基于PC104總線的性能檢測系統
2014-03-28 01:53:44朱欣穎袁煥麗
電子設計工程 2014年8期
朱欣穎,袁煥麗
(周口師范學院物理與機電工程學院,河南周口466001)
隨動系統又稱為伺服控制系統,在誤差允許的范圍內,隨動系統的輸入信號通過反饋校正電路,實現對輸出信號的控制[1]。在航空、軍用裝備和工程建設中,隨動系統具有舉足輕重的地位。如雷達的距離跟蹤系統,火炮目標跟蹤瞄準系統,各種導彈的自引系統等[1-2]。隨著武器裝備系統智能化的提高,隨動系統的結構也越加復雜、精密,它運轉的穩定度是武器裝備系統卓越性能評價的重要參考指標。武器裝備常用于外場工作,因此隨動系統的性能檢測設備必須精確、輕巧、便于攜帶[3]。
1 PC104嵌入式系統
PC104是嵌入式計算機的一種,它的片外總線接口是PC104總線[4]。數個PC104板卡可以通過堆疊方式組合到一個大小合適的機箱中,并采用螺栓固定。這樣系統安全、牢固,抗噪聲性能好,即使在惡略的環境中也可以有出色的表現。PC104嵌入式系統具有功耗低,效率高,體積小,可擴展等優點,因此在航空航天、軍用武器裝備、工業控制等領域有著廣泛的應用[5]。
在對武器裝備進行測試維護時,經常對設備中的各類信號進行實時的采集、處理與分析,從而對武器裝備的工作狀態做出判斷,及時了解武器的性能。以往的檢測系統比較笨重,攜帶不便,很難應用于野外工作的需要。同時,受外界多種噪聲的影響,動態信號的采集存在較大的誤差,且缺少人機交互環節。因此,精確性高且便于攜帶的實時檢測系統受到人們的廣泛關注。因此,本文設計了基于PC104總線的性能檢測系統,憑借PC104板卡的高速處理能力完成用戶對隨動系統的實時信號的監測。
2 性能檢測系統的總體設計
設備在運轉時產生的工作狀態信號是衡量其工作性能的重要參數。性能檢測系統必須實時采集設備的工作狀態信號,并能及時做出分析和判斷,這些工作狀態信號引出后,不能影響隨動系統的正常工作,并且性能檢測系統要與隨動系統工作同步。信號由專用電纜引出后,經信號調理設備進行預處理,再接入性能檢測系統。本文設計性能檢測系統是集數據采集和數據分析為一體的自動化設備,具有高效的現場實時數據采集、處理的功能。由快速運算的CPU模塊,精確地數據采集卡和高效的數據處理分析軟件組成,硬件平臺采用PC104板卡搭建。在軟件實現上,操作系統采用性能穩定并具有良好的人機交互的Windows系統,并采用跨平臺Visual C++開發數據分析及處理的應用軟件,Visual C++提供跨平臺的應用程序框架MFC[6]。
3 硬件平臺的實現
硬件環境的設計以PC104板卡作為基本組件,包括CPU、模擬采集卡、數字采集卡。這些板卡通過PC104總線連接,采用標準的固定孔將這些固定在封閉的機箱中,形成堆疊式的緊湊結構,并具有良好的抗噪聲性能,硬件設計電路圖如圖1所示
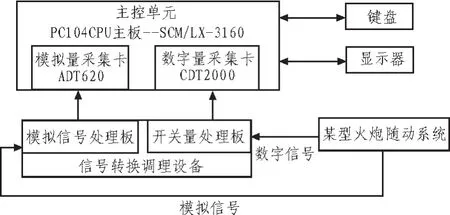
圖1 系統的硬件設計圖Fig.1 System hardware block diagram
3.1 硬件選型
3.1.1 CPU主板
CPU主板采用盛博SCM/LX-3160(圖2)。SCM/LX-3160是一款高性能的“ALL IN ONE”PC104中央處理器。CPU采用AMD Geode LX 800,工作主頻可以達到500 MHz,具有128KB一級高速緩存和128KB二級高速緩存。與PC/AT標準完全兼容,并遵從PC/104標準。在PC機上運行的眾多軟件全部能在以SCM/LX-3160為控制核心的嵌入式計算機系統中運行,這也為簡化應用軟件的設計,提高程序的可移植性。在SCM/LX-3160主板上集成了鍵盤,鼠標、USB 2.0、串口、并口、2個10/100BaseT以太網平板顯示等接口,在其狹小的極小空間里實現PC機幾乎所有的功能。根據工程的需要,在SCM/LX-3160可以擴展不同的板卡,用戶很容易實現嵌入式系統的需求。

