3-RPS和3-SPR機構鉸鏈布置形式建模與分析
2014-03-26 05:44:42熊令明
武漢科技大學學報 2014年1期
熊令明,張 臣
(南京航空航天大學機電學院, 江蘇 南京, 210016)
根據各構件間相對運動方式的不同,并聯機構可分為平面并聯機構、球面并聯機構和一般空間并聯機構[1]。并聯機構的形式有多樣[2],雖然其結構形式、自由度數目及驅動方式等各不相同, 但相互間具有緊密的內在聯系[3]。作為空間三自由度并聯機構的代表3-RPS和3-SPR并聯機構,其運動副的布置常常被忽略。并聯機構鉸鏈和布置形式的不同會對機構的運動方式產生重要影響,因此研究并聯機構鉸鏈的不同布置形式有重要意義[4]。
本文根據并聯機構結構綜合理論以及單開鏈為單元的并聯機構組成原理[5],建立3-RPS和3-SPR機構鉸鏈布置形式的模型,借助ADAMS軟件分析所建相同平臺和不同平臺下鉸鏈布置形式模型的可靠性,給出各種鉸鏈布置形式產生的運動結果,與所建立的布置形式模型進行比較,篩選出符合體感機構要求的三自由度并聯機構。
1 機構建模與運動學分析
1.1 鉸鏈布置形式的數學建模
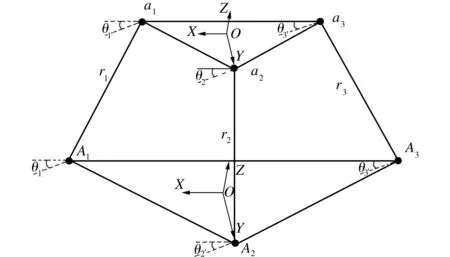
圖1 3-SPR和3-RPS機構數學模型示意圖Fig.1 Schematic diagram of 3-SPR and 3-RPS mechanism model
1.2 機構位移分析
定平臺的端點鉸鏈在定坐標系中的坐標為
(1)
動平臺的鉸鏈在動坐標系中的坐標為
(2)
動平臺的坐標原點在定坐標系中的坐標為
動平臺的鉸鏈在定坐標系中的坐標為
動平臺到定平臺的旋轉矩陣為
并滿足以下條件:
zl=ynxm-xnymxlyl+xmym+xnyn=1
zm=ylxn-xlynxlzl+xmzm+xnzn=1
zn=ymxl-xmymzlyl+zmym+znyn=1
即動平臺在定平臺上旋轉后的端點坐標表示式為
(3)
式中:a=qrxl-ryl+2Xo;b=qrxm-rym+2Yo;c=qrxn-ryn+2Zo;d=-qrxl-ryl+2Xo;e=-qrxm-rym+2Yo;f=-qrxn-ryn+2Zo。
桿長為
ri=ai-Ai
即
則桿長表達式為
(4)
式中:G=XOxl+YOxm+ZOxn;K=XOyl+YOym+ZOyn。
