基于魯棒Kalman濾波的獵掃雷作戰過程建模及效果評估
2014-03-08 06:43:12任東彥孫明太周利輝
艦船科學技術 2014年4期
關鍵詞:模型
任東彥,孫明太,周利輝
(海軍航空工程學院青島校區,山東青島 266041)
基于魯棒Kalman濾波的獵掃雷作戰過程建模及效果評估
任東彥,孫明太,周利輝
(海軍航空工程學院青島校區,山東青島 266041)
針對混布雷陣在獵掃雷作戰效果評估中評估精度差的問題,采用時變帶未建模動態系統對獵掃雷作戰過程建模,通過引入帶未知時變均值和方差陣的虛擬白噪聲來補償獵掃雷作戰數學模型建立過程中簡化帶來的未知模型誤差,并采用魯棒Kalman濾波器對作戰效果進行評估。仿真結果表明,該方法可有效改善Kalman濾波器的性能,對混布雷陣有很好的評估效果,評估過程和評估效果更貼近實際。
作戰效果評估;魯棒Kalman濾波器;虛擬噪聲補償技術
0 引言
獵掃雷作戰效果評估是衡量反水雷作戰成功與否的根本標準。研究獵掃雷作戰效果評估問題時,首先必須建立獵掃雷作戰過程數學模型。在這項工作中,必須全面考慮評估需求、已知條件和評估手段,深入了解作戰過程的本質和具體過程,在合理簡化的基礎上實現數學抽象,得到作戰過程最基本的規律;其次必須針對模型及相應的觀測數據,提出可靠的評估方法[1]。將復雜的獵掃雷作戰過程與現代最先進的理論算法聯系起來,可以充分利用這些理論成果,從而使獵掃雷作戰效果評估方法上升到理論高度。
獵掃雷作戰效果評估問題,歸根到底是誤差處理問題。獵掃雷作戰過程中涉及的數據很多,而每個數據都多少存在誤差,其中既有系統性的,又有隨機性的。如果所有數據的誤差情況都分別考慮,最終將導致評估模型過于復雜,其穩定性、可靠性都難以得到充分保證,因此必須對其進行簡化[2-3]。但如果模型過于簡化,必然導致評估結果不切實際,評估失去意義。本文考慮帶未建模動態 (即帶未知模型誤差)系統的自適應Kalman濾波問題,相應的自適應Kalman濾波器叫做魯棒Kalman濾波器。采用改進濾波器性能的虛擬噪聲補償技術,通過引入帶未知時變均值和方差陣的虛擬白噪聲來補償獵掃雷作戰數學模型建立過程中簡化帶來的未知模型誤差,對獵掃雷作戰過程建模,并采用相應的Kalrmn濾波器對作戰效果進行評估。
1 基于魯棒Kalman濾波的獵掃雷作戰過程建模
根據評估方法的不同,對獵掃雷作戰過程建立不同的數學模型。統計類評估技術從概率統計的角度,通過對觀測數據的處理,獲得評估對象的估計值。在這類技術中,必須對系統建立隨機模型,以便對觀測數據進行處理。文獻 [1]建立了如下獵掃雷作戰過程數學模型:
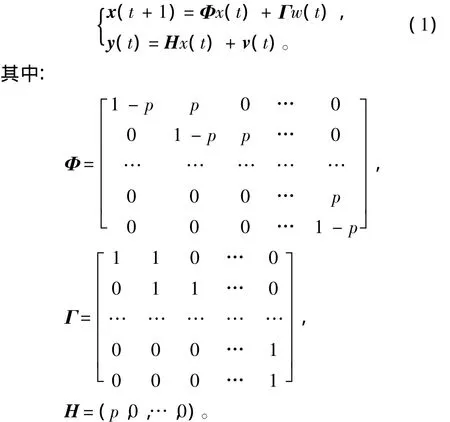
然而,獵掃雷作戰過程中需要考慮的因素很多,涉及的每個數據都多少存在誤差。上述模型在采用最優Kalman濾波器進行作戰效果評估時,雖然計算方便,但由于建模過程的簡化,直接導致評估結果由最優退化為次優。最優Kalman濾波器要求精確已知系統的模型 (包括噪聲統計),然而在許多實際應用問題中模型常常近似、帶有未知誤差[4-5]。這種未知的模型誤差叫做未建模動態,它是相對于假設存在系統的一個精確的模型而言的。帶未建模動態系統的自適應Kalman濾波器稱為魯棒Kalman濾波器,具有重要的工程應用價值。未建模動態可能來源于:對系統的機理沒有完全掌握,或由于簡化模型帶來的未知模型誤差,或由于系統 (過程)的時變性引起模型參數和噪聲統計的未知漂移。
考慮在一般狀態空間模型中,狀態轉移陣和觀測陣兩者均含有未知模型誤差的情形,通過引入帶未知時變噪聲統計的虛擬噪聲來補償模型誤差,把問題歸結為帶未知時變噪聲統計系統的自適應Kalman濾波問題,利用時變噪聲統計估值器,采用帶未建模動態系統的一種統一和通用的魯棒Kalman濾波技術——虛擬噪聲補償技術對獵掃雷作戰過程建模[2]。結合魯棒Kalman濾波技術,建立改進的獵掃雷作戰過程數學模型,過程如下:
參考式(1),獵掃雷作戰過程為線性離散隨機系統:
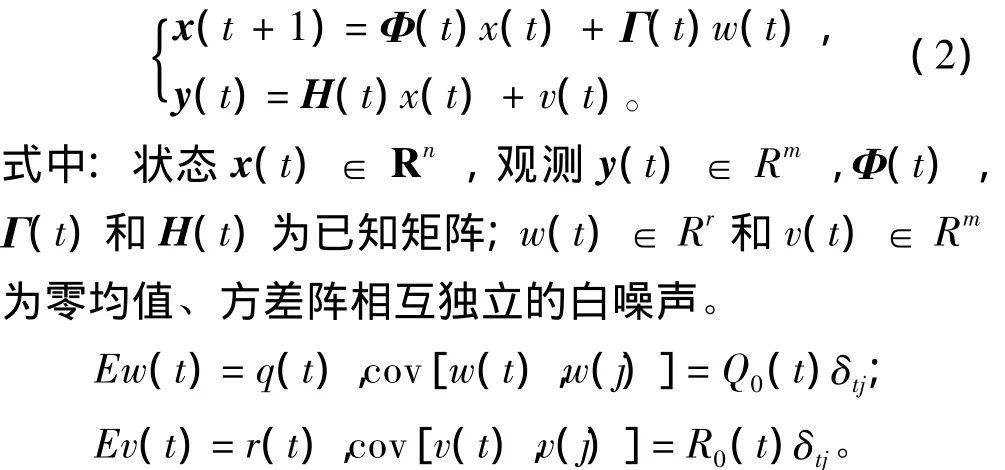
假設系統是帶未知模型誤差系統,即真實系統不是式(2),而是

其中,狀態轉移陣Φ(t)的誤差ΔΦ(t)和觀測陣H(t)的誤差ΔH(t)未知,但Φ(t)和H(t)已知。因此,即使噪聲統計已知,對帶模型誤差系統進行常規Kalman濾波也會使濾波器性能變壞。為了補償模型誤差,將真實系統改寫為:

定義虛擬模型噪聲 ξ(t)和虛擬觀測噪聲η(t)為

虛擬噪聲ξ(t)補償了狀態模型誤差ΔΦ(t)x(t),虛擬噪聲η(t)補償了觀測方程誤差ΔH(t)x(t)。通常,模型誤差項ΔΦ(t),ΔH(t)相對于Φ(t),H(t)而言較小,因此,可近似假設虛擬噪聲ξ(t)和η(t)是帶未知時變噪聲統計的相互獨立的白噪聲:

于是,對真實系統(3)的濾波問題轉化為帶未知時變噪聲統計系統(4)的自適應Kalman濾波問題。式(4)即為改進的獵掃雷作戰過程數學模型。
2 基于魯棒Kalman濾波的獵掃雷作戰效果評估
