基于Elman網絡的船舶運動模型辨識
2014-04-08 08:24:07孫洪波施朝健
上海海事大學學報 2014年1期
孫洪波, 施朝健
(1.上海海事大學 商船學院,上海 201306; 2.集美大學 航海學院,福建 廈門 361021)
0 引 言
目前對于船舶操縱運動數學模型的研究基本上從兩方面著手:一是機理建模研究,從基本運動方程出發,通過確定其水動力求解其運動參數的水動力模型;二是辨識建模研究,將船舶看作一個動態系統,舵角作為輸入,船舶運動參數作為輸出,進行水動力參數辨識和函數形式傳遞的船舶模型辨識.前一種方法需要測量和計算復雜的水動力導數,工作量大,而且某些水動力導數的理論估算目前還不能滿足工程精度的要求,只能通過拘束船模試驗精確確定,費用高,可行性較低.后一種方法中的水動力參數辨識,存在無法完全辨識的問題,而傳遞函數形式的船舶模型,更適合于寬闊水域的船舶操縱,不適合具有高強機動性的船舶操縱控制,若要應用于仿真,還需補充目前尚無統一形式的船舶縱向方程[1].近幾年,隨著神經網絡研究的再度興起,神經網絡在模式識別、系統辨識、圖像處理和自動控制等眾多領域得到廣泛應用[2-4],在運動建模與仿真,特別是在船舶操縱性中的應用也越來越受到國內外眾多學者[5-8]的關注.神經網絡具有自學習、自適應的能力,能夠從輸入數據中自動學習,抽取包含在數據中的映射關系,因此可以用來學習船舶在航行過程中的動態操縱特性.目前, 在系統辨識中應用最多的是多層前向網絡. 該網絡具有逼近任意連續非線性函數的能力, 但這種網絡結構一般是靜態的, 而人們更關心控制系統的動態特性, 這恰恰是反向傳播(BackPropagation,BP)神經網絡等前饋型網絡所缺乏的.與靜態前饋型神經網絡不同,動態遞歸網絡通過存儲內部狀態使其具備映射動態特征的功能, 從而使系統具有適應時變特性的能力, 更適合于非線性動態系統的辨識.動態遞歸神經網絡是控制系統建模和辨識中極具發展潛力的網絡.[9]本文將動態遞歸神經網絡應用于船舶操縱運動辨識,建立一種基于Elman神經網絡的辨識模型.該網絡模型與已知的船舶動力學基本模型相對應,使網絡結構具有明確的物理意義.隨后,利用幾種典型的船舶操縱性試驗數據對網絡模型進行訓練和驗證,得到比較滿意的結果.
1 船舶運動數學模型
船舶的實際運動是一種具有6個自由度的異常復雜的運動.對大多數情況下的船舶運動及控制而言,可以忽略船舶垂蕩、橫搖和縱搖運動.國際海事組織(International Maritime Organization,IMO)要求的幾種典型的船舶操縱性試驗極少包含對船舶垂蕩、橫搖和縱搖運動的數據記錄.本文的主要目的在于驗證Elman神經網絡對船舶運動辨識的可行性.考慮上述原因,僅對船舶3自由度運動進行辨識與建模,不考慮風、浪和流等外界條件的影響.
船舶3自由度的動力學方程[5]為
(1)
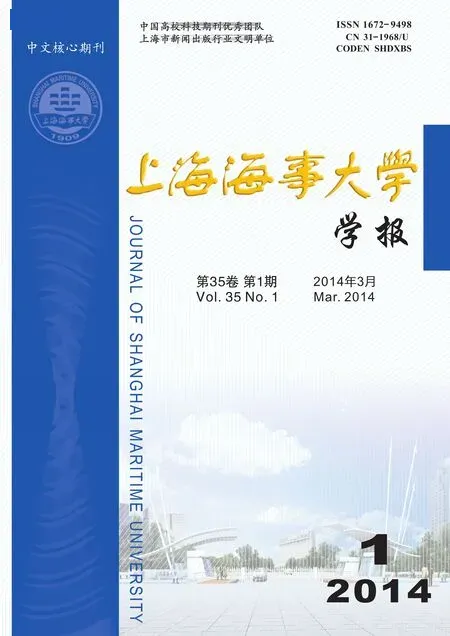
船舶3自由度的運動學方程為
(2)
式(1)和(2)中:m為船舶質量;u,v,r,x,y,Ψ,xg分別為船舶縱向速度、橫向速度、轉艏角速度、縱向位移、橫向位移、航向、船舶重心距船中縱向位置;m11和m22為船舶附加質量,I26,I62,I66為船舶附加慣性矩,無量綱化數值見表1;Fx和Fy為作用于船體的合力,其中包括螺旋槳推力和舵力,分別為螺旋槳轉數n和舵角δ的函數;Nz為作用于船體的合力矩.式(2)中矩陣為船舶附體坐標轉換為大地坐標的轉換矩陣.

