基于GMM和神經(jīng)網(wǎng)絡(luò)的輻射源識別方法
2014-03-15 02:53:45
雷達(dá)科學(xué)與技術(shù) 2014年5期
關(guān)鍵詞:分類
(空軍裝備研究院雷達(dá)所,北京100085)
0 引言
自上世紀(jì)70年代以來,雷達(dá)技術(shù)有了迅速發(fā)展并廣泛應(yīng)用于軍事領(lǐng)域,出現(xiàn)地基、空基、海基、天基系列裝備,隨之產(chǎn)生了雷達(dá)電子戰(zhàn)。特別是上世紀(jì)90年代以來,多次局部戰(zhàn)爭事實證明,雷達(dá)電子戰(zhàn)扮演著越來越重要的角色。
對于電子戰(zhàn)裝備中的雷達(dá)偵察設(shè)備而言,系統(tǒng)主要功能就是從截獲接收到的密集雷達(dá)脈沖流中分選出屬于各個雷達(dá)輻射源的脈沖,然后對脈沖信號參數(shù)進(jìn)行測量、分析和識別,并對威脅雷達(dá)輻射源進(jìn)行壓制式干擾或者構(gòu)造虛假回波信號進(jìn)行各種欺騙式干擾,或者利用反輻射導(dǎo)彈直接對其進(jìn)行摧毀[1]。
雷達(dá)電子支援措施(ESM)的主要任務(wù)是根據(jù)截獲的脈沖流進(jìn)行輻射源類型的實時分類識別[2-3]。傳統(tǒng)方法是將已知雷達(dá)脈沖流分選為脈沖串,將脈沖串的特征在先驗特征數(shù)據(jù)庫中進(jìn)行搜索比對,匹配輸出相近的雷達(dá)輻射源類型。然而,當(dāng)面臨電磁環(huán)境密度增大、脈沖重疊及載頻捷變等復(fù)雜環(huán)境時,該類算法的實時性和準(zhǔn)確性難以滿足作戰(zhàn)需求,因此,急需開展針對雷達(dá)輻射源類型分類識別的新型算法研究。
本文通過建立GMM構(gòu)建了一個輸入為截獲雷達(dá)脈沖特征參數(shù),輸出為輻射源類型的分類器。其中,模型參數(shù)采用EM算法進(jìn)行先驗訓(xùn)練,相比傳統(tǒng)方法可降低在線識別時間、提升識別準(zhǔn)確率。為實現(xiàn)分類性能對比,進(jìn)一步提出基于神經(jīng)網(wǎng)絡(luò)中Fuzzy Artmap算法構(gòu)建的輻射源類型分類器。通過仿真分析,所提出的兩種分類器均能實現(xiàn)對雷達(dá)輻射源的在線識別,當(dāng)用于訓(xùn)練的樣本比例不低于10%時,均能獲得90%以上的分類正確率。相比于神經(jīng)網(wǎng)絡(luò),基于GMM的分類器在雷達(dá)輻射源數(shù)量不大于12類時,具有較優(yōu)性能。
1 問題分析與定義
1.1 脈沖特征參數(shù)選取