動平臺的最終位姿可以由(Xo,Yo,Zo,α,β,γ)來表示,其中α,β,γ為動平臺繞空間上互為垂直的3根軸線旋轉的角度,即歐拉角。歐拉角與旋轉矩陣為一一對應的關系。由于符合條件的機構驅動桿中均含有1個旋轉副,且由3根非線性驅動桿驅動,所以每條驅動桿都有1個約束方程,即該驅動桿的向量一直與該桿中的旋轉副軸線垂直。桿長表達式中含有6個未知數,依據約束數與自由度數的關系,該機構可以建立3個約束方程。
δi·Ri=0(i=1,2,3)
(5)

當a1鉸鏈為旋轉鉸鏈時,約束式為
2G+qr-qRxl+Rxmcosθ1+
2K-r-qRyl+Rymsinθ1=0
(6)
當A1鉸鏈為旋轉鉸鏈時,約束式為
qrxl-ryl+2XO-qRcosθ1+
qrxm-rym+2YO+Rsinθ1=0
(7)
當a2鉸鏈為旋轉鉸鏈時,約束式為
G-Rxmcosθ2+(K-Rym)sinθ2=0
(8)
當A2鉸鏈為旋轉鉸鏈時,約束式為
ryl+XOcosθ2+
(rym+YO-R)sinθ2=0
(9)
當a3鉸鏈為旋轉鉸鏈時,約束式為
2G-qr+qRxl+Rxmcosθ3+
2K-r+qRyl+Rymsinθ3=0
(10)
當A3鉸鏈為旋轉鉸鏈時,約束式為
-qrxl-ryl+2XO+qRcosθ3-
qrxm+rym-2YO-Rsinθ3=0
(11)
根據機構動定平臺各鉸鏈支點是否為旋轉鉸鏈,選擇對應的約束方程。因所選機構為3-SPR、3-RPS,故存在3個約束方程。為獲得3-SPR、3-RPS機構的位姿(含6個未知量),需要選擇3個位姿獨立變量進行求解。利用Matlab進行計算篩選,步驟如下:
(1)根據機構類型選擇對應約束方程,如:3-SPR機構中的旋轉鉸鏈均在動平臺,故選擇式(6)、式(8)、式(10)作為3-SPR的3個約束方程。
(2)將機構的旋轉鉸鏈軸心線角度 代入方程并簡化,如:將3-SPR機構中θ1、θ2、θ3為90°、0°、90°分別代入式(6)、式(8)、式(10),化簡后即得:
(12)
式中:G=XOxl+YOxm+ZOxn;K=XOyl+YOym+ZOyn。
(3)對化簡后的約束方程進行旋轉方式選擇,從中選出最易求解的一組,如: 式(12)化簡后的約束方程選擇XYX形式的歐拉角最為簡便,根據已知的3個獨立變量,利用Matlab軟件計算得出(Xo,Yo,Zo,α,β,γ)中的另外3個變量。