表1 船舶附加質量和附加慣性矩
將式(1)和(2)聯立,得到6個一階微分方程表示的船舶運動數學模型.為便于計算機動態仿真,將式(1)寫成離散時間系統的狀態方程為

(3)
2 Elman神經網絡辨識模型
2.1 Elman神經網絡
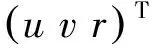
Elman神經網絡結構見圖1.
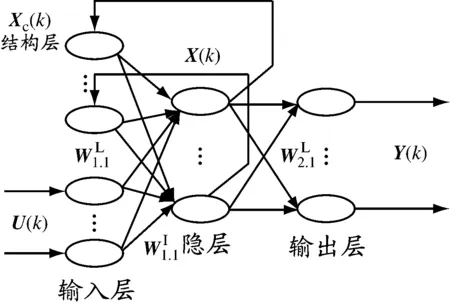
圖1 Elman神經網絡結構
在無偏置的情況下對應的方程為
(4)
2.2 網絡結構確定
神經網絡對系統狀態方程的辨識過程見圖2.
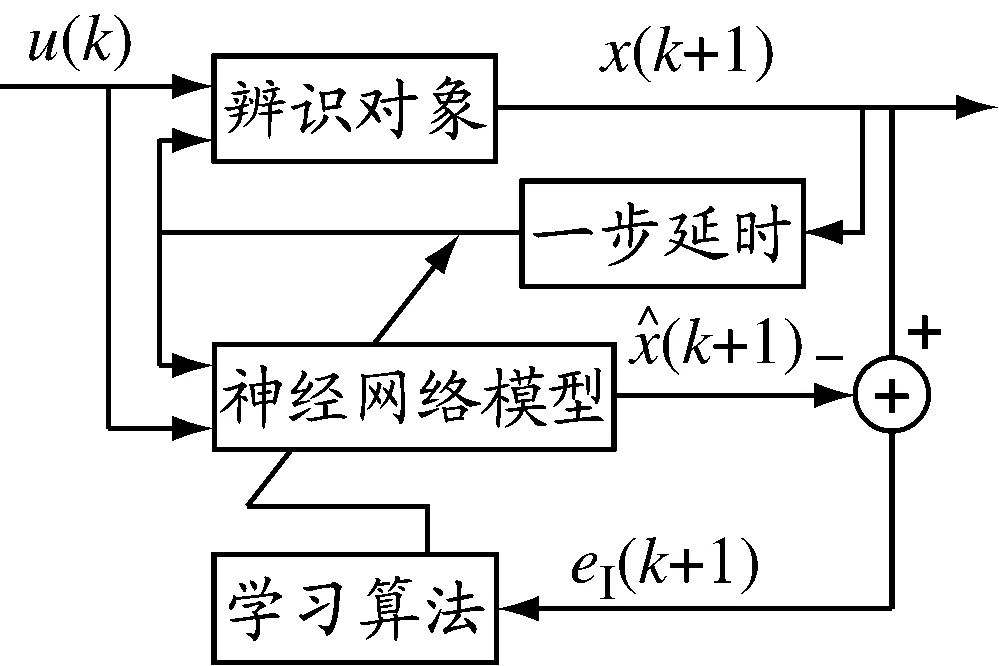
圖2 神經網絡串并聯辨識模型
f(x)=2/(1+e-2x)-1,x∈(-∞,∞)
(5)
2.3 樣本的組織與訓練
選取較易獲取的幾種典型的船舶操縱性試驗數據作為網絡的訓練樣本.到目前為止,操縱性試驗的類型有18種之多,各行業組織和規則所要求的試驗項目也不盡相同.[13]IMO決議A.751所要求的試驗項目包括旋回試驗、Z形試驗和停車慣性試驗,試驗數據較易獲取.因此,本文以一艘載質量為5萬t的散貨船為例,選用該船的10度Z形試驗、20度Z形試驗、滿舵旋回試驗和倒車停船試驗數據作為網絡的訓練和檢驗樣本.船型數據見表2.限于篇幅,本文僅列出該船的10度Z形試驗數據,見表3.