針對截獲雷達(dá)脈沖的特征刻畫,通常采用脈沖幅度(PA)、脈沖寬度(PW)、載波頻率(CF)、脈沖重復(fù)間隔(PRI)等。一旦測定上述參數(shù),就組成脈沖描述字(PDW)的數(shù)據(jù)結(jié)構(gòu)[4]。由于受傳輸路徑損耗等影響,脈沖幅度信息存在很大起伏,基本不可靠,因此本文選用脈沖寬度、載波頻率、脈沖重復(fù)間隔三個參數(shù)構(gòu)成脈沖描述字,用以刻畫雷達(dá)輻射源的基本特征。
1.2 基于脈沖的雷達(dá)輻射源類型識別
在實際戰(zhàn)場環(huán)境中,會出現(xiàn)雷達(dá)工作模式多變、偵察對象具有低截獲性能、偵察設(shè)備反應(yīng)時間短等情況。其中,雷達(dá)工作模式的變化主要是由計算機控制載波頻率、脈沖重復(fù)間隔等參數(shù)的變化來實現(xiàn)。對于ESM系統(tǒng),這將使數(shù)據(jù)庫的構(gòu)建更加龐大和復(fù)雜,參數(shù)捷變也會增加雷達(dá)脈沖分選的困難。同時,偵察設(shè)備反應(yīng)時間短要求脈沖分選的速度要快,也就意味著ESM系統(tǒng)要用比較少的脈沖信息來對雷達(dá)輻射源類型進(jìn)行識別分類。
針對以上情況,我們假定每個雷達(dá)輻射源的出現(xiàn)存在隨機性,根據(jù)統(tǒng)計假設(shè)理論,為每個輻射源建立一個概率模型[5],采用GMM算法構(gòu)建一個新的分類器,具備輸入是截獲脈沖描述字,輸出為輻射源類型的分類功能。通過對已知先驗數(shù)據(jù)的學(xué)習(xí),可以實現(xiàn)不需基于數(shù)據(jù)庫搜索比對,而是直接利用經(jīng)訓(xùn)練的模型參數(shù)進(jìn)行在線的類型分類。
同時,由于神經(jīng)網(wǎng)絡(luò)具有自適應(yīng)、自組織、自學(xué)習(xí)能力,可以有效處理環(huán)境信息復(fù)雜、背景知識模糊的問題,它通過對樣本的學(xué)習(xí)建立起“記憶”,然后將未知模式判為其最為接近的記憶[6]。因此,我們還利用Fuzzy Artmap算法構(gòu)建了一個分類器,通過對部分已知雷達(dá)類型數(shù)據(jù)的學(xué)習(xí),就可以直接對脈沖描述字串/流進(jìn)行在線分類識別。
2 雷達(dá)輻射源識別算法
2.1 基于GMM算法的雷達(dá)脈沖識別
2.1.1 GMM算法
GMM是由多個多維高斯分布構(gòu)成[7],如圖1所示,它可以表示為

式中,x n表示第n個輻射源的PDW矢量;p i(x n)表示三維高斯分布聯(lián)合概率密度函數(shù);αi表示對應(yīng)的權(quán)重系數(shù);M表示GM M階數(shù),用來刻畫能夠識別的雷達(dá)輻射源個數(shù)上界。其中,p i(x n)和αi必須滿足
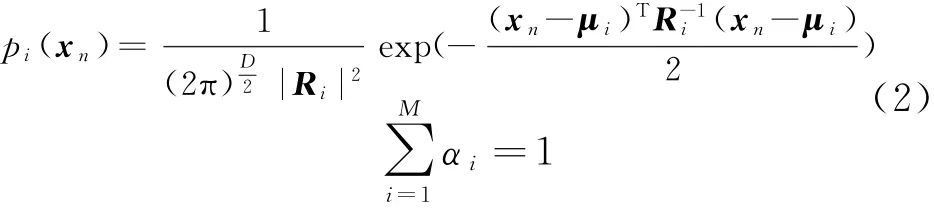
式中,μi和R i分別表示第i個分量的均值矢量和協(xié)方差矩陣。因此,GMM的核心參數(shù)可以用λ={αi,μi,R i(i=1,2,…,M)}來表征,則其聯(lián)合概率密度函數(shù)可表示為