(4)利用求出的3個機構變量和已知的3個獨立變量,結合式(4)計算驅動桿長度,即可求出桿的伸長量。
1.3 鉸鏈布置形式分析
利用Adams軟件分析動平臺面積相同或不同及不同鉸鏈布置形式下的機構運動方式。12種鉸鏈布置形式下的3-SPR機構運動方式如表1所示。
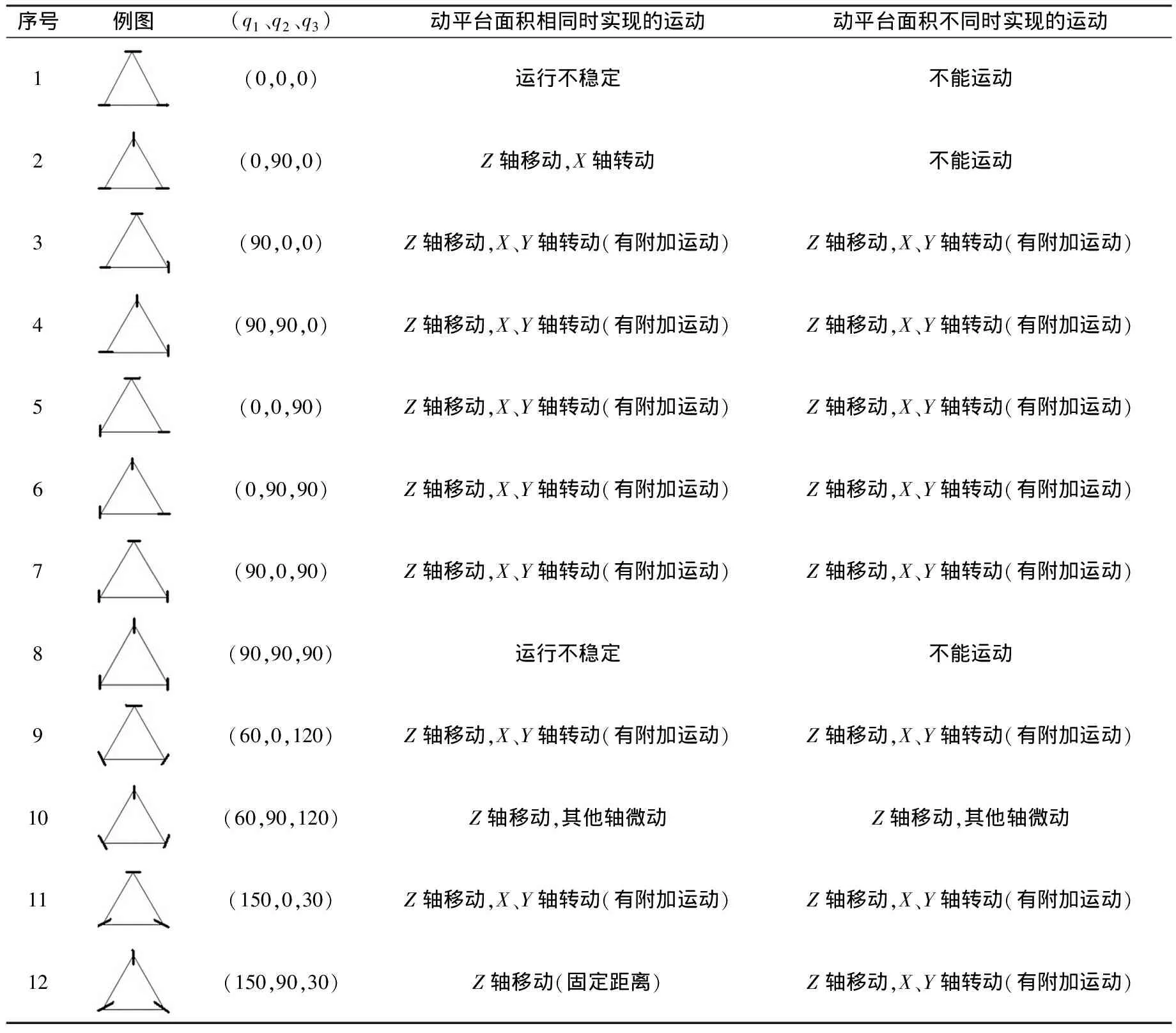
表1 12種鉸鏈布置形式下的3-SPR機構運動方式
從表1中可看出,由于相同或不同的動平臺面積及鉸鏈布置形式導致了3-SPR機構的運動方式各不相同,即:①無論動平臺面積是否相同,均呈現Z軸移動,X、Y軸轉動并有附加運動;②鉸鏈布置角度值為0-0-0和90-90-90時,動平臺面積相同,運行不穩定,動平臺面積不同,均不能運動;③鉸鏈布置角度值為0-θ2-90和90-θ2-0時,θ2值為0°~90°,機構運動方式不變,均為Z軸移動,X、Y軸轉動并有附加運動。④從式(7)、式(9)、式(11)中可知,6個位姿變量中僅有5個在約束方程中,從而使3-SPR機構在運動過程中存在附加運動。
動平臺面積相同或不同及鉸鏈布置形式同樣會導致3-RPS機構的運動方式不同,即:①無論動平臺面積是否相同,均呈現Z軸移動,X、Y軸轉動并無附加運動;②鉸鏈布置角度值為0-0-0、90-90-90、60-90-120時,動平臺面積相同,運行不穩定,動平臺面積不同,均不能運動。③鉸鏈布置角度值為θ1-0-90、0-θ2-90、90-θ2-0、90-0-θ3時,θ1、θ2、θ3取值為0°~90°,機構運動方式不變,均為Z軸移動,X、Y軸轉動。
綜上所述,3-SPR中符合體感機構要求的有:0-0-90,0-90-90,90-0-0,90-0-90,90-90-0,60-0-120,150-0-30; 3-RPS中符合體感機構要求的有:0-0-90,0-90-0,0-90-90,90-0-0 ,90-0-90,90-90-0, 60-0-120,150-90-30。
2 機構鉸鏈布置形式的軟件開發
對于12種典型鉸鏈布置形式的機構進行建模分析,根據機構穩定性特點,開發出了適合3-RPS和3-SPR機構鉸鏈布置形式的軟件,用于輔助鉸鏈布置形式的選擇。機構參數流程圖如圖2所示。