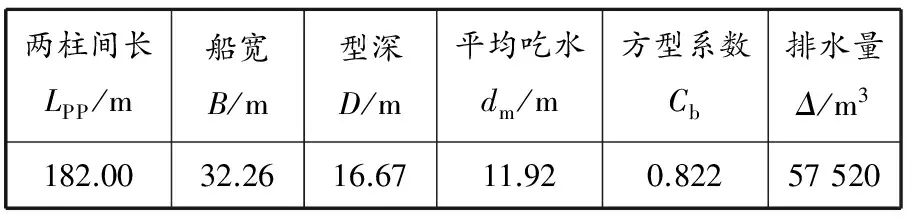
表2 載質量為5萬t散貨船的主尺度
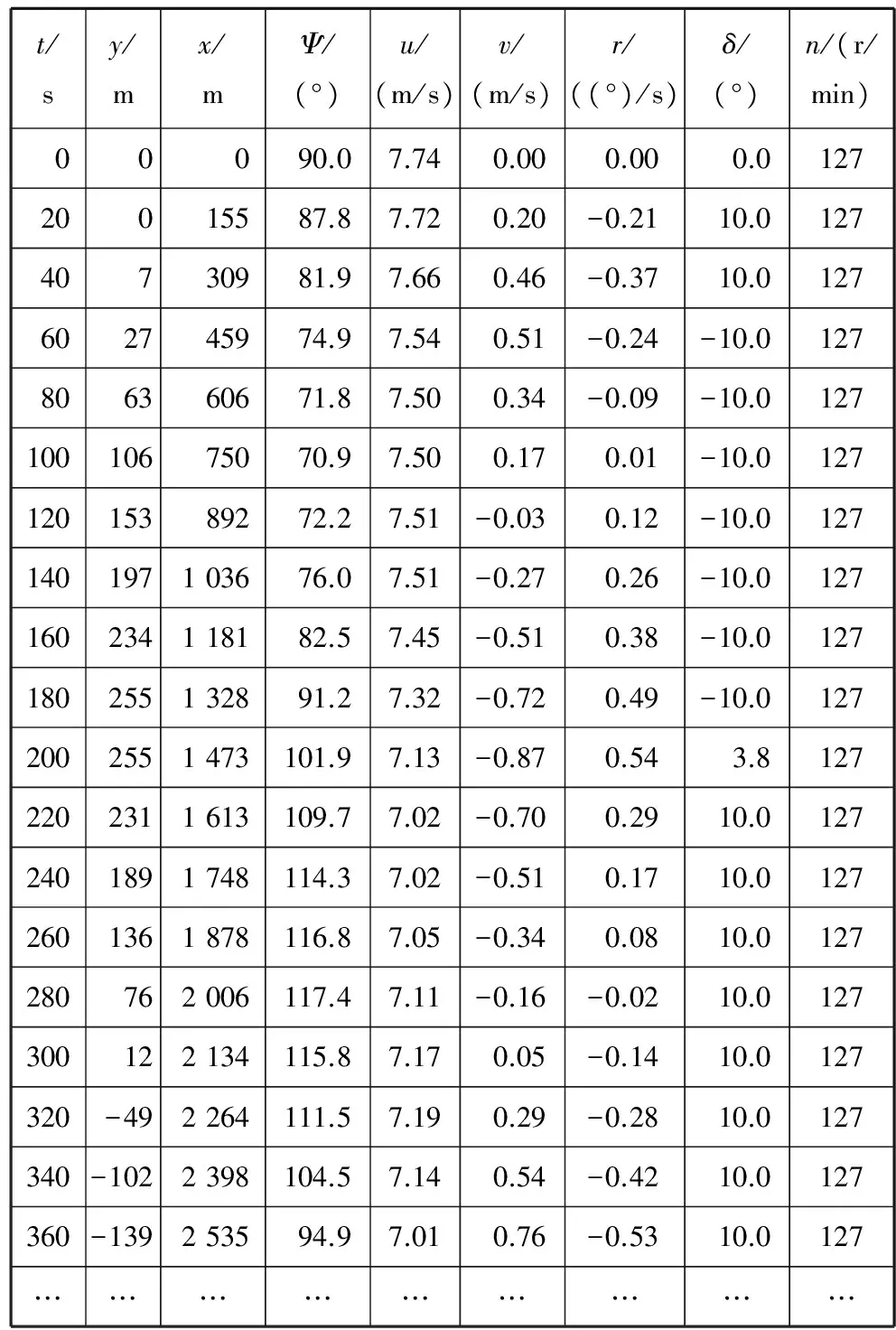
表3 10度Z形試驗數據
將表3中的u,v,r,δ,n作為網絡訓練樣本,取值范圍分別為[-3.10,7.74],[-1.42,1.42],[-0.92,0.92],[-35.0,35.0]和[-90,127];y,x,Ψ作為檢驗樣本.
首先根據訓練樣本的取值范圍將其歸一化到[-1,1]后對網絡進行訓練,然后分別選取訓練樣本輸入訓練好的網絡,將網絡輸出(uvr)