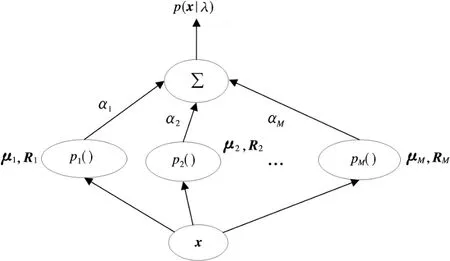
圖1 GMM的拓?fù)潢P(guān)系圖
為了得到GMM的最優(yōu)參數(shù),需要進(jìn)行最大似然估計,因此,我們可采用EM算法[8]基于部分觀測數(shù)據(jù)對其進(jìn)行訓(xùn)練學(xué)習(xí)。通過不斷地迭代估計步驟(E步)和最大化步驟(M步),在達(dá)到最大迭代次數(shù)后或者檢測到參數(shù)收斂后停止迭代,返回模型的最優(yōu)參數(shù)集λ。
2.1.2 算法步驟
整個算法分為兩步進(jìn)行,分別是訓(xùn)練過程和識別過程,具體步驟如下:
(1)訓(xùn)練過程
① 提取用于訓(xùn)練的雷達(dá)脈沖序列參數(shù)及對應(yīng)輻射源類型標(biāo)簽;
② 構(gòu)建PDW序列并歸一化;
③利用EM算法對GMM進(jìn)行參數(shù)訓(xùn)練學(xué)習(xí),獲得最優(yōu)參數(shù)集λ。
訓(xùn)練過程的流程如圖2所示。
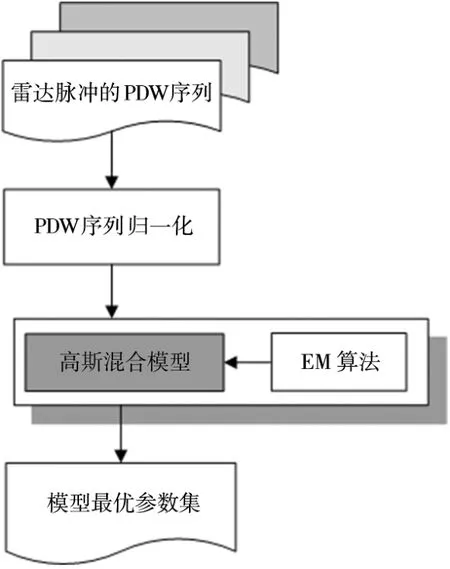
圖2 訓(xùn)練過程流程圖
(2)識別過程
① 輸入截獲雷達(dá)脈沖串的PDW序列;
② 對PDW序列進(jìn)行歸一化;
③計算輸入PDW隸屬于所有可能雷達(dá)輻射源的似然概率;
④ 進(jìn)行隸屬度檢測,如果pmax≥γ,其中γ為門限閾值,則GM M中對應(yīng)該似然概率的節(jié)點K即為雷達(dá)輻射源類型的預(yù)測標(biāo)簽。
識別過程的流程如圖3所示。
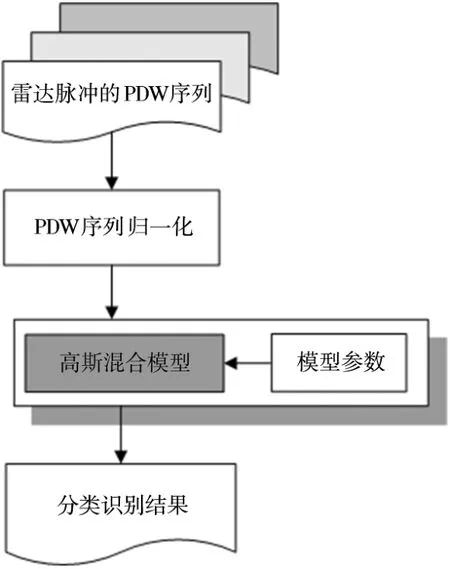
圖3 識別過程流程圖
2.2 基于Fuzzy Artmap算法的雷達(dá)脈沖識別
2.2.1 Fuzzy Artmap算法
Fuzzy Artmap算法是一種具有快速、穩(wěn)定、在線運算、有人監(jiān)督學(xué)習(xí)、分類和預(yù)測性質(zhì)的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),它是通過把ART無人監(jiān)督神經(jīng)網(wǎng)絡(luò)與映射域相結(jié)合而得到[9-10]。Fuzzy Artmap可以同時處理模擬的和二元數(shù)字描述的輸入模式,在應(yīng)用中通常使用的結(jié)構(gòu)如圖4所示。
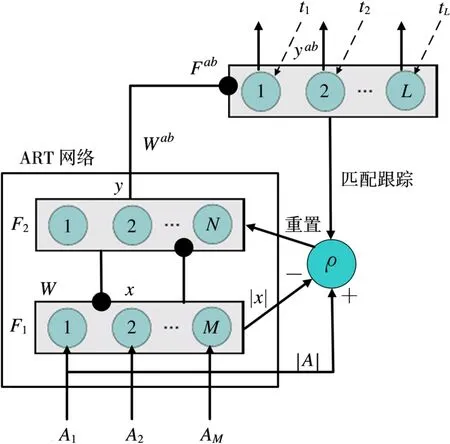
圖4 Fuzzy Artmap結(jié)構(gòu)圖