2.1 魯棒Kalman濾波器方程組
在卡爾曼濾波技術中,當對模型某一部分了解不深入,存在較大模型誤差,或系統模型及誤差為時變時,會影響濾波精度,采用魯棒Kalman濾波器可以補償未知模型誤差。含有未建模動態ΔΦ(t)和ΔH(t)的系統(4)應用虛擬噪聲補償技術有如下Kalman 濾波器[2]:
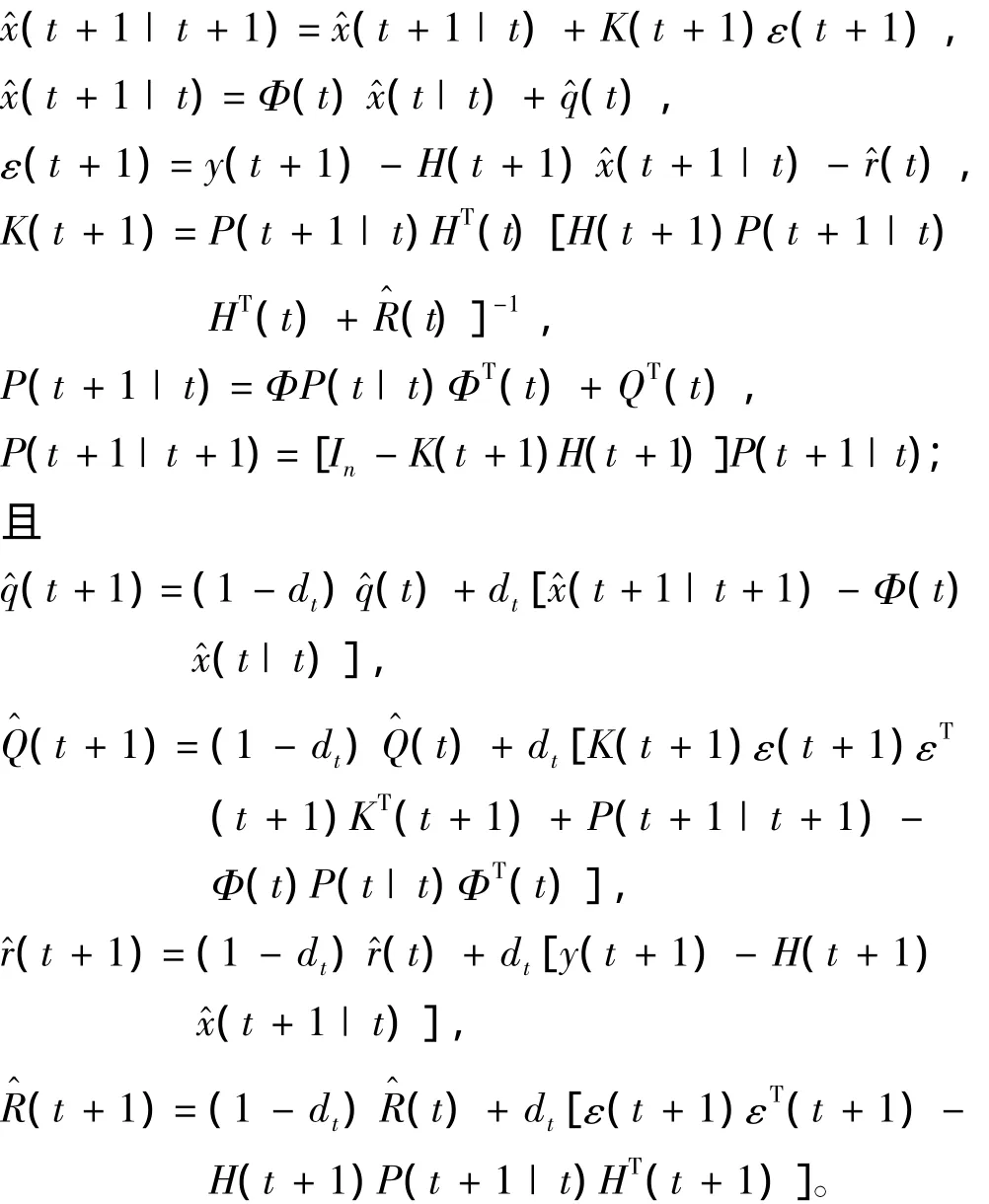
上述方程組構成了一個卡爾曼濾波器。標準的卡爾曼濾波器有一個重要特點,即狀態轉移誤差方差陣Q(t)在濾波器中不是常數,每次都必須重新計算。由于它受到被估計狀態X的影響,使標準卡爾曼濾波器退化為次優。而魯棒Kalman濾波器狀態轉移誤差方差陣Q(t)和R(t)雖然也是時變的,但虛擬噪聲補償技術補償了未知模型誤差,相對來說有可能會提高估計精度,它的性能如何,必須通過仿真試驗和實際應用證明。
2.2 初始條件
為使計算能正常開始,必須提供初始值X0/0和P0/0。通常根據歷史經驗和實際情況,可以確定比較合理的初始值,從而改善計算結果。但對初始值完全未知時,魯棒Kalman濾波器仍然可以進行,它可以根據不斷取得的觀測值,逐漸修正估計結果,并迅速接近真實情況。正因為如此,在工程上經常針對初始值完全未知的情況,對X0/0取0值,對P0/0取一個比較大的值,經過若干步計算后,初始值誤差的影響將會消失。
實際搜掃過程中,每當搜掃工具對雷區完成一次作用后,便可得到一個新的觀測數據,將這個新的觀測數據代入上述方程組,便可由上一個X和P計算出新的X和P,如此反復,X就會逐漸逼近實際狀態,從而了解目前雷區內水雷的實際狀態。
3 仿真試驗結果與分析
情形1:設w(t)的均值q=0和方差Q=0.001已知,取初值(0|0)=[30 0 0],p=0.3,采用模型 (1)對獵掃雷作戰過程建模,可得最優Kalman濾波器0(t|t)。
情形2:取帶誤差的模型,且取帶誤差的噪聲統計q=0,Q=0.001,取初值為(0|0)=[30 0 0],p=0.2,采用模型(1)對獵掃雷作戰過程建模,可得次優Kalman濾波器s(t|t)。
情形3:取帶補償模型誤差系統,采用模型(4)對獵掃雷作戰過程建模,可得魯棒Kalman濾波器(t|t)。其中ξ(t)為帶未知時變統計的虛擬白噪聲,取ξ(t)的均值和方差的初值為q^=0,Q^=0.001,仍取(0|0)=[30 0 0],p=0.3,搜掃概率誤差在-0.1~0.1之間,且b=0.9。
