動(dòng)轉(zhuǎn)矩。比較適合于大容量電動(dòng)機(jī)輕載狀態(tài)的啟動(dòng)。
3)軟啟動(dòng)的啟動(dòng)時(shí)間較長(zhǎng),轉(zhuǎn)速平緩上升,啟動(dòng)沖擊電流大大減小,比較適合于大容量異步電動(dòng)機(jī)重負(fù)荷時(shí)的啟動(dòng)。
[1]徐維克.三相異步電動(dòng)機(jī)起動(dòng)方式的討論[J].航海技術(shù),2001(5):123-125.
[2]王國(guó)偉,林萬(wàn)里.三相異步電動(dòng)機(jī)啟動(dòng)特性研究[J].工業(yè)科技,2005(6):44-46.
[3]熊幸明,何新軍.基于Matlab的三相異步電動(dòng)機(jī)的起動(dòng)特性研究[J].電機(jī)電器技術(shù),2003(2):45-47.
[4]陶瑞蓮.基于Matlab三相異步電動(dòng)機(jī)起動(dòng)建模及仿真[J].南京工業(yè)職業(yè)技術(shù)學(xué)院學(xué)報(bào),2009(2):22-24.
[5]李紅梅,張敬華,李忠杰.異步電動(dòng)機(jī)數(shù)學(xué)模型及器件開關(guān)損耗計(jì)算[J].微電機(jī),2003(1):12-15.
[6]孫淼洋.淺析三相異步電動(dòng)機(jī)的啟動(dòng)分類[J].硅谷,2010(2):47-49.
[7]張清顏,凌世紀(jì).淺析三相異步電動(dòng)機(jī)軟啟動(dòng)的幾種方法[J].黑龍江科技信息,2009(5):111-113.
[8]辜承林,陳喬夫,熊永前.電機(jī)學(xué)[M].武漢:華中科技大學(xué)出版社,2005:27-30.
[9]林飛,杜欣.電力電子應(yīng)用技術(shù)的Matlab仿真[M].北京:中國(guó)電力出版社,2009:93-170.
[10]耿大勇,賈丹,李振剛.基于Simulink異步電動(dòng)機(jī)軟啟動(dòng)控制系統(tǒng)的仿真[J].遼寧工學(xué)院學(xué)報(bào),2006(6):141-144.
[11]Zenginobuz G,Cadirci I,Ermis M.Softstarting of large induction motors at constant current withminimized starting torque pulsation[J].IEEE Transaction Onindustry Applications,2001(9):61-64.
[12]Zenginobuz Z,Cadieri M,Barlak E C.Soft starting of large induetion motors at constant current with minimized starting torque pulsations[J].Industry Applieations Conferenee,2000(26):1593-1604.
Simulation analysis of starting characteristic for large capacity asynchronous motor
WAN Yu-jing1,QIU Li-wei1,CHEN Jing-rong1,WANG Li-lai2,LI Shun2,LIU Nian2
(1.CNNC Nuclear Operation Management Co.,Ltd.,Haiyan 314300,China;2.School of Electrical Engineering and Information,Sichuan University,Chengdu 610065,China)
For the problem about the starting characteristics of large capacity asynchronous motor,the mathematical control models of the large capacity asynchronous motor are presented for the direct starting,the rotor resistance starting and the soft starting.The starting control characteristics of the large capacity asynchronous motor are analyized by Matlab/Simulink software.Based on the mathematical model analysis and the simulation analysis for the large capacity asynchronous motor,the results can provid an effective scientific evidence for the saving-energy and the starting mode selection of asynchronous motors.
asynchronousmotoroflarge capacity;mathematicalmodel;starting characteristic;simulation analysis
TM343+.2;TK018;TP391.9;TP274
:A
:1674-5124(2014)06-0132-05
10.11857/j.issn.1674-5124.2014.06.034
2014-02-17;
:2014-05-05
萬(wàn)玉晶(1983-),男,工程師,主要從事繼電保護(hù)檢修及管理工作。