圖2 PC104-SCM/LX-3160CPU主板Fig.2 PC104-SCM/LX-3160 CPU mainboard
3.1.2 模擬量采集卡
模擬量采集卡選用的是高功效的ADT620(圖3)。ADT620是基于PC104總線的擴展板,實現對模擬信號的采集。通過PC104總線可將其與盛博SCM/LX-3160構成一個高性能的數據采集與控制系統,適用于結構緊湊、穩定性高的嵌入式應用。該擴展板具有八/十六個單端模擬輸入通道,12位的20微秒或10微秒A/D變換器,±5 V、±10 V或0~+10 V模擬輸入量程,支持C語言等特點。ADT620根據其特點最多可采集十六個單端模擬輸入信號,并將這些模擬信號變換成8位或12位的數字量,然后送到總線上,讀入存儲器中。信號的量化轉換是由一個12位的逐次逼近式的變換器來實現的,高性能的變換器以及在其前的高速采樣-保持放大器可以保能將動態輸入的模擬信號精確地數字化。

圖3 ADT-620模擬量采集卡Fig.3 ADT-620 analog signal acquisition board
3.1.3 數字量采集卡
數字信號采集卡選用CDT2000(圖4)。CDT2000也是基于PC104總線的擴展板,實現對數字信號的采集。與IBMPC兼容盛博SCM/LX-3160構成高性能的數字信號采集控制系統。模塊結構緊湊,非常適合便攜式應用。該擴展板具有獨立的16位8 MHz計數器/定時器,48通道基于TTL或CMOS的可編程數字量I/O,支持C語言等特點。CDT2000供電電壓僅需5 V,48個數字量I/O通道可以直接與外部信號輸出設備連接,在設定的范圍內直接感知開關的閉合、數字事件的觸發或固態繼電器的動作。這樣,不需要擴展外圍復雜的電路,簡化了系統硬件平臺的設計。

圖4 數字信號采集卡CDT-2000Fig.4 CDT2000 digital signal acquisition board
3.2 信號的采集與轉換
某型自行火炮的隨動系統有兩部分高低隨動系統和方位隨動系統組成,方位系統驅動火炮炮筒的水平平移,高低系統驅動炮塔的升降,測量和控制炮筒的高低射角[7]。兩者的工作原理相同,在運轉中它們產生的工作狀態信號必須經過預處理才能接入性能檢測系統(如圖5所示),防止電信號量程過大而燒毀PC104擴展板。模擬信號如電源信號,位置控制信號需經過信號調理電路的隔離分壓板進行濾波、隔離、分壓,轉換至ADT620合適的量程后,再接入性能檢測系統。數字信號是隨動控制箱工作狀態信號,以高低電平的形式存在。數字信號經過信號調理設備的光電隔離控制板,轉煥至TTL電平后再接入CDT2000,CDT2000可以直接感知電平的閉合。

圖5 總體連接圖Fig.5 Collection of overall structure diagram
4 軟件設計
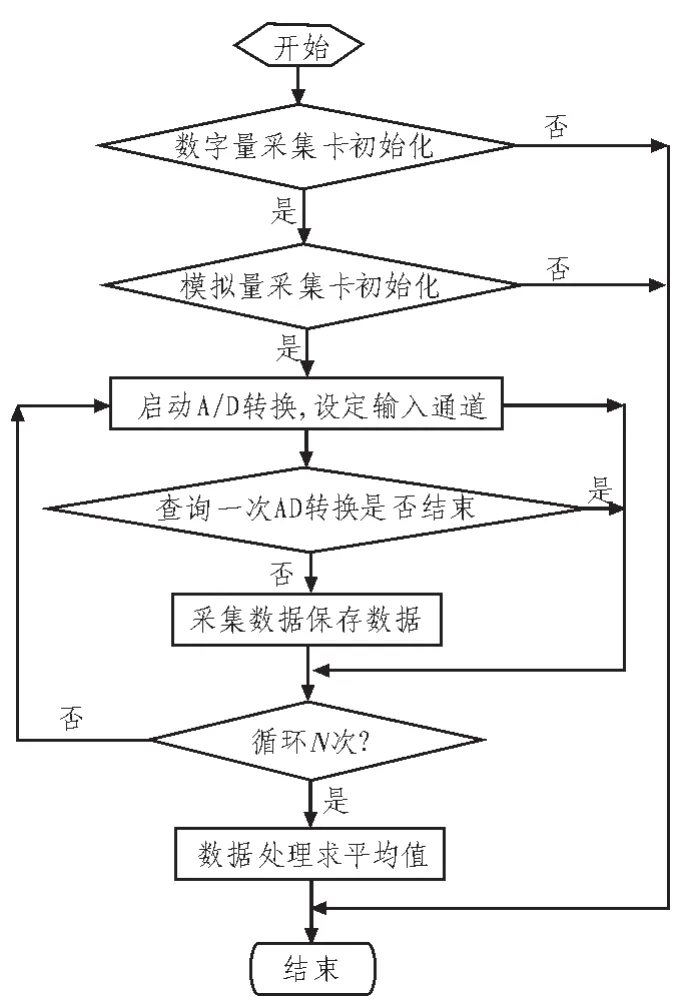
圖6 A/D轉換流程圖Fig.6 Flow chart of the A/D conversion system
本系統的運行環境是Windows XP系統,在可視化的操作環境下,可以很好地實現人機交互。開發工具是Visual C++,它提供封裝了大量API函數的MFC函數庫,這可以大大簡化應用程序的開發周期。應用程序采用面向對象的C++語言來設計,總體分為采集卡驅動模塊和性能檢測模塊。C++語言最大的特點是支持類與對象[8],將各個模塊分別封裝,形成采集卡操作類和性能檢測類。
4.1 采集卡初始化
盛博公司的數據采集卡為程序設計者提供了豐富的外包函數。對采集卡的操作涉及到數據存儲單元的地址,數據的讀寫函數,動態鏈接庫等問題。在Visual C++中建立基于MFC對話框的工程,設計采集卡操作類,對用戶不可見,保障程序的安全性。利用對象調用動態鏈接庫中的外包函數,可以很方便的對采集卡的操作,實現數據的讀寫與顯示。流程圖如圖6所示,系統上電后,采集卡初始化,判斷打開的是哪一個采集卡。ADT620打開設定模擬輸入通道范圍,啟動AD轉換,將AD值保存到全局數組中;CDT2000打開,直接感知高低電平,兩者都為性能檢測模塊提供分析數據。
4.2 數據處理與顯示
性能檢測模塊實現對采集數據的分析處理,這部分設計的是否合理,直接影響到系統的總體性能。性能檢測就是根據隨動系統的工作狀態信號來判斷其性能是否良好。因此,檢測必須和隨動系統的工作進程同步,分別對高低隨動系統和方位隨動系統進行檢測。建立信號檢測對話框,作為人機交互的友好界面,并生成高低系統檢測類和方位系統檢測類。消息映射是Visual C++開發工具的基本特征,考慮到動態信號存在延時問題,信號采集讀取以定時查詢消息方式來實現。MFC提供大量的API函數,通過SetLedlightStatue()等函數的調用實現數據的分析與顯示。高低系統工作時,先檢測電源信號,然后檢測指令信號和工作狀態信號。方位系統檢測與高低系統檢測基本原理一致。
5 結果分析
性能檢測系統設計完成后,通過專用電纜與某自行火炮隨動系統的信號調理設備相連接。通電復位,系統先進行自檢,檢測電路連接是否正常。隨動系統運轉,信號引出、預處理、采集、轉換,交給應用程序分析讀取。方位檢測界面如圖7所示,高低檢測與方位檢測類似。