通過作戰過程的仿真,得到1組觀測數據和真實數據。將這組觀測數據輸人到濾波方程中,得到估計值。最后計算出真實狀態和估計狀態之間的誤差。
由于本問題屬于小子樣估計,相同條件下的仿真結果會呈現隨機變化,因此對每組不同條件,均仿真200組,求取其結果的均值和方差。表1列出估計維數為3,觀測誤差方差R為1.5的條件下,對不同情況進行仿真后所得到的結果。
考慮在防御布雷作戰中,水雷定次不會太高。同時,考慮到掃雷概率高的情況下,水雷會很快被掃除,仿真數據會迅速收斂。為了檢驗評估算法的有效性,故對3種情形采用低概率情況下的3種雷陣進行仿真,結果如下:
1)雷陣1~30枚定次為1次的水雷。
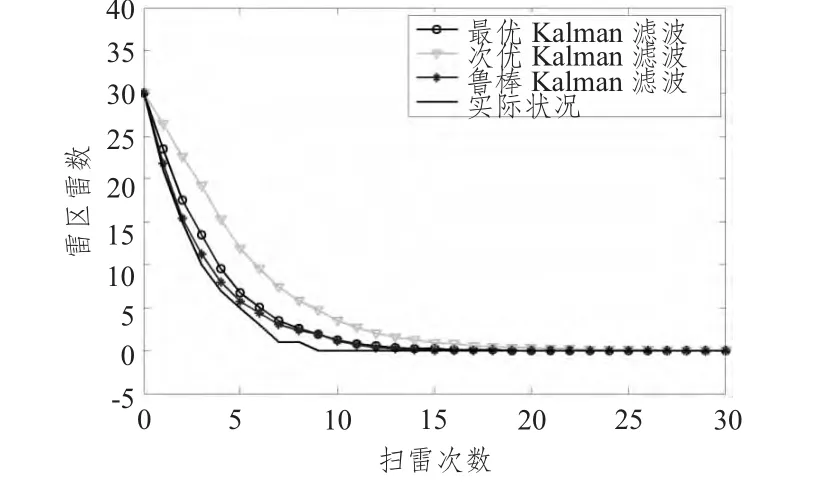
圖1 最優濾波、次優濾波和魯棒Kalman濾波的比較Fig.1 Compare of optimal filter,suboptimal filter and robust Kalman filter
2)雷陣2~10枚定次為1次的水雷+10枚定次為2次的水雷+10枚定次為3次的水雷。
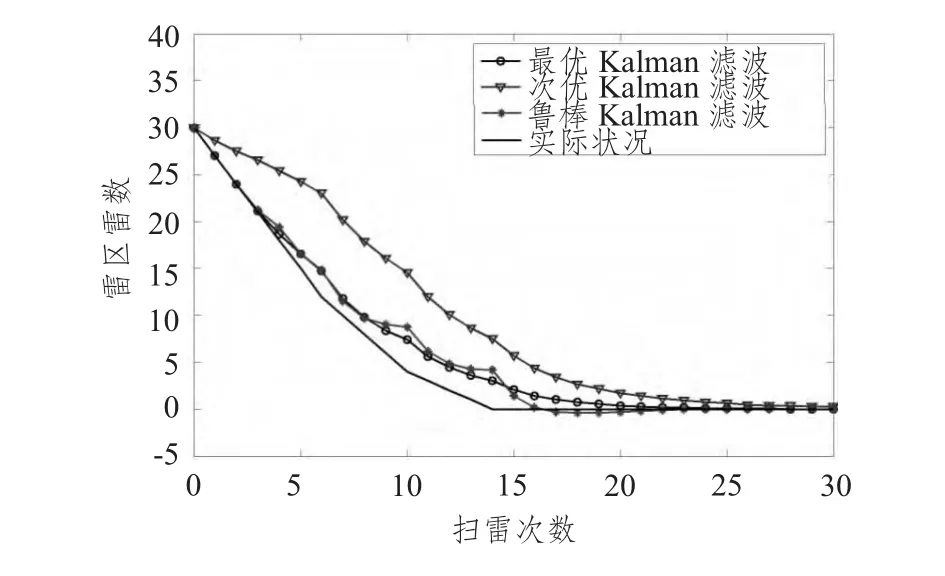
圖2 最優濾波、次優濾波和魯棒Kalman濾波的比較Fig.2 Compare of optimal filter,suboptimal filter and robust Kalman filter
3)雷陣3~30枚定次為1次的水雷+30枚定次為3次的水雷。
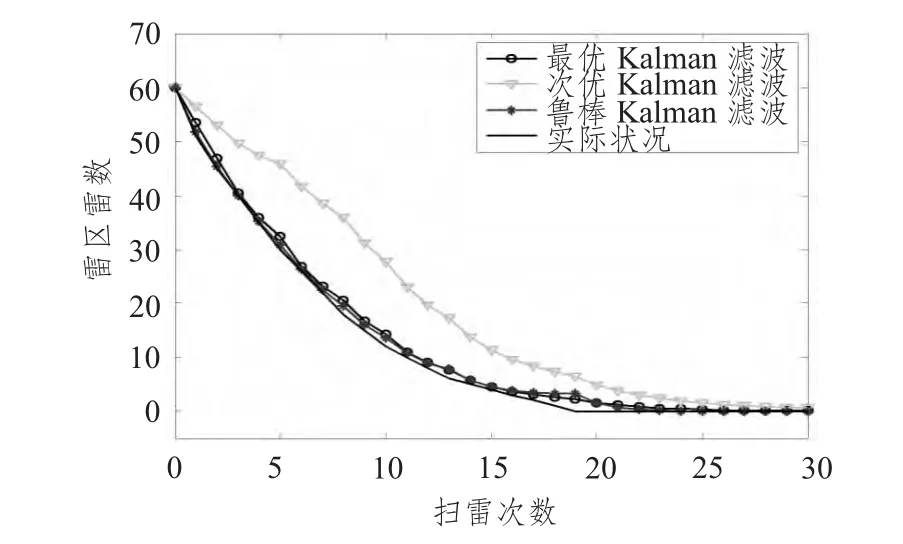
圖3 最優濾波、次優濾波和魯棒Kalman濾波的比較Fig.3 Compare of optimal filter,suboptimal filter and robust Kalman filter
3種評估方法對3個雷陣的評估誤差均值統計信息如表1所示。
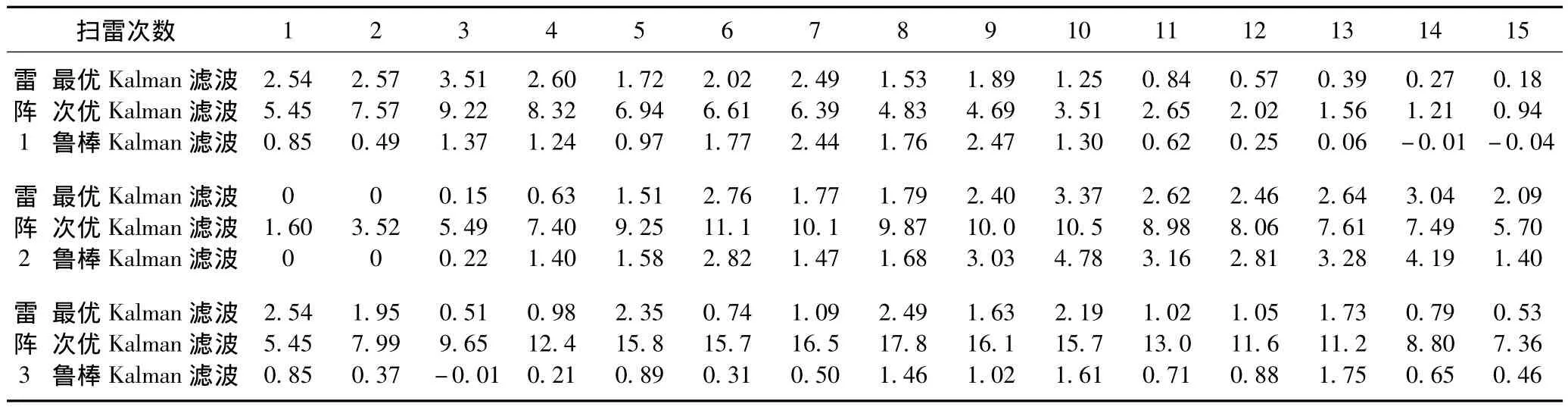
表1 3種典型雷陣的誤差均值統計信息表Tab.1 Statistical information ofmean error in three typicalmine obstacle
4 結語
本文在全面考慮獵掃雷作戰效果評估需求和已知條件,深入解獵掃雷作戰過程本質和具體過程的基礎上,結合虛擬噪聲補償技術對獵掃雷作戰過程建模,在合理簡化的基礎上實現更貼近實際的數學抽象,并采用魯棒Kalman濾波技術對作戰效果進行評估。仿真結果表明了該評估方法的有效性,尤其對混布雷陣有很好的評估效果,比最優Kalman濾波器濾波精度更高。對比評估結果可看出,對實際雷數的估計結果,采用魯棒Kalman濾波技術與實際情況更為接近。
