空間碎片碰撞預警國際標準
2014-03-14 06:16:32李大衛陳凱劉靜中國科學院國家天文臺北京強度環境研究所
國際太空 2014年9期
關鍵詞:信息
李大衛 陳凱 劉靜( 中國科學院國家天文臺 北京強度環境研究所)
空間碎片碰撞預警國際標準
李大衛1陳凱2劉靜1(1 中國科學院國家天文臺 2 北京強度環境研究所)
目前,空間碎片受到多方面關注,空間碎片的碰撞預警與應用的研究從科研領域逐漸走向成熟的工程應用。伴隨碰撞預警工作工程化進程,需要加強整個碰撞預警流程的各個環節的規范性。國際上正積極制定空間碎片碰撞預警相關標準,了解這些標準對我國的碰撞預警標準化工作與國際合作有積極參考意義。本文調研了國際上兩個主要的空間碎片標準制定組織,介紹了這些組織的職能、組織結構、出版物等。此外,本文對碰撞預警相關國際標準進行了全面的解析,包括碰撞預警的流程、碰撞概率的基本計算等技術方法、影響規避決策的要素、交會數據信息等內容。
1 引言
隨著航天活動廣泛開展,空間環境保護受到越來越多方面的關注。2002年空間碎片協調委員會(IADC)發布了《空間碎片減緩指導方針》。2007年IADC對《空間碎片減緩指南(2002)》進行了補充修訂。2008年,美國通過聯合國和平利用外太空委員會(COPUOS),發布了另外一份《空間碎片減緩指導方針》。這兩份指導方針在內容保持了一致性,并為空間碎片國際標準奠定了基礎。然而,空間碎片碰撞規避方面的國際標準則相對欠缺。
航天數據系統咨詢委員會(CCSDS)于2013年6月發布了交會數據信息(CDM)標準,旨在規范交會數據的內容與格式,為數據供需雙方傳遞交會信息提供方便。國際標準組織(ISO)下屬的第20技術委員會(TC20)制定的《空間碎片碰撞規避》技術報告,包含了空間碎片碰撞預警的流程、碰撞概率的基本計算等技術方法、影響規避決策的要素等技術內容。
ISO及ISO國際標準制定過程
ISO是國際標準制定與發布組織,為行業生產、服務、實踐等提供先進的規范,促進行業高效運作。ISO成立于1947年,現已開發了超過19500份國際標準,幾乎涵蓋了技術與商業領域的各個方面。目前,ISO共有114個正式成員機構,45個通訊成員機構以及8個訂閱成員機構。我國以中國國家標準化管理局的名義參加ISO的工作。
ISO的標準由技術委員會(TC)的專家負責編寫,每個技術委員會負責一個相對獨立的方向。目前,ISO有超過250個技術委員會。其中,第20技術委員會(TC2O)代表航空航天技術委員會,其下屬的第14分技術委員會(SC14)負責航天系統及其應用。TC20/SC14包含7個工作組,這些工作組共同負責起草和制定與空間碎片有關的國際標準。其中空間碎片工作組同時負責空間碎片方面的協調工作。我國是第14分技術委員會的積極成員。