代入式(2)計算出(yxΨ),最后將計算結果與檢驗樣本進行比對驗證網絡模型辨識的可行性和精確性.
3 仿真驗證
選用10度Z形試驗、20度Z形試驗、滿舵旋回試驗和倒車停船試驗數據對網絡進行訓練并仿真,結果見圖4~7.
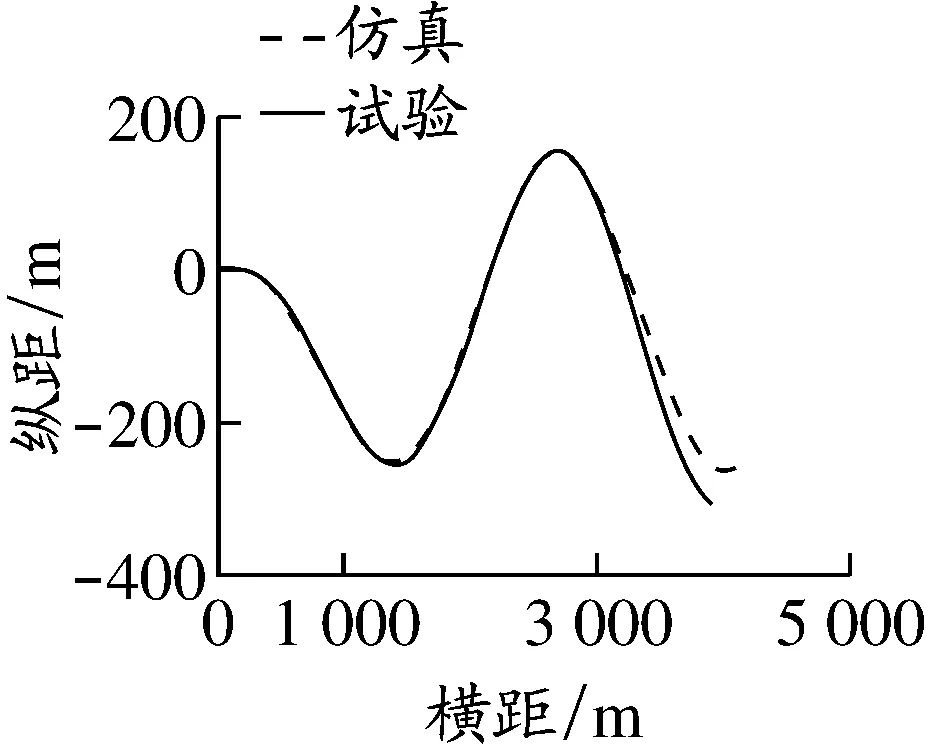
圖4 10度Z形試驗

圖5 20度Z形試驗
從仿真結果可以看出,基于Elman神經網絡的辨識模型可以反映船舶的操縱性能.此外,雖然神經網絡具有較強的逼近能力,但其泛化能力有限[14],利用同一網絡不能精確地模擬船舶各種操縱性能,因此仿真結果都存在一定的誤差.