[1]馬愛民.獵掃雷作戰效果評估與控制[M].北京:國防工業出版社,2000:70-73.
[2]鄧自立.自校正濾波理論及其應用——現代時間序列分析方法[M].哈爾濱:哈爾濱工業大學出版社,2003:179-181.
[3]周洪光,周璽,夏朗.反水雷武器系統作戰效能評估方法初探[J].水雷戰與艦船防護,2010,18(4):32 -36.
ZHOU Hong-guang,ZHOU Xi,XIA Lang.Preliminary study on the operational efficiency evaluafion methods of MCM weapon system[J].Mine Warfare and Ship Self-Defence,2010,18(4):32 -36.
[4]黃賢源,隋立芬,范澎湃.幾種最優濾波方法的分析和比較[J].測繪工程,2007,16(3):35 -38.
HUANG Xian-yuan,SUI Li-fen,FAN Peng-pai.Analyses and comparisons of some filtermethods[J].Engineering of Surveying and Mapping,2007,16(3):35 -38.
[5]李華,李慶民,劉君.一種基于遺傳算法的“正向”掃雷效果評估解法[J].探測與控制學報,2007,29(6):36-40.
[6]洪星,宋元,馬愛民.馬爾可夫鏈用于掃雷作戰期望損失評估探討[J].兵工學報,2006,27(6):1132 -1135.
HONG Xing,SONG Yuan,MA Ai-min.The applications of Markov chains to estimating expected casualties of naval mine-sweepin[J].Actaarmamentarll,2006,27(6):1132-1135.
Operationalmodeling and effect evaluation ofm ine-hunting and m ine-sweeping based on robust Kalman filter
REN Dong-yan,SUN Ming-tai,ZHOU Li-hui
(Qingdao Branch of Naval Aeronautical and Astronautical University,Qingdao 266041,China)
According to the bad precision of the interweaving mine obstacle in operational effect evaluation ofmine-hunting and mine-sweeping,the operational model of mine-hunting and mine-sweeping was established through using time-varying unmodeled dynamics system.The unknown error of math modeling which was predigested was compensated by fictitious noise compensation technique through introducing the unknown time-varyingmean and variance matrix,and the robust Kalman filter was used for operational effect evaluation.The simulation research testified that the method can effectively improve the performance of Kalman filter and have good operational effect for interweavingmine.The operational process and effectwasmuch more close to the fact.
operational effect evaluation;robust Kalman filter;fictitious noise compensation
TJ01
A
1672-7649(2014)04-0143-04
10.3404/j.issn.1672-7649.2014.04.031
2013-03-12;
2013-04-18
任東彥(1985-),男,博士研究生,主要從事海軍兵種及武器系統作戰仿真研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19