基于積分切換增益的永磁同步電動機滑模控制研究
2014-04-27 08:44:38肖海峰
科技視界 2014年24期
肖海峰 楊 柳
(1.西安航空學院,陜西 西安 710072;2.陜西省現代建筑設計研究院,陜西 西安 710048)
0 引言
永磁同步電機具有效率高,結構簡單等優點。傳統的PI速度控制在永磁同步電動機矢量控制中被廣泛應用,但由于算法本身對電機本體參數的依賴,使得其魯棒性較差。近年來,滑模變結構控制受到越來越多重視,該系統的動態品質由開關面的參數決定,與系統的參數、擾動無關,具有很好的魯棒控制性。文獻[1]將滑模變結構控制方法引入直接轉矩控制中的轉矩和磁鏈控制器,動態響應快,魯棒性強,且詳細證明了系統的漸進穩定性。缺點在于滑模變結構切換增益大,滿足穩定性的參數選擇復雜,滑模變結構的抖振問題沒有得到有效解決。文獻[2]將滑模變結構控制策略用于直接轉矩控制中,轉矩和磁鏈脈動減小,快速性和魯棒性得到增加。缺點在于滿足廣義滑模條件的參數設置復雜,設置不當會引起系統的不穩定。文獻[3]采用指數趨近律滑模變結構控制器作為永磁同步電動機調速系統的轉速調節器,并設計了變參數SMC方法,給出了控制器的設計過程,該方法提高了系統的魯棒性。
本文采用的是一種基于積分切換增益的滑模控制器設計,它可以有效地消除抖振,仿真驗證該控制器的有效性。
1PMSM數學模型
采用id=0的PMSM轉子磁場定向控制,電壓方程如下:

其中,Ld、Lq為 d、q 軸電感;ud、uq為 d、q 軸電壓;id、iq為 d、q 軸電流;R為定子電阻,p為極對數,ω為轉子電角速度,Te、TL為電磁轉矩和負載轉矩,ψa為永磁體與定子交鏈磁鏈。
2 速度環滑模控制器設計
取PMSM系統的狀態變量為:

式中:ω*為轉速給定;ω為實際轉速。
由式(2)-(4)得:
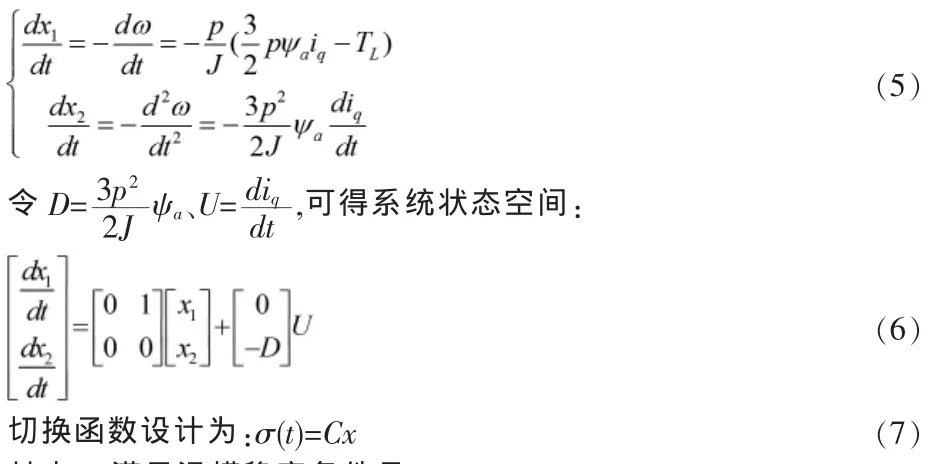
其中C滿足滑模穩定條件且CB>0;