圖7 系統檢測界面Fig.7 Testing result of diagram
6 結束語
本檢測系統采用基于PC104總線的CPU和數據采集板相結合的方式,通過Visual C++開發工具實現了用戶對信號的實時采集、處理、分析與顯示。信號采集的所有控制功能由PC104采集擴展板完成,大大精簡外圍電路的設計。硬件設計采用數量少且效率高的開發元件,降低了系統成本,提高系統的穩定性。運行在Windows XP操作系統的應用程序實現采集數據的分析與顯示,Visual C++與Windows XP提供的友好界面使用戶可以直觀的了解整個隨動系統的運轉狀況。C++語言是有C語言的特點,這對硬件驅動程序的編寫非常有利。同時C++語言最主要的特點是面向對象,根據各模塊建立相應的類,并進行封裝,使軟件整體運行可靠穩定。該檢測系統具有功耗低,體積小,抗噪性能優良,穩定性高等優點,在應用中具有有良好的推廣前景和顯著的軍事經濟效益。
[1] 蔣樂濤.某型數字化隨動系統分析及其調測系統設計[D].南京:南京理工大學,2008.
[2] 鐘斌,程文明,唐連生,等.隨動系統的模糊自適應整定PID變阻尼控制[J].系統仿真學報,2006,18(11):3200-3203.ZHONG Bin,CHENG Wen-ming,TANG Lian-sheng,et al.Variable damping ratio control of servo system by fuzzy adaptive adjust PID[J].Journal of System Simulation,2006,18(11):3200-3203.
[3] 陳志武.某高炮隨動系統故障檢測研究[D].南京:南京理工大學,2003.
[4] 陳勇,劉曉平,應懷樵.基于PC104的高性能便攜式數據采集系統[J].測控技術2009,29(1):24-27.CHEN Yong,LIU Xiao-ping,YING Huai-qiao.High quality and portable data acquisition sysytem based on PC104 bus[J].Measurement Control Technology,2009(1):24-27.
[5] 楊公勛,屈鵬宇.基于PC104工控機的嵌入式直流監控裝置的設計[J].工礦自動化,2002(2):25-27.Design of an Embedded DC Control and Monitoring Device based on the PC104 industry controller[J].Industry and Mine Automation,2002(2):25-27.
[6] 劉曉華.精通MFC[M].北京:電子工業出版社,2003.
[7] 張謝慶.一種便攜式隨動系統綜合測控裝置研究[D].南京:南京理工大學,2009.
[8] 譚浩強.C++程序設計[M].北京:清華大學出版社,1999.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45