ISO國際標準的制定需要經過6個階段:第一階段是提案階段,提出新的工作項目提案;第二階段是準備階段,起草標準工作草案,形成初版委員會草案或公用規范;第三階段是委員會階段,制定委員會草案,形成國際標準草案或者技術規范;第四階段是征詢階段,制定國際標準草案,形成最終的國際標準;第五階段是批準階段,形成國際標準定版文檔;第六階段是發布階段,形成最終的國際標準。其中第一、二、四、六個階段是必要階段。
航天數據系統咨詢委員會介紹
航天數據系統咨詢委員會(CCSDS)成立于1982年,是由國際上主要航天機構組成的論壇,討論航天數據系統的開發與運營中的常見問題。目前,CCSDS有11個成員機構,28個觀察員機構,以及151個合作機構,中國國家航天局是CCSDS的成員機構之一。
CCSDS同時也是ISO TC20/SC13分技術委員會,負責制定空間數據與信息傳輸系統相關標準。CCSDS正式發布的標準,若被ISO接收,則直接成為委員會投票通過的國際標準草案(DIS)。
CCSDS發布的標準涉及6個領域,每個領域又細分成多個工作組:系統工程領域(SEA)、任務操作與信息管理業務(MOIMS)、橫向支持業務(CSS)、星載接口業務(SOIS)、空間鏈路業務(SLS)、空間網絡業務(SIS)。
國際空間碎片標準概況
ISO于2011年發布了ISO 24113《空間碎片減緩需求》。ISO 24113是頂層的空間碎片減緩標準,它包含了一系列切實有效的空間碎片減緩措施,并且易于通過商業合同、國家強制規范等方式來實現。ISO24113提出的減緩措施主要涉及以下幾個方面:避免航天器在正常工作過程中釋放空間碎片;任務結束后將航天器從GEO與LEO區域清除;避免航天器在軌解體事件;隕落風險評估。ISO還開發了一系列輔助標準,細化了ISO 24113標準。在ISO 24113及其附屬標準之外,ISO正在開發有關空間碎片的碰撞防護方面的一系列標準。
ISO 16158《在軌目標碰撞規避》技術報告,介紹了碰撞風險評估及規避的流程與主要技術方法。該標準已于2013年底發布。
CCSDS的《交會數據信息(CDM)》標準,介紹了空間碎片預警單位與衛星運營單位之間交會數據信息的內容標準與格式標準。CCSDS是在ISO 16158內容的基礎上建立的。目前該標準是CCSDS正式發布標準,同時也是ISO國際標準草案,即將進入國際征詢階段。
2 碰撞預警國際標準
目前公開的ISO/CD 16158技術報告,介紹了碰撞規避工作的工作流程、數據需求、碰撞預警以及規避等方面內容。

碰撞預警的頂層流程
碰撞預警與規避計算的工作流程
整個工作流程的輸入為交會分析綜合信息,包括軌道根數信息、軌道質量信息、衛星屬性信息等。綜合數據由衛星運營單位、觀測單位提供或通過互聯網獲取。其余可選擇的輸入信息還包括:衛星的尺寸、質量、幾何形狀、和工作狀態等。碰撞概率計算主要的步驟包括:輸入數據、初始篩選、近距離交會篩選、碰撞概率計算與生存概率計算。碰撞預警與規避的頂層工作流程圖。
