一種多參數小型化飛機結構腐蝕環境監測技術
2014-03-13 03:49:10常鳴袁慎芳王長春
裝備環境工程 2014年6期
常鳴,袁慎芳,王長春
(1.南京航空航天大學機械結構力學及控制國家重點實驗室,南京210016; 2.揚州大學水利與能源動力工程學院,江蘇揚州225000)
一種多參數小型化飛機結構腐蝕環境監測技術
常鳴1,2,袁慎芳1,王長春1
(1.南京航空航天大學機械結構力學及控制國家重點實驗室,南京210016; 2.揚州大學水利與能源動力工程學院,江蘇揚州225000)
摘.要.目的研究腐蝕與環境條件之間的關系,提出一種用于飛機腐蝕環境監測的小型化監測節點的實現方法。方法針對影響腐蝕的4個關鍵環境參數(溫度、相對濕度、濕潤時間和氯離子濃度),研究其傳感方法并研發選型相應傳感器。在此基礎上設計基于MSP430處理器的多參數飛機腐蝕環境監測節點。結果通過實驗驗證了節點中的溫濕度傳感器、濕潤時間傳感器和電化學傳感器的適用性,能夠完成對環境參數的的測量。結論設計的節點滿足機載裝置小型化、輕量化的要求,可以實現在線的腐蝕環境監測,從而保障飛行安全。
飛機結構;腐蝕環境監測;多參數;監測節點
飛機結構腐蝕的隨機性大、類型多樣,腐蝕損傷又直接影響著飛機的剩余壽命,關乎飛行安全,因此研究腐蝕的控制方法尤為重要。以往飛機的腐蝕研究關注于防腐蝕設計以及腐蝕后的檢測與維修[1—2],主要是利用各種無損檢測技術發現并確定飛機腐蝕的位置。如超聲成像、超聲C掃描、磁光成像、渦流檢測等[3],都是在腐蝕已經發生的情況下定位腐蝕,根據損傷情況采取相應補救措施。在JSF(Joint Strike Fighter)項目引入了故障預測與健康管理(Prognostics and Health Management, PHM)技術后,飛機的腐蝕預測逐漸得到了重視[4]。飛機腐蝕環境監測就是基于此提出的,指針對飛機結構的特點,在一些易發生腐蝕的部位安裝監測節點,實時采集周圍的環境參數,經過信號調理后上傳至客戶端建立數據庫。以此對環境的變化進行分析,預測腐蝕發生的可能性,盡早對飛機進行維護,減小因腐蝕發生造成的損失[5]。
JSF項目的SPHM(Structural PHM)團隊就承擔了為F-35設計綜合性抗腐蝕環境傳感器的任務,預測腐蝕損傷。除此之外,美國的Honeywell實驗室設計了腐蝕環境監測設備,Boeing公司和澳大利亞的CSIRO合作開發了飛行器結構腐蝕預診斷方法, Luna Innovations研制了機載無線腐蝕環境監測系統[5—7],越來越多的科研機構投入到飛機腐蝕環境監測的研究中。
文中根據飛機腐蝕環境監測的需求,確定了影響腐蝕的4個環境參數:溫度、相對濕度、濕潤時間和氯離子濃度。選型了溫濕度傳感器,研制了測量濕潤時間和氯離子濃度的傳感器。在此基礎上,設計研發了小型化的多參數腐蝕環境監測節點,能夠控制多傳感器實現在線的環境監測,從而為飛機腐蝕預測提供一定的研究基礎。
1 多參數腐蝕環境的傳感方法研究
飛機結構腐蝕的成因是多方面的,溫濕度是最關鍵的因素,其他如結構表面的濕潤狀況、氯化物的污染也是航空金屬腐蝕的重要原因。鹽霧是一種常見的飛機腐蝕成因,在鹽霧這種氯離子濃度較高的場合,氯化物會沉降在飛機外表面或隨冷凝水滯留在內部,易形成電解質溶液而加速結構腐蝕[8—9]。因此,選取溫度、相對濕度、濕潤時間和氯離子濃度等4個參數對其進行長期監測,分別依靠溫濕度傳感器、濕潤時間傳感器和電化學傳感器來完成。其中溫濕度傳感器已經發展得較為成熟,可以直接選擇商用傳感器,而后兩種傳感器并沒有符合應用要求的在售。因此文中對相對應的濕潤時間傳感器與電化學傳感器的研發進行了探討。
1.1 溫濕度的測量
