電力系統(tǒng)穩(wěn)定器在船舶電力系統(tǒng)中的應用
2014-05-07 03:19:26許麗霞施偉鋒張威
船電技術 2014年12期
許麗霞,施偉鋒,張威
?
電力系統(tǒng)穩(wěn)定器在船舶電力系統(tǒng)中的應用
許麗霞,施偉鋒,張威
(上海海事大學,上海 201306)
本文首先介紹了電力系統(tǒng)穩(wěn)定器(PSS)的原理;然后,結合所搭建的船舶電力系統(tǒng)(大功率柴油發(fā)電機組)數(shù)字仿真模型,研究PSS在船舶電力系統(tǒng)中的應用;最后,通過對船舶電力系統(tǒng)在有、無PSS作用下的典型故障工況的對比仿真與分析,說明PSS能夠有效提高船舶電力系統(tǒng)暫態(tài)穩(wěn)定性。
船舶電力系統(tǒng) 勵磁控制 電力系統(tǒng)穩(wěn)定器 暫態(tài)穩(wěn)定性 供電可靠性
0 引言
隨著船舶電力系統(tǒng)容量的不斷擴大,系統(tǒng)運行方式和負荷變化對系統(tǒng)阻尼特性的影響日益突出。電力系統(tǒng)阻尼特性的日益惡化,影響了系統(tǒng)暫態(tài)穩(wěn)定性和供電可靠性,而船舶電力系統(tǒng)作為一個獨立電力系統(tǒng),其運行環(huán)境決定了船舶必須盡可能保證持續(xù)穩(wěn)定供電[1]。電力系統(tǒng)穩(wěn)定器(PSS)是一種附加勵磁裝置,能夠補償發(fā)電機勵磁控制系統(tǒng)由于慣性產(chǎn)生的負阻尼,有效抑制系統(tǒng)低頻振蕩,是提高船舶電力系統(tǒng)暫態(tài)穩(wěn)定性的重要方法之一。因此,將電力系統(tǒng)穩(wěn)定器用于提高船舶電力系統(tǒng)暫態(tài)穩(wěn)定性具有很高的研究價值。
1 PSS原理