Fuzzy Artmap神經(jīng)網(wǎng)絡(luò)的輸入是歸一化的PDW,整個網(wǎng)絡(luò)包括兩個相連的節(jié)點層:一個M節(jié)點的輸入層F1和一個N節(jié)點的競爭層F2。在F1到F2層連接處實際上是一個實值權(quán)重集W={w ij∈[0,1],i=1,…,M;j=1,…,N}。在F2到F ab連接中關(guān)聯(lián)了一個二值權(quán)重集W ab={w abjk∈ {0,1}:j=1,…,N;k=1,…,L}。
2.2.2 算法流程
(1)初始化:對權(quán)重集和網(wǎng)絡(luò)中參數(shù)進(jìn)行賦初值。
(2)輸入模式編碼:對A進(jìn)行補碼運算,定義為

式中,a ci=(1-a i)。

(3)原型選擇:模式A激活F1層,并通過加權(quán)連接w傳播到F2層。F2中每個結(jié)點的激活選擇函數(shù)定義為式中,|·|為規(guī)范化算子;∧ 為模糊與運算符,(A∧w j)i=min(A i,w ij)。僅具有最大T j的節(jié)點勝出并激活,計算該節(jié)點的匹配值Q,Q的定義為

將Q與警戒參數(shù)ρ比較,如果Q大于ρ,保持該節(jié)點激活,共振現(xiàn)象發(fā)生,否則抑制激活,搜索其他節(jié)點。
(4)分類預(yù)測:模式t是直接反饋回映射域的,而F2的分類y則需要通過W ab激活映射域。F ab層生成一個二值激活模式y(tǒng) ab=(y a1b,y a2b,…,y aLb)。激活程度最高的F ab結(jié)點K反映了分類預(yù)測K=k(J)。
(5)學(xué)習(xí):更新F2節(jié)點的原型向量,計算公式為

式中,β為一個確定的學(xué)習(xí)率參數(shù)。
3 仿真與分析
3.1 仿真數(shù)據(jù)
根據(jù)實際雷達(dá)發(fā)射機參數(shù)設(shè)置,假設(shè)截獲雷達(dá)脈沖數(shù)據(jù)的特征參數(shù)滿足脈沖寬度為0.1~10 μs,脈沖重復(fù)間隔為1~10 k Hz,載波頻率為1~2 GHz,隨機產(chǎn)生不同類型雷達(dá)輻射源的脈沖描述字仿真數(shù)據(jù),部分采樣數(shù)據(jù)如圖5所示。

圖5 部分雷達(dá)脈沖特征參數(shù)采樣
3.2 仿真結(jié)果
基于仿真數(shù)據(jù),將其中10%作為分類器的訓(xùn)練數(shù)據(jù)使用,其他90%的數(shù)據(jù)作為測試數(shù)據(jù)使用,用來驗證分類器的分類識別性能。利用蒙特卡洛仿真進(jìn)行500次獨立試驗,在不同輻射源類型數(shù)量的情況下,基于GMM和Fuzzy Artmap算法所構(gòu)建分類器的分類正確率如圖6所示。從圖中可以看出,當(dāng)輻射源類型小于12類時,GMM算法的識別正確率優(yōu)于Fuzzy Artmap算法,當(dāng)輻射源類型大于12時,結(jié)果正好相反,這是由于GM M算法的收斂約束條件在多類型輻射源識別中較難滿足所致。