文中選擇了Sensirion公司生產的SHT15貼片封裝的溫濕度一體化傳感器,如圖1a所示。該傳感器將傳感元件和信號處理電路集成在一塊微型電路板上,輸出完全標定的數字信號,使用方便。
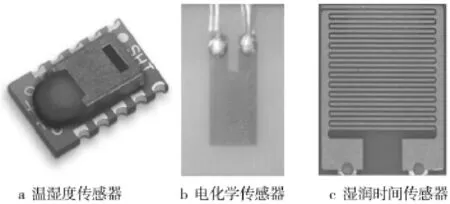
圖1 傳感器實物Fig.1 Photos of the sensors
SHT15溫濕度傳感器有著較高的測量精度和分辨率,測溫范圍為-40~123.8℃,相對濕度為0~100%,能滿足飛機環境監測的需求。除此之外,該傳感器體積小、功耗低,測量狀態時的功耗僅為3 mW,這些都為機載應用提供了便利條件。
1.2 氯離子濃度的測量
目前常見的氯離子測定方法有摩爾法、分光光度法、濁度法、離子色譜法等,但是這些測定儀器在質量、功耗、操作方法等方面不能滿足飛機安裝測試的要求。因此文中研制了電化學傳感器來監測氯離子濃度。
文中設計的電化學傳感器為雙電極柵狀結構,當傳感器暴露在潮濕的大氣中或處于有積水的地方,其表面會凝結一層水膜。這層水膜溶解了鹽類和其他雜質,形成了一定氯離子濃度的電解質溶液,給電化學腐蝕提供了條件。
該傳感器的測量原理類似于線性極化技術:首先等待電極的自腐蝕電位穩定,電極反應處于平衡狀態;之后對電極外加微小電壓進行極化,則正向和逆向的反應速度不相等,電流隨之發生變化。工作時對傳感器的電極施加微小電壓,實時監測輸出電流。這種方法本用來測算金屬的腐蝕速率,但得到的數據也與腐蝕環境的相關參數有關聯[10—11]。由于氯離子對電化學腐蝕有推動作用,文中利用制成的傳感器去監測溶液中氯離子的濃度。發現氯離子濃度越高,輸出電流就會越大,通過監測電流的變化即可獲取氯離子濃度的變化情況。
傳統的線性極化測量裝置都是三電極系統,由工作電極、參比電極和輔助電極組成。其中工作電極和參比電極的電極過程是一樣的,它們的腐蝕電位相近,加之極化時間很短,因此可以采用相同的材質制成這兩個電極;輔助電極僅供極化時完成通電回路使用,也可采用同樣的材質制成[12]。在設計中,傳感器采用一寬一窄兩電極代替了常見的三電極,選取較寬的電極同時充當參比電極和輔助電極,較窄的電極作為工作電極。這樣的結構便于制作,且易小型化,能實現對被測量對象變化趨勢的監測[10,13—14]。
文中關注的飛機蒙皮等通常采用LY12硬鋁材料,為了更好地呈現飛機的腐蝕狀況,傳感器的電極采用與其相同的材料。在非金屬支撐材料方面,為了保證其可靠、輕質,同時具備耐腐蝕的特性,選擇環氧樹脂板作為傳感器的底板。根據Wilson A等的研究[13],傳感器雙電極之間的間距越小,傳感器的靈敏度就越高。傳統工藝如銑削和激光切割等,制作時只能達到幾百微米的精度,因此在設計中選擇了正膠Lift-Off工藝制作該柵狀傳感器。通過真空蒸鍍在環氧樹脂襯底上牢固地鍍一層硬鋁的薄膜,由事先加工好的掩膜板結合光刻技術將柵狀電極的圖案刻在薄膜上。制成的兩個電極一個寬450 μm,另一個寬150 μm,電極之間間距只有20 μm。制成的傳感器靈敏度高、尺寸小(20 mm×9.3 mm),材質與被監測對象相同,適合應用要求。傳感器實物如圖1b所示。
1.3 濕潤時間的測量
腐蝕環境研究中的濕潤時間(Time Of Wetness, TOW)是指金屬暴露在空氣中表面持續濕潤的時間,是導致金屬在大氣中發生腐蝕的一個重要因素。當前對于濕潤時間的測量大多是通過綜合氣象站提供的氣象數據(相對濕度、降雨量等)統計得到的[15—16],而實際航空金屬表面的濕潤狀態成因復雜,需要設計專門的傳感器進行測量。