當電力系統(tǒng)受到干擾時,發(fā)電機轉子角出現(xiàn)振蕩,而電壓調節(jié)器及勵磁系統(tǒng)具有慣性,其提供的附加轉矩的相位落后于轉子振蕩的角度,它的一個分量與轉速反相位,導致轉子振蕩角度加大,引發(fā)系統(tǒng)振蕩[2],也就是低頻振蕩。
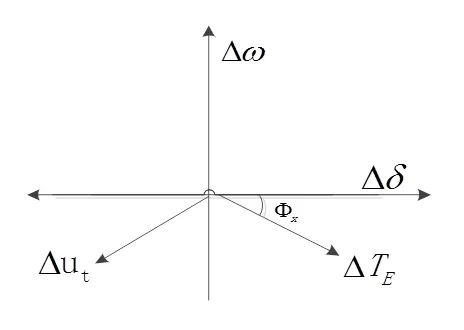
圖1 電壓調節(jié)器產(chǎn)生的負阻尼轉矩和電壓

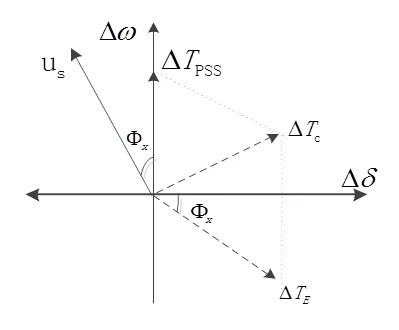
圖2 PSS產(chǎn)生的負阻尼轉矩和電壓
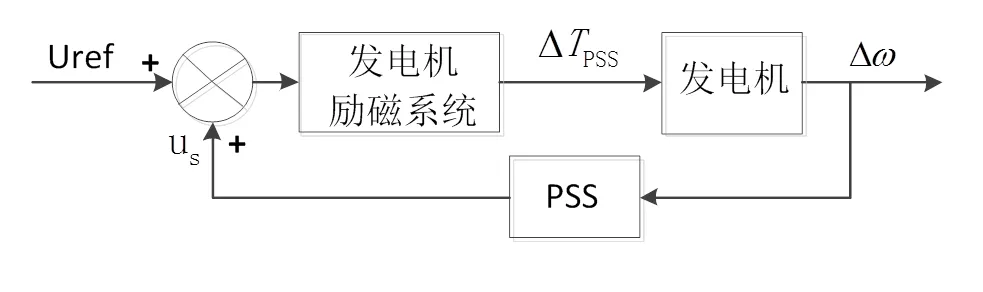
圖3 PSS控制系統(tǒng)結構圖
2 PSS結構及參數(shù)計算
2.1 PSS結構
現(xiàn)有的電力系統(tǒng)穩(wěn)定器有PSS1A、PSS2B、PSS3B、PSS4B。

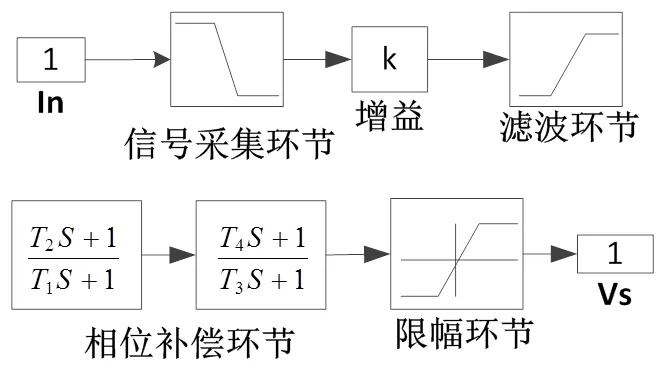
圖4 PSS1A結構圖
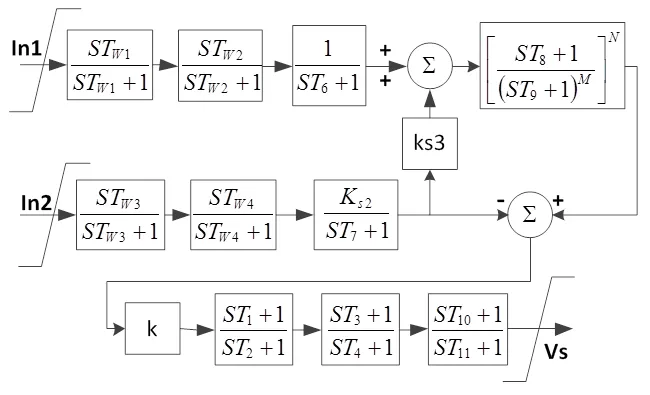
圖5 PSS2B結構圖
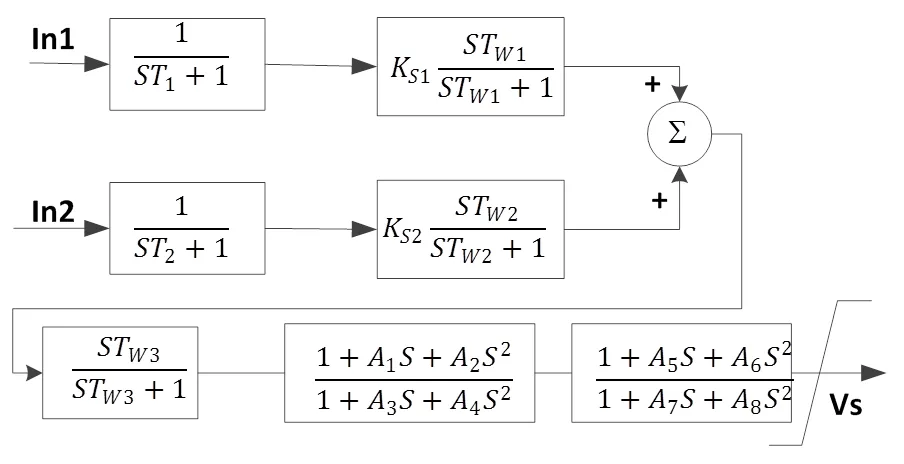
圖6 PSS3B結構圖

綜上所述,本文選擇PSS1A應用于船舶電力系統(tǒng)中。
2.2 PSS參數(shù)計算
電力系統(tǒng)穩(wěn)定器參數(shù)計算方法主要有相位補償法和特征根配置法兩種方法。相位補償法是建立在同步轉矩和阻尼轉矩的基礎上,根據(jù)發(fā)電機勵磁系統(tǒng)產(chǎn)生的負阻尼計算PSS增益環(huán)節(jié)和相位補償環(huán)節(jié)的參數(shù)。特征根配置法與相位補償法唯一不同之處在于:將發(fā)電機傳遞函數(shù)的特征方程分成實數(shù)部分和虛數(shù)部分,但是在計算過程中需先設定發(fā)電機時間常數(shù),且與發(fā)電機勵磁系統(tǒng)參數(shù)沒有直觀的聯(lián)系因此,因此,文章用相位補償法的計算PSS參數(shù)。