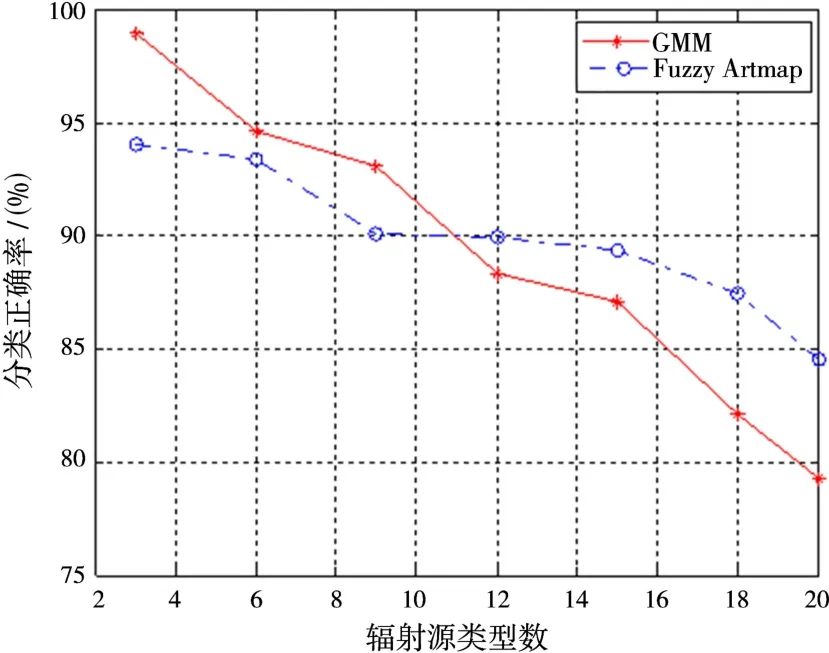
圖6 分類識別正確率隨雷達(dá)輻射源種類的變化
當(dāng)雷達(dá)輻射源種類為6類時,GMM算法和Fuzzy Artmap算法在不同訓(xùn)練數(shù)據(jù)樣本比例下的分類識別正確率如表1所示。從表中可以看出,當(dāng)訓(xùn)練數(shù)據(jù)增多時,兩種算法的識別正確率均有提高,這說明對于在線分類識別算法,通過增加學(xué)習(xí)樣本庫的數(shù)量可以提高算法的識別性能,能有效避免傳統(tǒng)算法下構(gòu)建和維護大數(shù)據(jù)量、復(fù)雜數(shù)據(jù)庫的成本和時間。
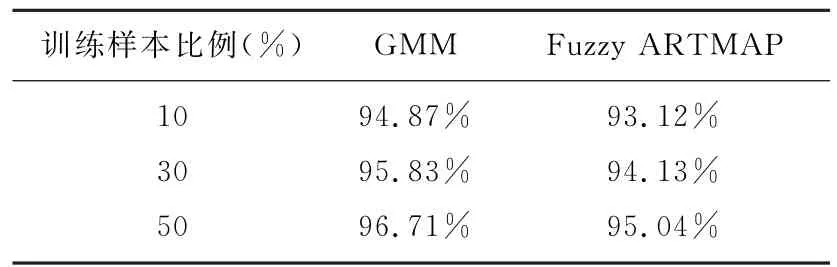
表1 不同訓(xùn)練數(shù)據(jù)樣本比例下的分類識別正確率
在圖7中,基于GMM和Fuzzy Artmap算法的兩種分類器均隨著偵察接收信噪比(SNR)的增大而不斷提高,SNR的高低直接影響雷達(dá)脈沖流/串所提特征的完整性,即PDW的完整性。在SNR較低的場景中,由于GMM算法具有比Fuzzy Artmap算法更優(yōu)的穩(wěn)健性,因此其對應(yīng)的識別性能較優(yōu);當(dāng)SNR較高時,二者均能達(dá)到較優(yōu)的識別正確率。
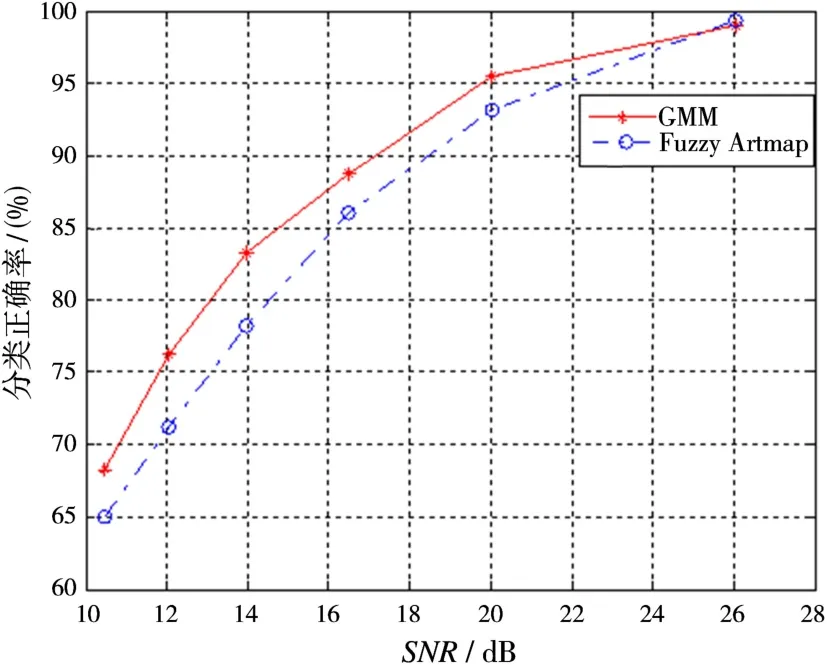
圖7 不同SNR下的分類識別正確率
4 結(jié)束語
本文利用GMM和Fuzzy Artmap兩種算法分別構(gòu)建了雷達(dá)輻射源分類器,二者均能實現(xiàn)基于截獲脈沖參數(shù)的在線識別,能夠避免大容量數(shù)據(jù)庫的構(gòu)建并降低基于搜索比對方式的匹配時間,提高分類識別的效率。通過仿真對比,在雷達(dá)輻射源類型較少(小于12類)、低SNR的場景下,基于GMM算法的分類器具有較優(yōu)的分類識別性能;當(dāng)雷達(dá)輻射源類型較多(大于12類)時,基于Fuzzy Artmap算法的分類器具有較優(yōu)的分類識別性能。
[1]趙國慶.雷達(dá)對抗原理[M].西安:西安電子科技大學(xué)出版社,1999:56-78.
[2]趙貴喜,王巖,于冰,等.基于人工魚群聚類的雷達(dá)信號分選算法[J].雷達(dá)科學(xué)與技術(shù),2013,11(4):375-378.ZHAO Gui-xi,WANG Yan,YU Bing,et al.Radar Signal Sorting Algorithm Based on Artificial Fish Swarm Clustering[J].Radar Science and Technology,2013,11(4):375-378.(in Chinese)