常用的濕潤時間傳感器是基于電偶腐蝕的原理,傳感器表面濕潤時,異金屬電極浸沒在電解質溶液中,伽伐尼電池被激活,輸出一定的電壓。該傳感器經過Sereda[17],Tomashov[18]等人的不斷發展,已在大氣腐蝕監測中較為常用。該類傳感器存在著電極材料易消耗,使用壽命不長,且電偶腐蝕會改變溶液成分而影響測量結果的缺點。綜合考慮到機載使用的需求,文中基于電阻式的原理設計制作了一種小尺寸的濕潤時間傳感器。
電阻式濕潤時間傳感器的主體部分為同種金屬制成的交叉指狀電極,如圖1c所示。當空氣干燥時,電極之間相互絕緣,傳感器的輸出電阻無窮大;若空氣濕度增大至表面凝結液滴,或有降雨、降雪、結露等現象發生,電極將被短路,輸出電阻大大降低。使用前設置一個臨界電阻值,當輸出電阻低于這一界限則認為表面已經濕潤,連續監測輸出數據即可記錄下傳感器表面的濕潤時間。
該傳感器的敏感元件為相同材質的雙電極,以往的制作方法是將材料加工成絲狀,平行纏繞在絕緣體上,構成檢測極。這種方法制作復雜,復現性不好,且對于電極寬度和電極間距的大小都難以精確控制。文中使用標準PCB制造技術,按照事先設計繪制好的圖形,在覆銅基板上蝕刻出2個等寬的300 μm的銅電極,使電極呈交叉指狀分布,相互絕緣且相互穿插。該傳感器的工作原理決定了電極間距越小,靈敏度越高,所以應用中的電極間距為PCB技術最精細的80 μm,即使表面上附著的微小液滴也能被感知到。此外,該傳感器需要長期暴露在外部環境中,而銅電極裸露在空氣中會很快被腐蝕損壞,因此在電極上再覆蓋一層金進行保護。濕潤時間傳感器的整體尺寸為22 mm×20 mm,體積小、壽命長、制作成本低,且電阻式的原理決定了其測量電路也較簡單,很適合機載使用。
2 多參數飛機腐蝕環境監測節點的設計與實現
2.1 多參數飛機腐蝕環境監測節點的構架
考慮機載監測的特點,為實現輕量化和小型化,研制了用于多腐蝕環境參數監測的小型化監測節點。飛機PHM系統對結構腐蝕環境的監測是個長期的過程,因此節點需要能夠獨立、長時間的工作。節點設計時主要考慮了小尺寸、低功耗、獨立的電源供給、數據處理與本地存儲能力、用戶應答下載等要求。
節點的整體構架設計如圖2所示,分為測量模塊與主控模塊等2部分。其中主控模塊以TI公司超低功耗的16位混合信號處理器MSP430F169為核心,片內集成有多個DAC,ADC和串口通訊模塊,資源豐富,符合設計需求。通過該芯片可實現對傳感測量、數據采集與處理、存儲等的控制。測量模塊則包括了傳感器及其測量電路。
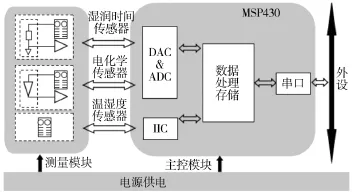
圖2 監測節點構架Fig.2 Structure of the monitoring node
2.2 硬件設計與實現
按照基本構架對節點的硬件按模塊進行設計,制成的實物如圖3所示。對環境的監測需要傳感器與被測環境直接接觸,為此,節點設計為上下2層。上層是測量模塊,其中傳感器暴露在外,而電路可以后期通過封裝外殼加以保護;下層為主控模塊,實現對3種傳感器的控制管理。整個節點體積小(70 mm×50 mm×20 mm),適合在飛機的狹窄空間使用。
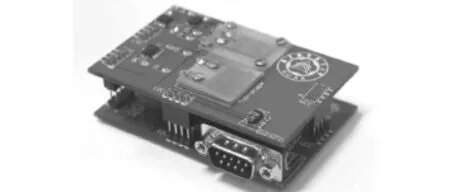
圖3 監測節點實物Fig.3 Photo of the monitoring node
測量模塊主要是3種傳感器以及相應的測量電路。其中SHT15傳感器的接口電路為一種類IIC的數字串行接口,對該傳感器的測量控制由MSP430來實現。芯片和傳感器的數據線、時鐘線相互連接,按照傳感器給定的通訊協議,通過發送指令建立通訊,完成對溫濕度的實時測量。