危險交會篩選方法
1)輸入軌道數據與數據篩選:交會計算的輸入數據包括軌道信息與軌道的不確定性信息。在軌道預報中,隨著預報期增加,預報精度下降。不建議使用預報期超過7天的軌道根數做交會計算,因此,在交會計算前,需要排除掉預報期超過7天的軌道根數。
2)初始篩選:去掉兩顆衛星之間重復的交會計算;排除不可能發生的交會,如兩顆同步衛星的經度相差180°。
為了進一步排除不會發生的交會的衛星,減少計算總量,還采用以下幾種篩選算法:直接篩選法、環形篩選法、體篩選。
碰撞風險評估與規避
初始篩選的結果不足以給出碰撞風險,下文介紹用于判斷衛星是否遭遇高碰撞風險的方法。首先要判斷兩顆衛星是否真的足夠接近,即判斷這次交會是否是近距離交會,考慮因素有衛星尺寸、碰撞后果、定軌與預報精度等。
(1)衛星的危險區域
衛星的危險區域指圍繞在衛星周圍的區域。這個區域的形狀由衛星運控方提供,該區域的形狀與衛星的尺寸、碰撞后果、軌道確定和預報的誤差等因素有關。危險區域的形狀通常可以分成對稱區域、非對稱區域兩類。
(2)碰撞概率計算
碰撞概率是交會的兩顆衛星發生碰撞的概率密度函數在衛星尺寸上的積分。因此,計算碰撞概率的要素包括:交會距離、目標尺寸、協方差矩陣。
衛星軌道誤差包含系統誤差與測量誤差,軌道誤差由3×3協方差位置矩陣來表征。當相對速度較大時,可以將交會的相對運動近似為直線運動;若交會速率遠小于相對速度,那么交會的路徑為曲線,如地球靜止軌道衛星的交會就是這種情況。
計算協方差橢球到交會平面的投影前,先將協方差橢球歸算到對稱的球形空間中,再投影到二維平面上,代入碰撞概率計算公式。
(3)最大概率計算
碰撞概率的計算要素包括:衛星的外部結構、姿態、瞬時軌道、軌道協方差等。以上信息通常是不完整。此外,統計定軌所采用的模型、樣本量、采樣頻率等可能不完全匹配,使得協方差矩陣計算不準。上述因素都會影響碰撞概率計算結果的準確性。為了降低此類影響,在碰撞概率信息不完整時,建議采用最大概率替代碰撞概率。
(4)概率中的危險區域分析
另外一種解決碰撞概率計算要素不足的方法是分析危險區域,即詳細地研究危險區域尺寸與形狀,使危險區域能夠包含盡可能多的大概率交會事件。選擇大且保守的危險區域,計算得到的大碰撞概率事件多,虛警率也高。選擇小的危險區域,虛警低,大碰撞概率事件少。通常情況下,建議采用保守的危險區域,以免漏警。
1)生存概率計算。碰撞規避的目標是保證衛星在指定時間段內安全。衛星在指定時間段內安全的概率就是生存概率。生存概率可以用來輔助規避決策,包含:危險交會變化趨勢、累計碰撞概率和貝葉斯估計。
·危險交會變化趨勢。危險交會的變化趨勢是指兩顆衛星在指定時間內主要交會參數的變化情況。最近距離降低,碰撞概率增大,是危險交會的特點。但如果在整個交會預報過程中,只有一次小距離大概率交會結果,這一次危險交會預報的可信度相對較低,所預報的交會很可能不會發生。