[3]管振輝.一種ESM系統(tǒng)信號處理的設(shè)計方法[J].艦船電子對抗,2013,36(2):47-51.
[4]王雪松,肖順平,馮德軍.現(xiàn)代雷達(dá)電子戰(zhàn)系統(tǒng)建模與仿真[M].北京:電子工業(yè)出版社,2010:125-130.
[5]RADU M,RINA D.AND/OR Branch-and-Bound Search for Combinatorial Optimization in Graphical Models[J].Artificial Intelligence,2009,173(16):1457-1491.
[6]閻平凡,張長水.人工神經(jīng)網(wǎng)絡(luò)與模擬進(jìn)化計算[M].北京:清華大學(xué)出版社,2000:185-192.
[7]趙悅.概率圖模型學(xué)習(xí)理論及其應(yīng)用[M].北京:清華大學(xué)出版社,2012:172-186.
[8]余瑞艷.基于期望最大算法的高斯混合模型參數(shù)估計[J].長江大學(xué)學(xué)報(自然科學(xué)版),2012,9(11):12-17.
[9]MAIZURA M,JOE H.Comparing the Online Learning Capabilities of Gaussian ARTMAP and Fuzzy ARTMAP for Building Energy Management Systems[J].Expert Systems with Applications,2013,40(15):6007-6018.
[10]EMINA A,ABDULHAMIT S.Usage of Simplified Fuzzy ARTMAP for Improvement of Classification Performances[J].Southeast Europe Journal of Soft Computing,2013,2(2):93-97.
猜你喜歡
西北民族大學(xué)學(xué)報(自然科學(xué)版)(2021年4期)2021-12-29 02:54:24
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
小聰仔(科普版)(2020年12期)2021-01-18 09:16:52
東方少年·布老虎畫刊(2020年4期)2020-06-08 15:48:10
學(xué)生天地(2019年32期)2019-08-25 08:55:22
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
小天使·一年級語數(shù)英綜合(2017年11期)2017-12-05 18:49:56
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