濕潤時間傳感器和電化學傳感器的測量方式都屬于被動式測量,其測量過程都由外部激勵主動觸發來實現。濕潤時間的測量如圖4a所示,對傳感器施加激勵電壓VTS,通過分壓電路將傳感器電阻轉化為電壓,再放大和濾波后得到輸出電壓VTO。電化學傳感器的測量電路與濕潤時間相似,不同的是通過測量其極間電流而非電阻來實現,如圖4b所示。待自腐蝕電位穩定后對電化學傳感器施加激勵電壓VES,兩級間產生一定的電流,極間電流再由轉換電路轉換為電壓,放大和濾波處理后得到輸出電壓VEO。
由于過大的激勵電壓容易引發進一步的電化學腐蝕,所以對這兩種傳感器的激勵都必須很小,節點選取的是20 mV。隨之而來的輸出信號也都較微弱,極易受到噪聲的干擾,因此它們的測量電路設計特別注重了對微小信號的去噪和放大。一是通過合理的接地設計,防止因為電位不平衡引入誤差;二是采用低偏置的運算放大器OPA602對輸出信號進行濾波和放大;另外,傳感器和電路的偏置采用軟件補償來消除。
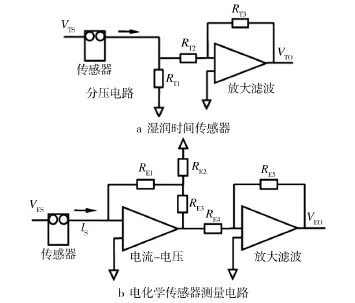
圖4 測量電路Fig 4 Measurement circuits
主控模塊除了控制測量模塊完成工作外,還可將測量數據存儲在MSP430的ROM以及Flash ROM里,解決了節點的數據存儲問題。此外,主控模塊還設計了串口通訊功能,設計以RS232通訊協議進行節點與外部設備之間的數據交換,片內存儲的測量數據可通過串口通訊讀出。
整個節點由9 V蓄電池供電,利用精度為1%的AMS1117轉換成MSP430所需的工作電壓(3.3 V),供電電路設計有電解電容、磁珠等器件進行濾波和去噪。耗能方面,該應用中傳感器監測的環境參數是變化極為緩慢的物理量,并不需要頻繁的測量。再加上MSP430F169的功耗管理極具優勢,可以通過關閉不同的晶振迫使核心操作系統進入休眠狀態,減少不必要的能耗。這些特點使得節點的使用壽命得到了保證。
2.3 飛機腐蝕環境監測實現方法
在飛機多個部位分布安裝該節點,連續采集環境參數,信號調理后存儲在本地,全面監測腐蝕環境。使用時還可將分布在各處的節點看成是傳感器結點,只需添加網絡適配器就可構成一個傳感器網絡,實現整個系統之間的通訊,如圖5所示。不同位置的傳感器結點將本地數據傳輸給網絡適配器,網絡適配器綜合管理各傳感器結點,并在適當的時機將數據上傳到客戶端進行存儲分析。
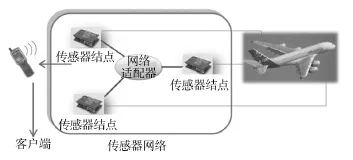
圖5 飛機腐蝕環境監測Fig.5 Schematic diagram for monitoring of aircraft corrosive environments
3 節點測試實驗
3.1 溫濕度傳感器測試
對溫濕度傳感器的驗證實驗在ACS-CH250型溫濕度箱內進行。設置箱內的起始溫度為5℃、濕度為5%,設定程序以步長5依次遞增溫濕度,每個值到達后保持1 h,確保箱內溫濕度值的穩定。通過節點控制SHT15每5 min采集1次數據,測量30 min后求其平均。計算每個測量點的測量結果與設定值的相對誤差,得到溫度測量的平均誤差為±0.7%,最大誤差為1.2%;濕度的平均誤差為±0.9%,最大誤差為1.9%。表明節點對溫濕度的測量與傳感器數據相符,測量精度較高。
3.2 電化學傳感器測試
為了驗證電化學傳感器對不同氯離子濃度的響應,分別選擇蒸餾水、質量分數為3%和5%的NaCl溶液作為反應溶液,測量電化學傳感器在其中產生的極化電流的大小。
將等量的3種溶液倒入3支燒杯,3片電化學傳感器分別置于其中。等待一段時間至自腐蝕電位穩定后,依次通過節點對傳感器施加激勵電壓,記錄傳感器對各自浸沒溶液的輸出,實驗結果如圖6所示。該實驗表明,3種溶液對應的傳感器輸出有較大區別,驗證了節點中的電化學傳感器對不同氯離子濃度的敏感性,可用于氯離子的監測。