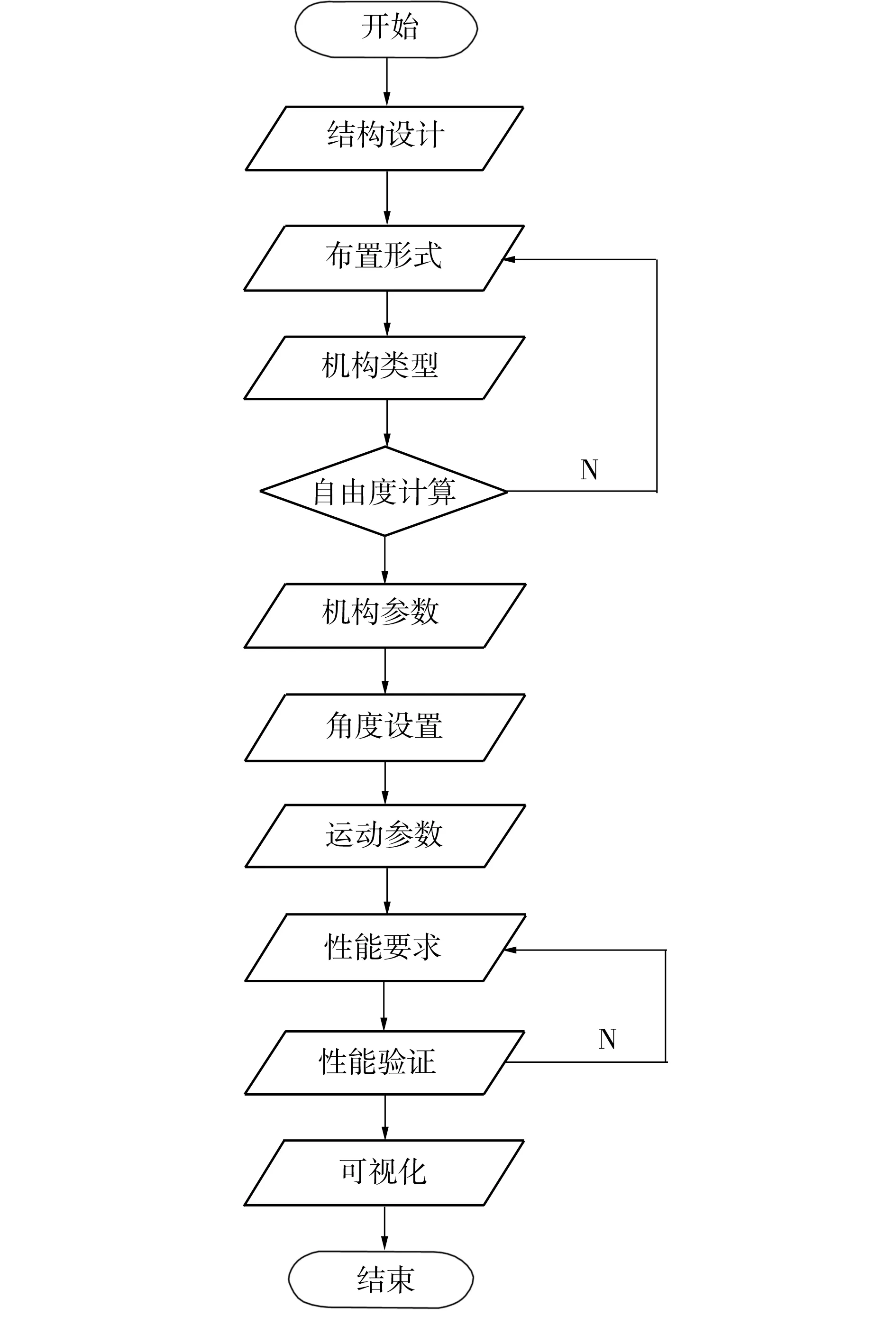
圖2 機構參數流程圖
機構參數包含機構的支點布置形式、平臺結構設計、自由度數目及機構類型。機構的支點布置形式分為三點支撐、四點支撐及六點支撐。平臺結構設計有等邊三角形、等腰三角形、六邊形,機構類型有3-SPR、3-RPS、2-SPR+RPS、2-RPS+SPR等。根據機構結構類型及平臺布置形式,運用修正的Kutzbach-Grubler公式進行自由度的判斷。根據運動參數及性能要求的輸入來判斷機構的性能是否滿足要求,如果性能驗證成功則呈可視化顯示,否則返回重新選擇參數和性能要求。機構參數選擇界面中,平臺高度和平臺面積為初始位置時的機構高度和上下平臺的面積,角度θ1、θ2、θ3的選擇為對12種典型鉸鏈布置中角度的選擇,角度選擇的結果會自動對應出現該角度下應該選擇的獨立變量、旋轉方式和運動方式。如:參數輸入選擇的機構類型為3-SPR、平臺鉸鏈的布置角度分別為90°、0°、90°時,系統會自動顯現出其獨立選擇變量Xo、a、b,歐拉角的旋轉方式選擇了X-Y-X,并得出3-SPR在該鉸鏈布置角度下的運動方式,其與ADAMS分析結果一致。
3 結語
通過對12種典型旋轉鉸鏈布置形式下的3-RPS和3-SPR機構進行自由度計算、數學建模和運動學分析,利用Pro-E和 ADAMS軟件分析及驗證所建模型,篩選出符合體感機構要求的三自由度并聯機構,結果可用于輔助鉸鏈布置形式的選擇。
[1] 陳文家. 典型并聯機構的演化關系及其分類研究[J]. 機械設計,2004,21(5):1-3.
[2] 李秦川, 陳志, 陳巧紅, 等. [PP]S類并聯機構無伴隨運動的結構條件[J]. 機械工程學報, 2010, 46(15): 31-35 .
[3] 楊廷力, 金瓊, 劉安心, 等. 基于單開鏈單元的三平移并聯機器人機構型綜合及其分類[J] . 機械工程學報, 2002, 38(8):31-36.
[4] 王旭永, 王顯正, 張穎, 等. 三自由度并聯驅動平臺機構的位置逆解及其分析[J]. 上海交通大學學報, 1998, 32(1): 102-104.
[5] 鄭曉虎. 基于ADAMS的并聯機構運動分析[J]. 現代制造工程, 2004,33(11): 48-50.