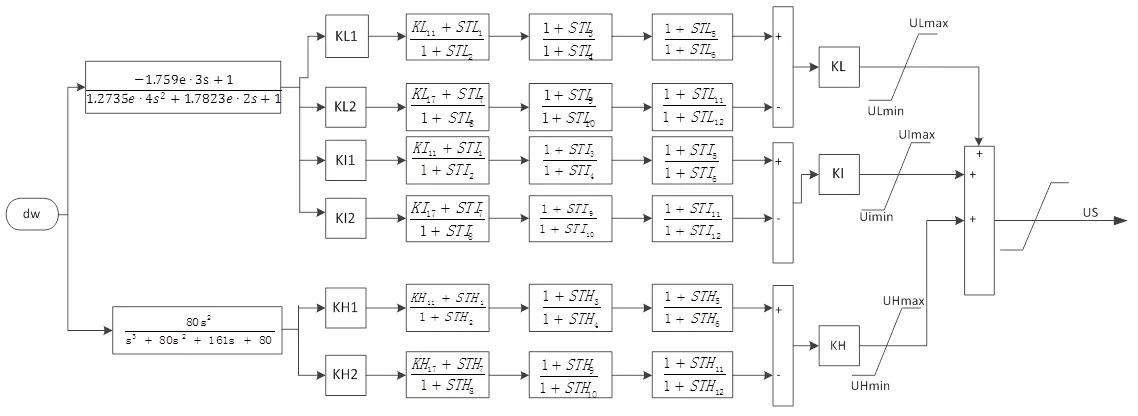
圖7 PSS4B結構圖
根據(jù)PSS的工作原理,PSS參數(shù)的整定與發(fā)電機及其勵磁系統(tǒng)密切相關,發(fā)電機和勵磁系統(tǒng)傳遞函數(shù)用表示,PSS傳遞函數(shù)用G(S)表示。通過對系統(tǒng)進行仿真,求取發(fā)電機及其勵磁系統(tǒng)脈沖響應曲線,結合最小二乘擬合方法,求得的等效表達式為:

加入PSS后,阻尼0增加到1,且自然振蕩頻率不變,則有:

根據(jù)PSS控制系統(tǒng)結構圖,可知:
將系統(tǒng)的阻尼提高到0.5,即1=0.5時,系統(tǒng)會有較理想的動態(tài)特性。將(1)、(2)及1帶入(3)式得:

實際工程中,運用PSS對電力系統(tǒng)進行控制時,在理論計算的基礎上,需經(jīng)過反復調試,才能得到較合適的PSS參數(shù)[6-8]。
3 船舶電力系統(tǒng)模型
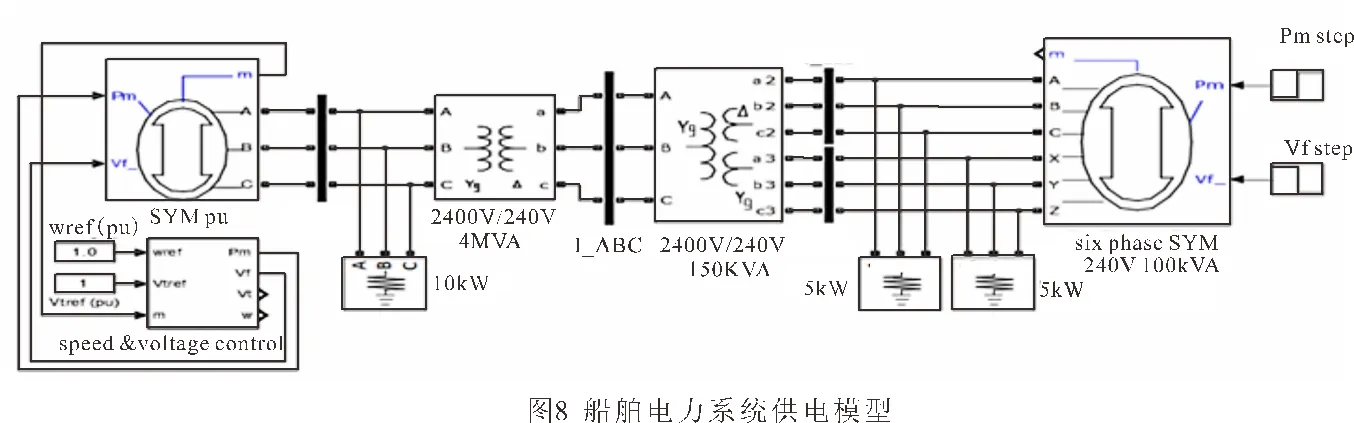
在SimPowerSystems環(huán)境中建立船舶電力系統(tǒng)供電模型,如圖8所示。主要模塊與參數(shù)有:

2)原動機及調速系統(tǒng):包括柴油機及其調速器模塊、電機信號分離模塊。
3)電動機為六相同步電動機:

4)變壓器:包括6相變壓器和3相變壓器。6相變壓器電壓等級240/240 V,3相變壓器電壓等級2400/240 V。
4 電力系統(tǒng)穩(wěn)定器在船舶電力系統(tǒng)中的應用