實際腐蝕大氣中的氯離子濃度是很低的,達不到上述實驗中的條件。為了驗證該傳感器的實際應用價值,通過對不同低濃度的NaCl溶液進行測試,得到目前該傳感器可以甄別到的最低氯離子質量分數為0.5%。
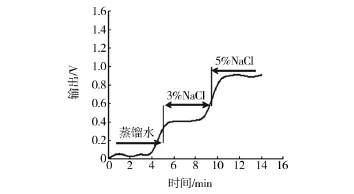
圖6 節點對不同氯離子濃度溶液的響應Fig.6 Output of monitoring node with electrochemical sensors immersed in solutions of different chloride ion concentrations
3.3 濕潤時間傳感器測試
取1組濕潤時間傳感器,置于溫濕度箱內,控制箱內溫度為25℃,調節濕度依次增大,通過節點測量傳感器在60%,70%,80%,90%濕度條件下的輸出電阻。按照前述的工作原理,隨著箱內空氣的相對濕度越來越高,輸出電阻應該相應地減小,實際測出數據取其平均后見表1。該實驗表明濕潤時間傳感器對表面的濕潤情況敏感,可用于濕潤時間的測量。
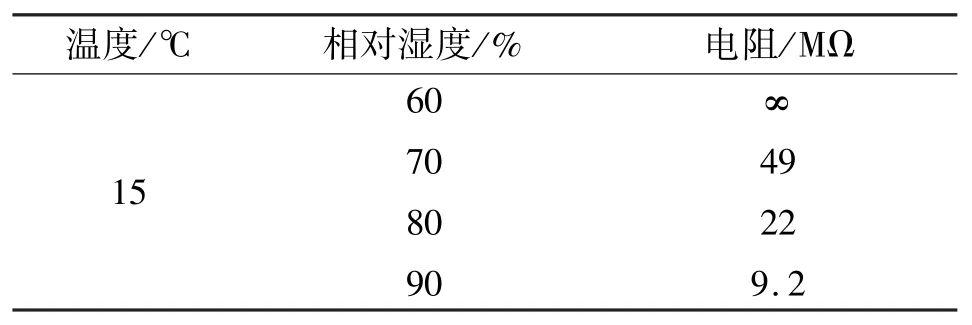
表1 濕潤時間傳感器電阻值Table 1 Resistance of the TOW sensor
以上在實驗室中驗證了監測節點的有效性,但實際的腐蝕環境更為復雜,對傳感器的應用也提出了更高的要求。例如,當電化學傳感器只是暴露在潮濕大氣中,而非降雨降雪等極端情況時,其表面很難形成連續的液膜,難以滿足電化學測量的條件,但該傳感器仍適用于離線取樣的氯離子測量。因為在實際應用時,飛機結構的焊縫、對接結構部位等處容易產生積水,當空氣中的氯離子沉降在其中,形成的電解質溶液可作為電化學的反應溶液,電化學傳感器可用于該場合的測量。對大氣中的氯離子濃度的監測有待進一步改進電化學傳感器的設計。
4 結語
文中提出了一種飛機腐蝕環境監測技術與基于該技術的小型化監測節點的實現方法。針對溫度、相對濕度、濕潤時間、氯離子濃度這4個影響腐蝕的環境參數,選型了溫濕度傳感器,研發了濕潤時間與電化學傳感器,并進一步實現了綜合各傳感器的多參數飛機腐蝕環境監測節點。該節點體積小,工作時被置于飛機結構表面,位于頂端的傳感器與結構感知相同的腐蝕環境,其輸出能較好地反映出被測環境的變化情況。最后通過實驗驗證了節點監測各參數功能的有效性。
節點監測各個環境參數是為了預估飛機結構的腐蝕情況,今后的工作除了進一步完善傳感器的設計以提高精度與穩定性之外,還需要理清環境參數與結構腐蝕之間的關系,建立數學模型,達到預測腐蝕的目的。
[1] 穆志韜,譚曉明,劉志國.海軍現役飛機的腐蝕損傷失效分析及腐蝕防護[J].裝備環境工程,2009,6(1): 43—48. MU Zhi-tao,TAN Xiao-ming,LIU Zhi-guo.Corrosion Damage Failure Law Analysis and Corrosion Control for Naval Aircraft in Servicing[J].Equipment Environmental Engineering,2009,6(1):43—48.
[2] 宋慧志.飛機腐蝕與防護[J].飛機設計,2006(1): 74—77. SONG Hui-zhi.Aircraft Corrosion and Protection[J].Aircraft Design,2006(1):74—77.
[3] 劉秀麗.飛機結構腐蝕檢測技術研究[J].機械強度, 2004(z1):60—62. LIU Xiu-li.Inspection Method of Corrosion on the Aircraft Structure[J].Journal of Mechanical Strength,2004(z1): 60—62.
