測量機器人無儀器高法測設高程
2014-04-18 02:50:25許輝熙朱坤奠
地理空間信息 2014年4期
范 本,許輝熙,朱坤奠
(1. 四川建筑職業技術學院 測繪工程系,四川 德陽 618000;2. 成都云隆科技有限公司,四川 成都 610045)
測量機器人無儀器高法測設高程
范 本1,許輝熙1,朱坤奠2
(1. 四川建筑職業技術學院 測繪工程系,四川 德陽 618000;2. 成都云隆科技有限公司,四川 成都 610045)
全站儀無儀器高法測設高程需要測量人員反復照準、讀數和計算。測量機器人的自動化和智能化特性,可以解決無儀器高法高程測設時繁雜的人為干預,實現具有一定自動化的高程測設。
測量機器人;無儀器高;高程測設;施工放樣

對一些高低起伏較大的工程放樣,如大型體育館的網架、橋梁構件、廠房及機場屋架等,可以使用全站儀無儀器高法直接放樣高程[1]。全站儀無儀器高法不需要量取儀器高,但在定待測設點的時候需要進行多次調整,數據計算和重復操作給測設帶來很大不便。測量機器人可在一定范圍內自動搜索棱鏡,自動精確照準目標,通過一定的接口技術與電腦進行數據交換,實現內外業一體化操作。本文研究了測量機器人無儀器高法高程測設的自動化實現。
1 全站儀無儀器高法原理
如圖1,欲測設建筑物上待測設點B的高程,在O點設置儀器,在已知水準點A和待測設點B上設置目標棱鏡(兩棱鏡高相同,設為l),后視A點,測得斜距S1和垂直角α1;前視目標點B,測得斜距S2和垂直角α2(Δh1、Δh2為前后視棱鏡距全站儀中心水平視線高差),則有 :

從而推出:

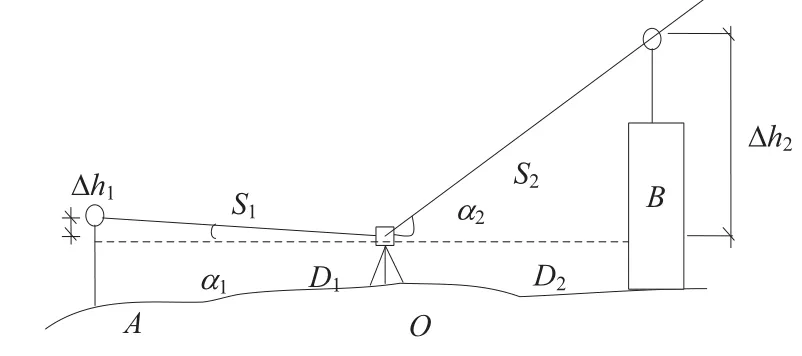
圖1 全站儀無儀器高法原理
在實際測設中,測站點與目標點之間的水平距離一般都比較遠,在使用式(1)計算HB時應該考慮地球曲率與大氣折光的誤差影響。設OA、OB水平距離分別為D1(D1=S1·cosα1)、D2(D2=S2·cosα2),則式(2)變為:
式中,K為大氣垂直折光系數;R為地球曲率半徑。得到HB之后,通過與設計高程進行對比,指揮并測設出B點高程。
2 測量機器人無儀器高測設高程流程
為減少計算工作量,使用筆記本電腦通過在線控制測量機器人實現實時測設。整體思路為:①計算機與測量機器人聯機;②采集必要的測量數據,包括測站距目標點水平距離、垂直角;③根據軟件提示進行放樣;④下一點測設。測設軟件結構圖如圖2。
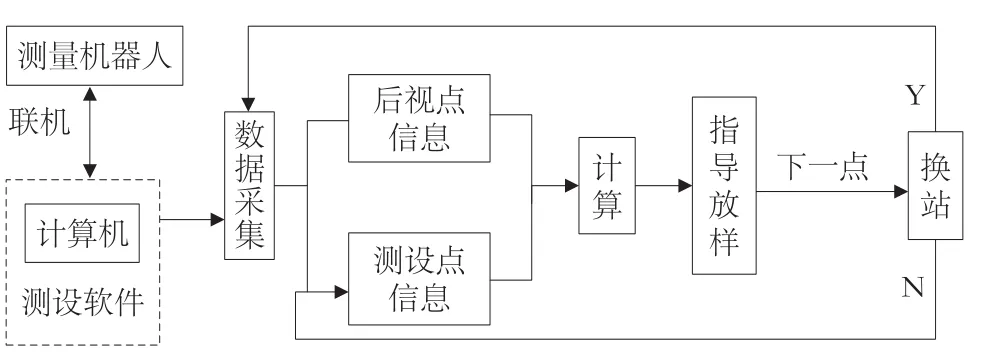
圖2 結構圖
3 測量機器人無儀器高測設高程實現
3.1 硬件系統
所使用的測量機器人為徠卡TS30。TS30測角精度為0.5",有棱鏡測距精度為0.6 mm + 1×10-6,鎖定模式測量時間<0.15 s[2]。無儀器高法測設高程精度主要受測垂直角和測距的影響,TS30在測角測距方面的精度優勢可以保證高程測設的精度要求。
3.2 軟件系統
軟件采用VB編寫,主要包含以下幾大功能:
1)儀器聯機。為確保成功調用GeoCOM中的函數語句,需要把對應的動態鏈接庫和徠卡公司提供的功能模塊添加到項目工程中[3]。函數的參數都可以在參考目錄[4]中查找。①使用函數VB_COM_Init()初始化GeoCOM接口[5]。②使用函數VB_COM_ OpenConnection(Port, Baud, Retries),設置儀器與計算機間通信參數,打開通信端口。
2)點位信息采集[6,7]。在點位信息采集前要對儀器進行必要的設置,如棱鏡模式、測距模式、大氣改正等設置。用到的函數主要有:①儀器自動粗瞄時,使用搜索目標函數VB_AUT_Search2(Hz,V,bDummy),參數Hz和V分別代表儀器搜索水平角和天頂距范圍(單位rad),bDummy為預留參數,一般設為False[7]。② 儀器粗瞄完成后,進行精確瞄準,使用函數VB_AUT_ FineAdjust3(DSrchHz,dSrchV,bDummy),參數DSrchHz、dSrchV應設置為比較小的數據,如0.03、0.05。③測角測距函數VB_BAP_MeasDistanceAngle(BAP_DEF_DIST, Hz,V,distance),各參數分別為水平角、天頂距和斜距。④放樣過程中,為了減少連續的瞄準操作,把儀器的EDM測量模式設置成鎖定(Lock)模式。此模式下,儀器會持續采集測量數據并把前視棱鏡采集的數據返回給軟件,軟件通過實時計算實現實時指導放樣功能。
3)指導放樣。利用已知水準點高程和測得的前后視目標的垂直角和斜距,按式(3)計算待測點高程H′B,然后由待測點已知高程HB計算 ΔHB= HB-H′B,利用得到的數據按照軟件提示指導放樣。
4)換站/下一站。使用換站功能,會把前后視點信息采集的數據全部清空。因此,當搬站到下一測站,前后視信息需重新采集。若不需換站,使用下一點功能。這時,后視點信息采集的數據繼續存在,前視點數據清空。在需測設的下一點安置棱鏡,儀器大致瞄準進行前視點數據采集,按照指示進行高程測設即可。
4 精度分析
由式(3)不難看出,無儀器高法高程測設精度主要受測距和測角精度影響。對式(3)進行微分,轉化為中誤差公式:

由式(4)可見,測距誤差對測設誤差的影響,隨著前后視相對垂直角及相對距離的增大而增大;測角誤差對測設的影響隨著相對垂直角的增大而增大;測距影響大于測角影響。假設前視點垂直角為60°,前視平距500 m,后視垂直角為30°,后視平距500 m,根據式(4)進行精度估算mH=3.07 mm。前面假設都是極限條件,實際中,在使用無儀器高法測設高程時,由相應規范,橋梁構件等高程測設允許偏差為±3 mm[8],因此使用此方法測設高程完全滿足精度要求。
使用TS30測量機器人進行無儀器高高程測設,具有以下特點:①除架設儀器和前后視轉方向外,測設過程中繁瑣的數據計算和精確瞄準目標等完全不需要人為干預。②此研究支持帶有ATR功能的徠卡其他型號測量機器人,如TCA2003、TPS1200系列、TM30等。③可以應用于廠房、橋梁、基坑等高差較大的工程領
[1] 張正祿,李廣云,潘國榮,等.工程測量學[M].武漢:武漢大學出版社,2005
[2] 徠卡測量系統有限公司.徠卡TS30產品手冊[Z].徠卡測量系統有限公司,2009
[3] 范百興,李宗春,李廣云,等.基于放樣原理的特種罐內測法容量計量技術[J].測繪科學技術學報,2008,25(5):372-375
[4] Leica TPS1200+ Leica TS30/TM30 GeoCOM Reference Manual[Z]. Leica Geosystems AG,Heerbrugg Switzerland,2009
[5] 陳秀忠,錢林.地理數據通信接口技術在自動監測系統中的應用[J].測繪通報,2010(1):42-44
[6] 范本,劉星,青舟.測量機器人在線施工放樣軟件研究[J].測繪,2011,34(6):256-258
[7] 范本.基于測量機器人TM30技術地鐵隧道建設自動變形監測研究[D].重慶:重慶大學,2012
[8] GB50026—2007.工程測量規范[S].
[9] 鄔昱昆,王義修,葛妹.測量機器人變形監測自動化系統的研究[J].地理空間信息,2007,5(6):121-123
P258
B
1672-4623(2014)04-0042-02
10.11709/j.issn.1672-4623.2014.04.014
范本,碩士,主要從事工程測量及變形監測的教學與研究工作。
2013-09-29。
項目來源:國土資源部地學空間信息技術重點實驗室開放基金資助項目(KLGSIT2013-10)。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08