在無PSS控制、PSS控制工況下,分別對船舶電力系統(tǒng)進行兩相短路、重載過負荷仿真試驗。仿真運行結果分別如圖9、圖10。
兩相短路故障:系統(tǒng)設置4.0~4.8 s之間發(fā)生故障,故障地點為電動機定子側輸入端。
重載引起的過負荷故障:系統(tǒng)設置在4.0s發(fā)生故障。
根據(jù)圖9(a1)、(b1)和圖10(a2)、(b2)可知,與無PSS控制時相比,PSS對船舶電力系統(tǒng)的控制具有如下優(yōu)點:
1)PSS能在一定程度上提高系統(tǒng)暫態(tài)穩(wěn)定性,具體表現(xiàn)在:
對于電力系統(tǒng)重載過負荷故障:
無PSS控制時,發(fā)電機在4.0~5.0 s間發(fā)生3次較大振蕩;在6.0~8.0 s時發(fā)生3次較大振蕩;在9.0~10.0 s時,再次發(fā)生2次較大振蕩;電動機在4.0~5.0 s發(fā)生2次大的振蕩;在6.0~7.0 s之間發(fā)生3次較大振蕩;在9 s發(fā)生大的振蕩。
PSS控制時,發(fā)電機在4.0~5.0 s之間發(fā)生2次振蕩;電動機在7.0~8.0 s之間發(fā)生3次振蕩。
PSS控制電機轉速振蕩次數(shù)少于無PSS控制振蕩次數(shù),且系統(tǒng)由暫態(tài)至穩(wěn)態(tài)過渡時,曲線更平滑。
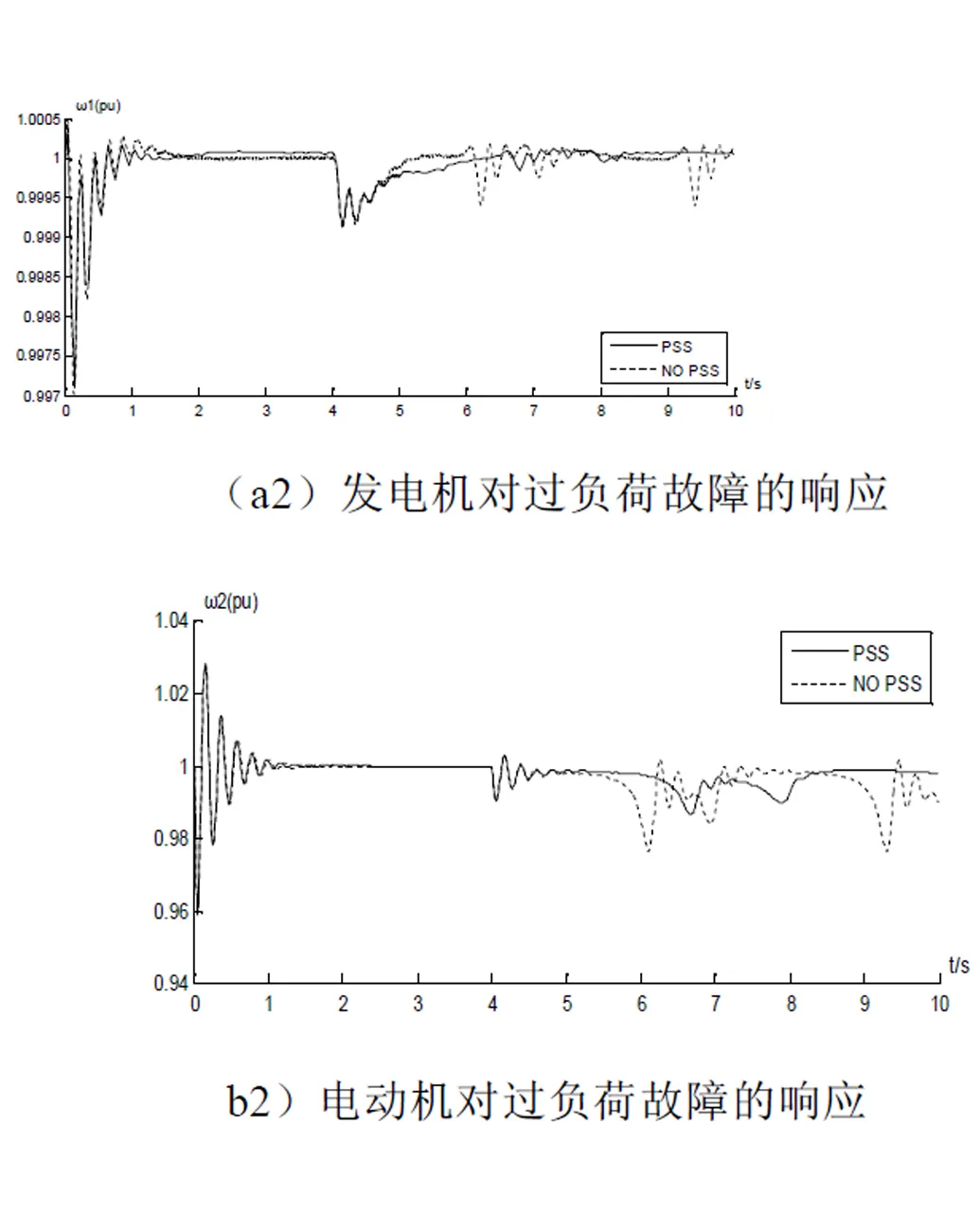
圖10 過負荷故障仿真結果圖
2)PSS能縮短電力系統(tǒng)由暫態(tài)至穩(wěn)態(tài)的過渡時間,提高系統(tǒng)的快速性。具體表現(xiàn)在:
對于電力系統(tǒng)兩相短路故障,無PSS控制時系統(tǒng)在4.0~10.0 s由暫態(tài)過渡到穩(wěn)態(tài),持續(xù)時間為6 s。PSS控制時系統(tǒng)在4.0~7.8 s由暫態(tài)過渡到穩(wěn)態(tài),持續(xù)時間為3.8 s。PSS比無PSS控制過渡時間縮短2.2 s。
對于重載過負荷故障,無PSS控制時系統(tǒng)可能失去穩(wěn)定。PSS控制時系統(tǒng)在4.0~8.2 s由暫態(tài)過渡到穩(wěn)態(tài),持續(xù)時間為4.2 s。PSS比無PSS控制過渡時間大大縮短。
但是PSS對船舶電力系統(tǒng)的控制仍然存在問題,主要表現(xiàn)在:
1)船舶電力系統(tǒng)在實際運行中,負荷變化量大,系統(tǒng)運行狀態(tài)發(fā)生變化時,通過仿真整定的PSS不能根據(jù)系統(tǒng)運行狀態(tài)進行合適的參數(shù)調整,自適應不夠。如系統(tǒng)重載過負荷時,系統(tǒng)暫態(tài)持續(xù)時間為4.2 s,持續(xù)時間較長。因此,不能對系統(tǒng)進行實時精確控制。
2)PSS對船舶電力系統(tǒng)進行控制時,控制精度不高,如系統(tǒng)重載過負荷時,電機振蕩幅度較大。
綜上所述,PSS為發(fā)電機勵磁控制系統(tǒng)提供附加勵磁,對抑制船舶電力系統(tǒng)低頻振蕩具有有效性,但還需要進一步的研究以提高PSS對船舶電力系統(tǒng)故障暫態(tài)過程的改善。
[1] 施偉鋒, 許曉彥. 船舶電力系統(tǒng)建模與控制[M]. 北京: 電子工業(yè)出版社, 2012.
[2] 劉取.電力系統(tǒng)穩(wěn)定器及發(fā)電機勵磁控制[M]. 北京:中國電力出版社, 2007.3.
[3] 霍承祥, 劉取, 劉增煌. 勵磁系統(tǒng)附加調差對發(fā)電機阻尼特性影響的機制分析及試驗[J]. 電網(wǎng)技術, 2011, 35(10): 59~63.