·累計碰撞概率。累計碰撞概率是指一個衛星在指定時間段內所受到的碰撞威脅總和,用來分析一個衛星的生存概率。在一段時間內,衛星可能受到多次碰撞威脅,即使單次危險交會沒有超過閾值,但累計多次交會很可能超過閾值。
·貝葉斯估計。貝葉斯估計利用條件概率的基本原理,能夠系統地評估多因素事件的概率。碰撞事件也是一個多因素事件,其主要影響因素包括交會距離、指定時間段內的最大概率、軌道誤差等,附屬因素包括:衛星是否有機動能力、碰撞后果、剩余燃料等。貝葉斯估計碰撞概率模型能夠解釋如下的現象:部分衛星經常發生近距離交會,但不會發生碰撞。貝葉斯估計中,影響因素與發生碰撞的概率之間的關系可以通過經驗模型與統計結合的方法來確定。盡管貝葉斯估計算法能夠評估出多因素條件下的碰撞風險,但缺點是物理含義不明,不能明確揭示碰撞風險原因,也不能給出風險減緩的指導意見。
2)規避的影響因素。影響規避決策的要素還包括:機動能力、航天器特征、軌道數據質量、碰撞后果評估等。
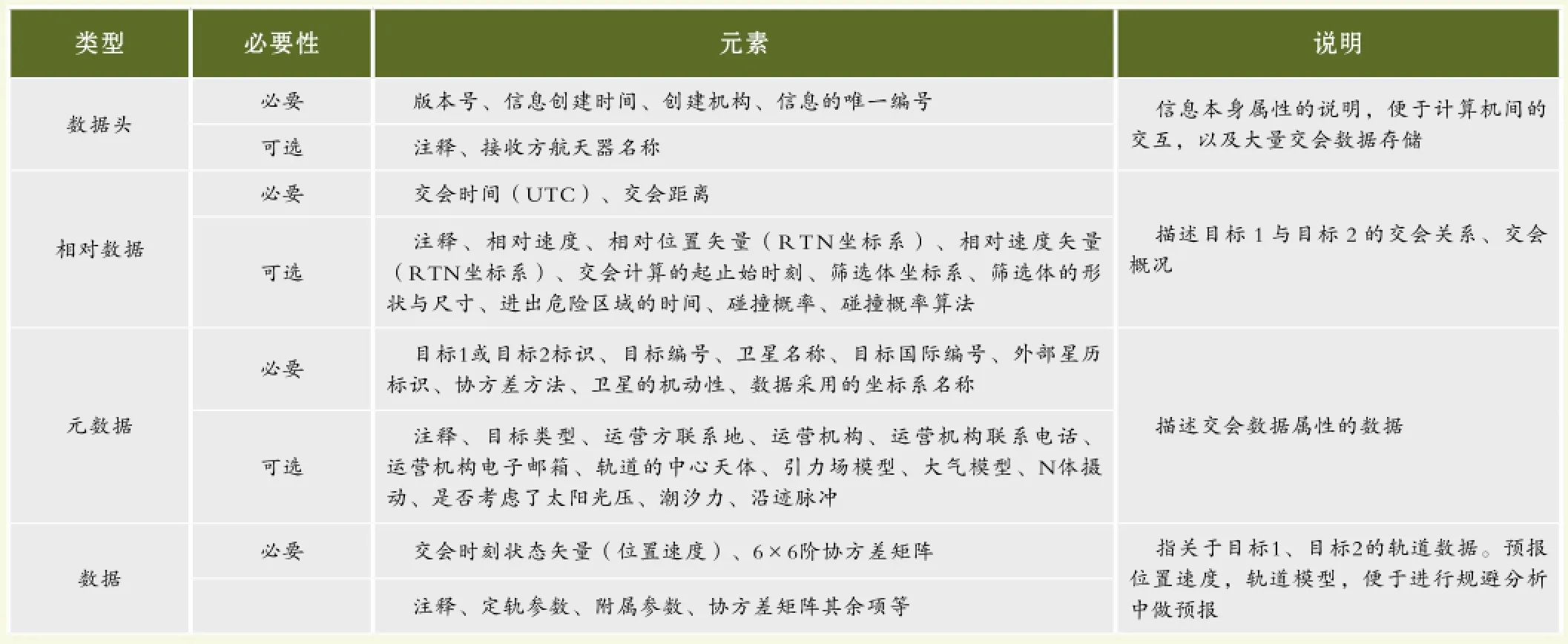
CDS數據要素表
·軌道數據質量。不同軌道數據的數據質量是不同的,即使用相同來源的數據,也會因觀測設備誤差、觀測頻率不同,而造成數據質量的差異。因此,提供軌道數據的同時需要提供相應的數據質量信息。
·碰撞后果評估。碰撞規避后果評估包括兩個方面,一是評估碰撞發生以后,空間碎片的增量;二是評估碰撞規避對空間交通的影響。
·機動能力。盡管機動能力本身不是決定性因素,但交會雙方是否能夠機動是非常關鍵的信息。機動消耗了推進能量,而這些能量原本用于軌道保持、姿態調整、任務結束后的棄置等任務。因此,規避機動前,需要考慮規避是否會影響衛星的上述任務。
·航天器特征。航天器的尺寸、幾何形狀、姿態調整能力都是要考慮的。大型航天器通常配置大型太陽帆板,這類航天器的橫截面上有很多間隙。計算碰撞概率時,這些間隙的面積也應包含到航天器的橫截面積中。
3 國外交會數據標準
1)目前已在ISO 16158的基礎上,編寫了交會數據推薦標準《交會數據信息(CDM)》。該推薦標準的目的是:方便交會事件的操作,確保預警發起者與衛星所有者/運營者雙方的交會結果一致;促進碰撞交會自動化計算;提供關鍵交會信息,確保及時做出交會評估風險以及碰撞規避決策。
該推薦標準用于規范與促進衛星交會評估的發起者與接收者之間的交會數據交換,適用于衛星在任何工作環境中所遭遇的近距離交會以及碰撞。交會信息包含最近距離、碰撞概率,交會時間、最近相對位置與相對速度等信息。
2)交會數據信息內容。CCSDS的《交會數據信息》標準規定每個CDM文件包含兩個空間目標的一次交會事件。CDM文件中包含數據頭、相對元數據/數據、元數據、數據、注釋信息幾個部分。上述信息又分為必要信息與可選信息。