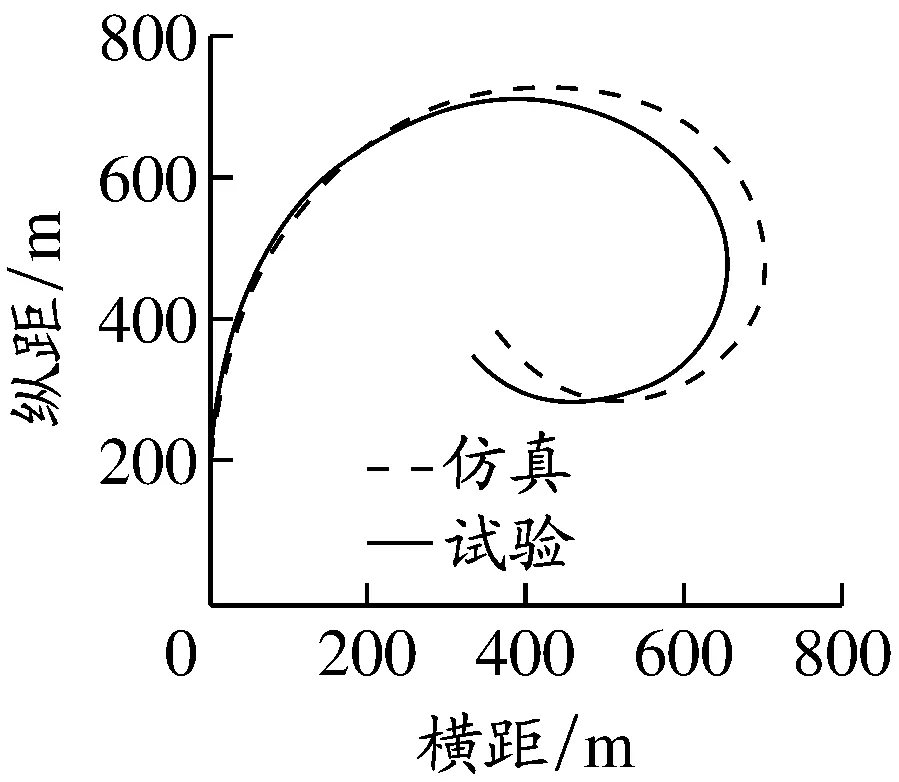
圖6 右滿舵旋回試驗
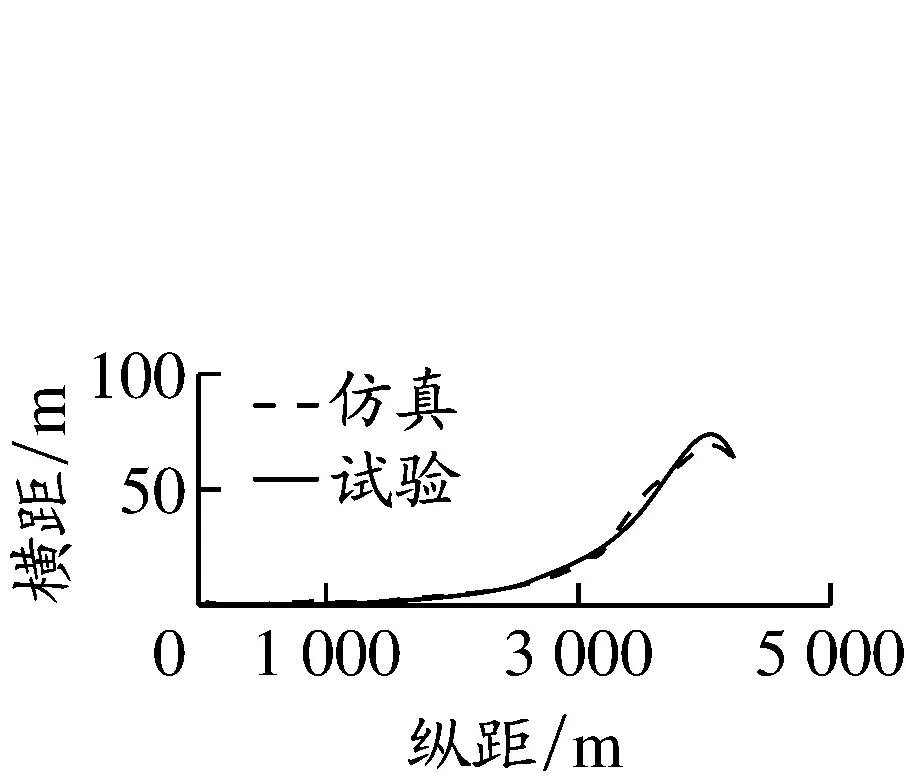
圖7 緊急停船試驗
4 結束語
在船舶操縱運動建模及控制應用中,存在大量的系統辨識問題,因此開展神經網絡在非線性系統辨識及控制領域中的應用研究具有實際意義.本文建立一種基于簡化的Elman神經網絡的辨識模型,并通過幾種典型的涵蓋船舶輕度、中度和重度的船舶操縱性試驗數據訓練該網絡,獲得反映船舶動力學特性的神經網絡模型,并進行仿真驗證.仿真結果表明辨識模型基本符合船舶操縱性規律.由于反映船舶各種操縱狀態的試驗數據,特別是小采樣步長的實驗數據,較難獲取,辨識結果存在一定誤差,但就本文所采用的較易獲得的船舶操縱性試驗樣本而言,該方法的辨識結果是可以接受的.
參考文獻:
[1]賈欣樂, 楊鹽生. 船舶運動數學模型——機理建模與辨識建模[M]. 大連: 大連海事大學出版社, 1999: 234-246.
[2]楊蕊蕊, 朱大奇. 基于生物啟發模型的自治水下機器人平面軌跡跟蹤控制[J]. 上海海事大學學報, 2011, 32(3): 58-62.
[3]金雪丹, 施朝健. 圖像處理與神經網絡識別技術在船舶分類中的應用[J]. 上海海事大學學報, 2007, 28(1): 11-16.
[4]翟久剛, 田延飛, 嚴新平. 基于BP神經網絡與殘差分析的船舶交通流量預測[J]. 上海海事大學學報, 2013, 34(1): 19-22.
[5]SKJETNE R, SMOGELI ? N, FOSSEN T I. A nonlinear ship manoeuvering model: identification and adaptive control with experiments for a model ship[J]. Modeling, Identification & Contr, 2004, 25(1): 3-27.