[4] TIMOTHY F,DEVINDER M,IAIN H.ICAF 2009,Bridging the Gap between Theory and Operational Practice [M].Rotterdam:Springer Netherlands,2009.
[5] MENON S,LEWIS S,JIRACEK R.Method to Track Corrosion Environment in Aircraft[R].Report number: A160293,Minneapolis:Honeywell Laboratories,2001.
[6] COLE I S,CORRIGAN P A,GANTHER W,et al.Development of a Sensor-based Learning Approach to Prognostics in Intelligent Vehicle Health Monitoring[C]//Prognos-tics and Health Management,Denver:IEEE,2008:1—7.
[7] DEMO J,ANDREWS C,FRIEDERSDORF F,et al.Diagnostics and Prognostics for Aircraft Structures Using A Wireless Corrosion Monitoring Network[C]//Aerospace Conference 2011 IEEE.Big Sky:IEEE,2011:1—10.
[8] 蕭以德,張三平,曹獻龍,等.我國大氣腐蝕研究進展(續一)[J].裝備環境工程,2005,2(6):25—27. XIAO Yi-de,ZHANG San-ping,CAO Xiao-long,et al.Recent Development in Atmospheric Corrosion Study of Materials in China(Continued I)[J].Equipment Environmental Engineering,2005,2(6):25—27.
[9] 黃領才,谷岸,劉慧叢,等.海洋環境下服役飛機鋁合金零件腐蝕失效分析[J].北京航空航天大學學報, 2008,34(10):1217—1221. HUANG Ling-cai,GU An,LIU Hui-cong,et al.Corrosion Failure of Aluminum Alloy Parts on Airplane Used in Marine Environment[J].Journal of Beijing University of Aeronautics and Astronautics,2008,34(10):1217—1221.
[10]WILSON A R,MUSCAT R F,TRUEMAN T,et al.Philosophy,Fabrication,and Characterization of Thin Metal Foil Corrosion Sensors[C]//SPIE International Symposium on Smart Materials,Nano-and Micro-Smart Systems:Smart Structures,Devices and Systems II.Sydney:SPIE,2004: 393—401.