3)交會數據信息格式。交會數據信息可以用純本文或者XML編碼,這兩種編碼可以互相轉換。XML是可擴展標記語言,具有良好的可擴展性,內容與形式的分離,遵循嚴格的語法要求,便于不同系統之間信息的傳輸,使用周期長。
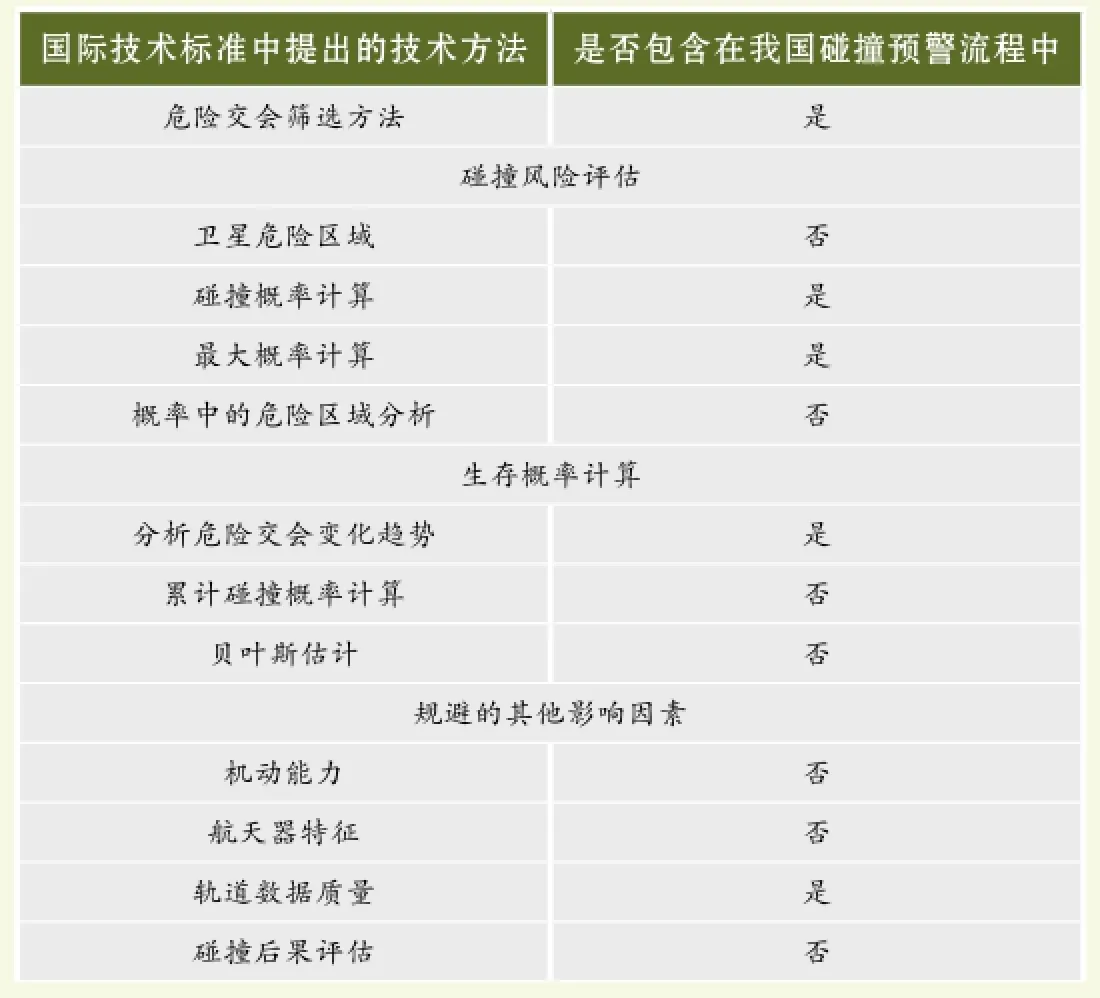
國內外碰撞預警與規避技術標準對比
4 與國際碰撞預警技術標準與數據標準對比
(1)碰撞預警技術對比
通過對比可見,在衛星危險區域分析、碰撞規避與碰撞后果評估方面,我國的碰撞預警流程仍能做進一步細化完善。
(2)交會數據對比
CDM標準與我國目前的碰撞預警結果在內容上的區別有四點:
·目標危險區域表示方法。CDM定義了多種危險區域的形狀。通常我們將碎片的危險區域設為目標的大概尺寸,默認為危險區域為球形。
·體現多種碰撞概率算法。目前國際上存在多種碰撞概率計算方法,CDM能夠明確體現出不同的碰撞概率計算方法。CCSDS下屬的網站上,注冊了14種碰撞概率計算算法。國內通常選用歷史統計誤差來定義誤差橢球,采用單一的碰撞概率計算方法,不在碰撞預警結果中特別說明。
·衛星屬性信息。CDM中列出的衛星屬性信息,如衛星是否能夠機動等。衛星的機動能力是規避決策的重要影響因素之一。此類衛星屬性信息目前尚未納入到我國的碰撞預警結果中。
·定軌參數與附屬參數。在交會結果中明確寫出定軌參數與附屬參數,既有助于避免因軌道根數類型不同而造成的交會結果不同,還便于在后續的規避分析中選擇正確的預報模型。CDM中的協方差數據,還能夠反映出碰撞預警結果的可信度。碰撞預警報告中通常不包含這一類信息。
5 小結
為了促進我國碰撞預警的標準化與國際合作,以下方面的工作需加以完善:
1)碰撞預警流程的國際標準中包括了碰撞規避分析,CCSDS提出的數據標準中,也列出了輔助規避決策所需要的數據。目前,國內的碰撞預警通常以危險交會報告作為預警的結束,碰撞預警與規避決策是兩個相對獨立的工作。碰撞預警與規避決策分析的主要輸入都包含了軌道根數等信息,在數據與計算方面存在重復,將兩者統一起來,有助于完善碰撞預警結果,同時,也助于避免因數據不一致造成的分歧和重復計算。
2)加強碰撞后果的分析,如碰撞解體事件發生后,二次解體、多次解體事件對空間環境的影響。
3)危險交會信息的方面,國內外數據主要內容基本一致。CDM能夠更好的兼容計算機之間的交互、多種碰撞概率的計算方法。我國的交會報告通常關注交會計算輸出的結果,如交會時間、交會距離、碰撞概率等,省略危險交會的輸入數據信息。這類輸入數據(如軌道根數、定軌相關參數、協方差、機動能力等)能夠幫助交會信息接收一方掌握交會結果的可靠性,同時,便于交會信息的接收方做進一步分析。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