[6]KALINLI A, SAGIROGLU S. Elman neural networks in model predictive control[J]. J Inform Sci & Eng, 2006(22): 1555-1568.
[7]林莉, 萬德鈞, 李滋剛. 基于人工神經網絡的船舶運動數學模型的辨識[J]. 東南大學學報, 2000, 30(2): 71-74.
[8]奚海蛟, 張曉林. 基于Elman網絡的共軸式直升機動力學系統辨識[J]. 北京航空航天大學學報, 2008, 34(7): 861-864.
[9]高欽和, 王孫安. 基于Elman神經網絡的非線性動態系統辨識[J]. 計算機工程與應用, 2007, 43(31): 87-89.
[10]張德豐. MATLAB神經網絡應用設計[M ]. 北京: 機械工業出版社, 2009: 191-198.
[11]王宏偉, 楊先一, 金文標.基于Elman 網絡的時延預測及其改進[J]. 計算機工程與應用, 2008, 44(6): 136-138.
[12]DEMUTH H, BEALE M. Neural network toolbox user’s guide[M]. US: The MathWorks, Inc, 2000: 12-15.
[13]洪碧光. 船舶操縱原理與技術[M]. 大連: 大連海事大學出版社, 2007: 130.
[14]趙遠東,胡為堯. 人工神經網絡泛化性能改進[J]. 南京信息工程大學學報, 2011, 3(2): 164-167.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03