[4] 劉增煌. 同步電機勵磁控制的任務及其設計思想比較[J]. 電網(wǎng)技術, 1999, 22(8): 6~9.
[5] 湯凡, 劉天琪, 李興源.電力系統(tǒng)穩(wěn)定器及附加勵磁阻尼控制器對次同步諧振的影響[J]. 電網(wǎng)技術, 2010, 34(8): 37~40.
[6] 張軍政. 華潤電廠300 MW發(fā)電機組的電力系統(tǒng)穩(wěn)定器參數(shù)整定試驗[J]. 電網(wǎng)技術, 2005, 9(11), 73~76.
[7] 吳跨宇, 陳新琪. 運行工況對電力系統(tǒng)穩(wěn)定器PSS現(xiàn)場參數(shù)整定影響的研究[J]. 浙江電力, 2013, 3: 1~5.
[8] 吳志杰. 電力系統(tǒng)穩(wěn)定器PSS及整定實驗問題探析[J]. 中國電業(yè)(技術版), 2013, 7: 74~76.
Application of Power System Stabilizer to Ship Power System
Xu Lixia, Shi Weifeng, Zhang Wei
(Shanghai Maritime University, Shanghai 201306, China)
()
TM74
A
1003-4862(2014)12-0031-04
2014-05-19
高等學校博士學科點專項科研基金(20123121110003);上海市教委科研創(chuàng)新重點項目(12ZZ155)。
許麗霞(1988-),女,碩士生。研究方向:船舶電力系統(tǒng)。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
電力工程技術(2014年1期)2014-03-20 14:19:06