[11]REVIE R W.Corrosion and Corrosion Control[M].Hoboken New Jersey:John Wiley&Sons,2008.
[12]魏寶明.金屬腐蝕理論及應用[M].北京:化學工業出版社,1984. WEI Bao-ming.Metal Corrosion Theory and Application [M].Beijing:Chemical Industry Press,1984.
[13]WILSON A,MCMAHON P,MUSCAT R,et al.Thin Metal Foil Sensors[C]//SPIE International Symposium on Smart Materials,Nano-,and Micro-Smart Systems 2006: Smart Structures,Devices and Systems III.Adelaide: SPIE,2006.
[14]NIBLOCK T G E,SURANGALIKAR H S,MORSE J,et al.Development of a Commercial Micro Corrosion Monitoring System[C]//SPIE International Symposium on Smart Materials,Nano-,and Micro-Smart Systems.International Society for Optics and Photonics.Melbourne: SPIE,2002:179—189.
[15]唐其環.潤濕時間統計方法研究[J].環境技術.2003 (2):18—20. TANG Qi-huan.The Study of Statistical Methods for Time of Wetness[J].Environmental Technology,2003(2): 18—20.
[16]唐其環,張倫武.全國大氣潤濕時間分布分析軟件開發[J].裝備環境工程,2006,3(3):50—53. TANG Qi-huan,ZHANG Lun-wu.Development of Wetting Time Distribution Analysis Software in China[J].Equipment Environmental Engineering,2006,3(3):50—53.
[17]SEREDA P J,CROLL S G,SLADE H F.Measurement of the Time-of-Wetness by Moisture Sensors and Their Calibration [J].Atmospheric Corrosion of Metals,1982:267—285.
[18]TOMASHOV N D.Theory of Corrosion and Protection of Metals[M].New York:MacMillan, 1966.
A Multi-parameter Miniaturization Monitoring Node for Aircraft Corrosive Environments
CHANG Ming1,2,YUAN Shen-fang1,WANG Chang-chun1
(1.The State Key Lab of Mechanics and Control of Mechanical Structures, Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China; 2.School of Hydraulic,Energy and Power Engineering,Yangzhou University,Yangzhou 225000,China)
Objective To study the relationship between corrosion and environment,a realizing method of the multi-parameter miniaturization monitoring node for aircraft corrosive environments was proposed in this paper.Methods Four key environmental parameters which are the major factors affecting the corrosion were selected:temperature,humidity,time of wetness(TOW)and chloride ion concentration.And the corresponding sensors were chosen or designed for monitoring.Besides,this paper introduced a miniaturization monitoring node which could realize the measurements of multiple corrosive environmental parameters.The monitoring node was based on the Texas Instruments MSP430?micro-controller and included the aforementioned sensors.Results In the end,the verifications showed that the humidity and temperature sensor,the TOW sensor,and the electrochemical sensor were available;the measurements of four parameters could be performed correctly by the node.Conclusion Featuring a small volume and low weight,the node was applicable for on-aircraft corrosion monitoring.And this approach will provide actionable knowledge for aircraft maintainers,such that the aircraft safety could be driven to increased levels.
aircraft structure;monitoring of corrosive environments;multi-parameter;monitoring node
YUAN Shen-fang(1968—),Female,Ph.D.,Professor,Doctoral supervisor,Changjiang scholar,Research focus:structural health monitoring(SHM).
10.7643/issn.1672-9242.2014.06.003
TG174.3;TP302
:A
1672-9242(2014)06-0015-07
2014-08-12;
2014-09-03
Received:2014-08-12;Revised:2014-09-03
國家杰出青年基金(51225502);江蘇省優勢學科建設項目資助
Fund:Supported by National Science Fund for Distinguished Young Scholars(51225502)and Advanced Discipline Construction Foundation of Jiangsu Province of China
常鳴(1980—),女,江蘇南京人,博士研究生,講師,主要研究方向為腐蝕監測。
Biography:CHANG Ming(1980—),Female,from Nanjing,Jiangsu,Ph.D.Candidate,Lecturer,Research focus:corrosion monitoring.
袁慎芳(1968—),女,博士,教授,博士生導師,長江學者,主要研究方向為結構健康監測。
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年11期)2019-06-24 03:40:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04