在積分項 ρ的表達式中,當 ρ>0 時,Kfρ<0,當 ρ<0 時,Kfρ>0。 有效地避免了當系統不在滑動模態階段時切換項增益的增大。
3 控制策略
根據上述分析可以得到滑模變結構控制系統框圖1所示,速度環滑模控制器節器替代了傳統的PI控制器,其輸入為轉速誤差,輸出為電流值參考值。
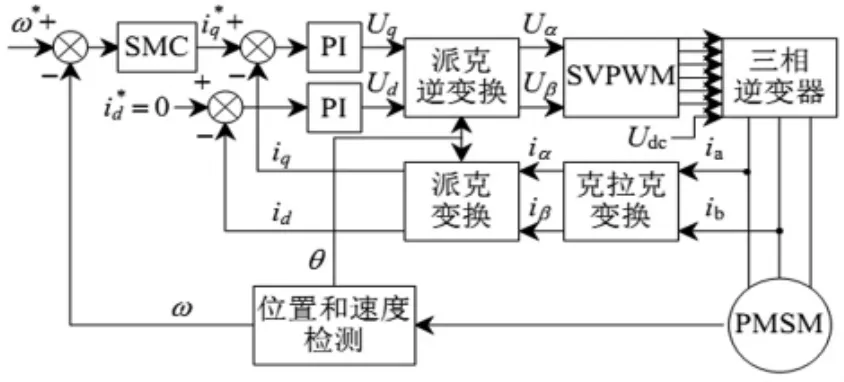
圖1 調速系統框圖
4 仿真結果分析
采用Matlab/simulink仿真,仿真中永磁同步電機的參數為:額定功率為1.5kW;額定轉速為2500r/min;永磁磁鏈為0.104Wb;極對數為4;電樞電阻為0.024Ω。
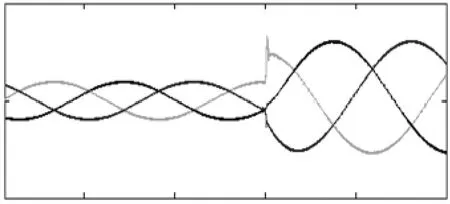
圖2 vsc控制下電流響應
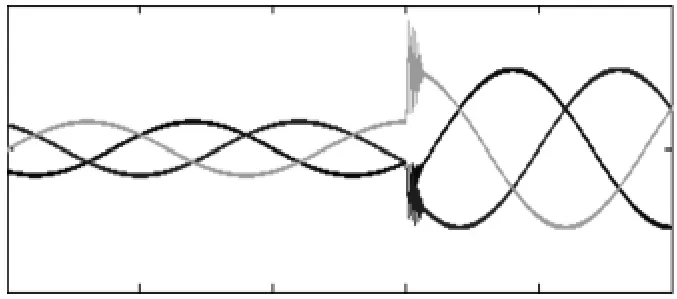
圖3 pi控制下電流響應
如圖2、3所示,速度環分別采用積分切換增益的滑模變結構和PI控制策略,與PI速度控制相比,采用積分切換增益的控制器作用時,提高了系統的動態響應和抗擾能力。通過仿真結果并與PI速度控制器相比較,證明了該速度控制策略的可行性。可以由圖3看出PI控制下電流響應存在超調,對負載的擾動魯棒性較差,而滑模控制在負載突變情況下有較強的魯棒性。
5 結論
1)為提高永磁同步電機調速系統的動態品質,提出一種基于積分切換增益的滑模控制器,該控制率可以有效抑制滑模固有的抖振現象。
2)采用該速度控制器控制性能優于PI速度控制器。
[1]王煥鋼,徐立文,黎堅,等.一種新型的感應電動機直接轉矩控制[J].中國電機工程 學 報 ,2004,24(1):107-111.Wang Huangang,Xu Wenli,Li Jian,et al.A new approach to direct torque control of induction machines[J].Proceedings of the CSEE,2004,24(1):107-111(in Chinese).
[2]Xu Z,Rahman M F.Direct torque and flux control of an IPM synchronous motor using variable structure control approach[C]//The 30th Annual Conference of the IEEE Industrial Electronic Society.Pusan,Korea,2004.
[3]汪海波,周波,方斯琛.永磁同步電機調速系統的滑模控制[J].中國電機工程學報,2009,29(9):71-77.Wang haibo,Zhou Bo,Fang Sichen.A PMSM sliding mode control system based on exponential reaching law[J].Proceedings of the CSEE,2009,29(9):71-77(in Chinese).
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26