并聯機器人在任務空間的非線性自適應控制
2014-05-10 06:53:30陳奕梅
天津工業大學學報 2014年3期
陳奕梅,張 強
(天津工業大學電氣工程與自動化學院,天津 300387)
并聯機器人在任務空間的非線性自適應控制
陳奕梅,張 強
(天津工業大學電氣工程與自動化學院,天津 300387)
針對并聯機器人系統本身的結構特點,在任務空間提出了一種非線性自適應控制方案.與已有的自適應控制方案相比,由于充分考慮了慣性矩陣中參數的特點,在設計中不再采取模型的不確定參數線性化的變換,控制律及自適應律的設計也因被估參數的減少變得較為簡單.運用Lyapunov方法分析了系統穩定性并給出了系統穩定性條件.該方法能夠保證系統的終端位置及速度的全局漸近穩定.最后,仿真結果驗證了該方法的有效性.
自適應控制;非線性控制;并聯機器人;任務空間;Lyapunov函數
并聯機器人是由多條獨立的運動鏈連接末端執行器和固定系統而形成的多閉環機構.它具有剛度大、承載能力強、誤差小、精度高、自重負荷比小、動力性能好等一系列優點,成為一個潛在的高速、高精度的運動平臺.但由于并聯機器人動力學模型復雜,且存在著強非線性耦合,因此并聯機器人動力學建模、控制策略研究及其系統仿真是并聯機器人研究的最具挑戰性的領域之一,也是研究的難點之一.對于并聯機器人的控制可以分為運動學控制及動力學控制.運動學控制依靠機器的運動學關系,不考慮機器人的動力學特性,如PID控制、非線性PD控制[1]以及基于人工智能的控制方案[2],該控制算法較簡單、魯棒性強,但由于并聯機器人是一個非線性、強耦合系統,運動學控制在高度軌跡跟蹤時效果較差.動力學模型考慮了機器人的動力學特性,所以非線性動態可以得到很好的補償,在高速跟蹤時控制效果較好.Liu[3]提出了一種基于幾何映射的控制方法,尚偉偉[4]提出了增廣非線性PD控制和計算力矩非線性PD控制.為了進一步提高控制精度,Kim等[5]針對Stewart平臺提出了一種魯棒控制方案,Vivas等[6]為H4并聯機器人設計了一種預測控制器,張耀欣等[7]針對二自由度并聯機構設計了最優控制器.然而,在動態模型建立時,系統的動態參數很難準確確定,因此,設計自適應控制器對提高控制精度有著很大的意義.然而,由于并聯機器人本身模型的復雜性,自適應控制器的設計也較為困難,文獻[8-9]在關節空間設計了自適應控制器,但由于跟蹤軌跡都是在任務空間進行,需要求解運動學逆解,實現比較困難.文獻[10]針對二自由度冗余并聯機器人設計了任務空間的自適應控制器,較好地實現了機器人的自適應跟蹤.本文利用基于控制Lyapunov函數的自適應控制器設計方法[11],針對并聯機器人的任務空間設計了一種自適應控制器,該控制器在設計過程中通過對模型結構以及不確定參數特點進行分析,不再需要對模型進行參數線性化處理;同時,控制器以及自適應律由于被估參數量的減少,其結構也更加簡單.
1 機器人動力學模型
具有冗余驅動的并聯機器人在任務空間的結構如圖1所示.
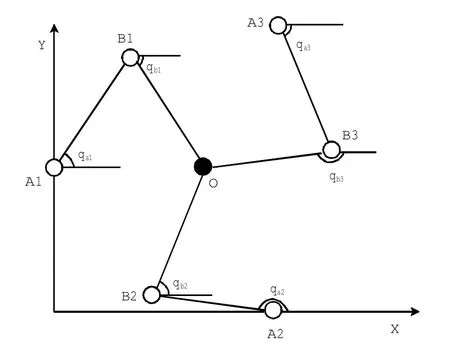
圖1 機器人任務空間結構圖Fig.1 Structure of parallel robot in task space
圖1中:機器人由位于A1、A2、A3的3個伺服電機驅動;qa1、qa2、qa3分別為3個主動關節的主動角;qb1、qb2、qb3分別為3個從動關節的從動角.此裝置包含了3個獨立的二自由度裝置,每個裝置具有如下動態方程:

式中:qi=[qaiqbi]T;Mi與Ci分別為每個獨立支路的慣性矩陣和離心力矩陣,表示為:
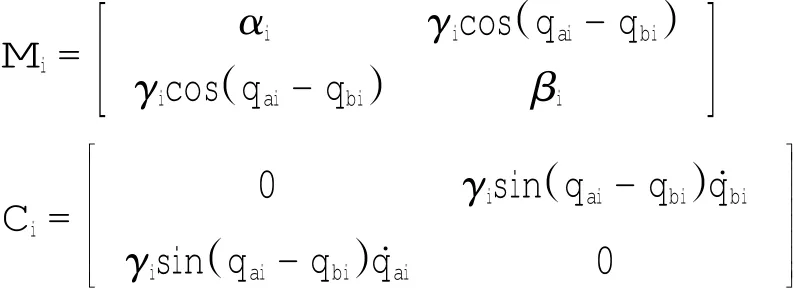
式中:Mi為正定矩陣;αi,βi,γi,i=1,2,3 為動態參數.這些參數由與系統的質量、質心、慣性等物理參數相關,并受測量精度的影響.τi= [τaiτbi]T為關節力矩向量,由于Bi為從動關節,因此τbi=0.fi=[faifbi]T為摩擦力矩向量,fai=sign(q˙ai)fci+fviq˙ai,與 fai相比,fbi非常小,可以被忽略.
并聯機器人的動態模型為3個獨立的串聯機構在一定約束下的組合,建立如下形式[10]:

式中:qe=(x y)T為終端位置坐標,記cabi=cos(qaiqbi),sabi=sin(qai-qbi)系統的慣性矩陣和離心力矩陣M與C分別表示為:

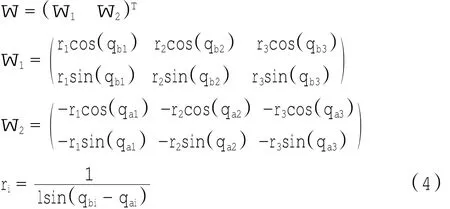
qe=(x y)T與節點關節角向量q=[qa1qa2qa3qb1qb2qb3]T之間滿足關系:

W為節點速度與終端速度之間的雅可比矩陣,雅可比矩陣W可表示為
由于τbi=0且fbi非常小可以被忽略,因此(2)可以進一步表示為:

S為終端速度與3個關節的雅各比矩陣,表示為:

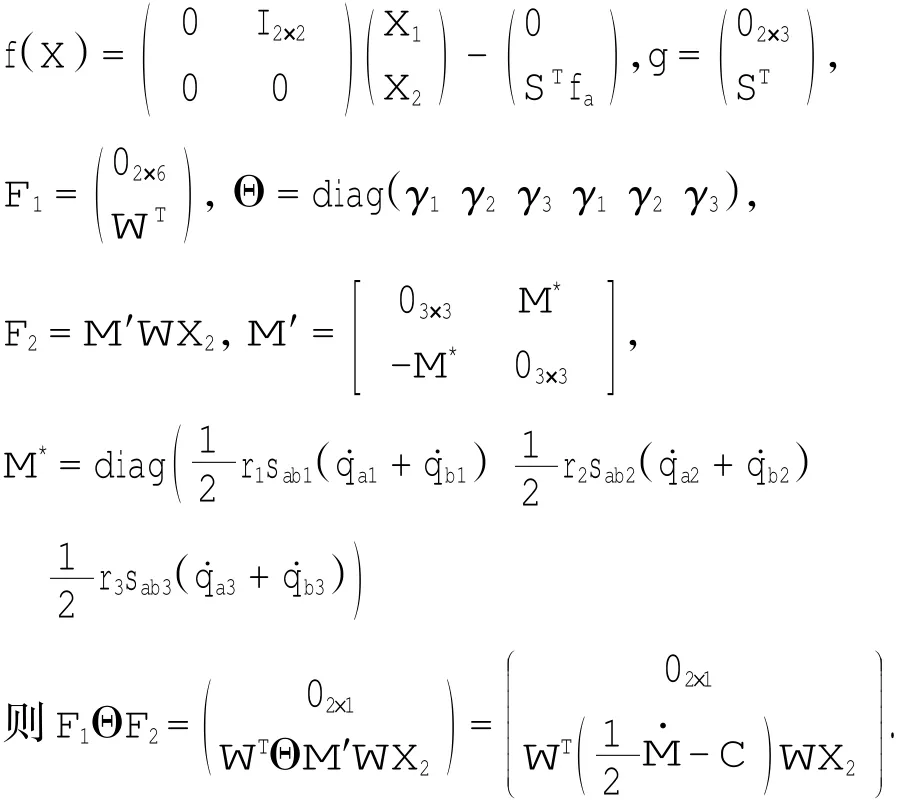
設 X1=qe,X2=,X=[X1TX2T]T,根據(5)式,建立并聯機器人的動力學模型如下:

2 自適應控制器的設計
記
構造f*=f+NX.其中,N為選定矩陣,滿足=-NX全局漸近穩定.取 gn=(I4×4F1),KΘ=,h=((f*)T)T,因此可以得到:


以及自適應律

證明:構造Lyapunov函數如下:

則U沿系統(6)的導數為:

(1)當X≠0,XTPg=0時,由式(9)、式(10)可得 τa=0.由假設條件 XTPg=0 ? XTPgnKΘh< 0,由于 XTPg不含有不確定參數γi(i=1,2,3)的任何信息,因此,KΘ中的不確定參數γi可取任意值.當取γi=?時,可得XTPg=0?XTPgnK(Θt)h<0,由此得到,當X≠0,XTPg=0 時,U˙< 0.
(2)當X≠0,XTPg≠0時,由控制律(9)、(10)得:


3 控制器參數的選擇

可以得到:
此時,定理1中的條件成立,控制器中的正定對稱陣P選定.從推導過程可以看出,該矩陣的選擇不唯一.
在控制器中,沒有關于對矩陣中參數αi以及βi的要求,事實上,對于 αi,βi,γi,i=1,2,3 參數的選擇,只要滿足Mi為正定,都能使系統實現平衡點的全局漸近穩定.
4 控制系統仿真
在仿真中,系統的參數選擇如下[10]:所有桿的長度都相等l=0.244m;3個固定端的位置分別為A1(0,0.25),A2(0.433,0),A3(0.433,0.5);(α1,α2,α3)=(0.093 2,0.042 7,0.042 7)(kg·m2);(β1,β2,β3)= (0.038 1,0.008 5,0.008 5)(kg·m2);(γ1,γ2,γ3)= (0.042 6,0.011 1,0.011 1)(kg·m2);(fv1,fv2,fv3)=(2.993 6,2.761 7,2.877 1)(NS);(fc1,fc2,fc3)=(0.497 6,0.457 0,0.300 6)(NS);初始角度為(qa1,qa2,qa3)=(54°,174°,-66°),(qb1,qb2,qb3)=(-18°,48°,-174°);末端的初始坐標為 (x,y)=(0.289,0.25),控制目標末端狀態為 X=((0.25,0.3,0,0)T;初始的參數估計為 ((0.005,0.005,0.005)(kg·m2).一般情況參數估計值的初值應選擇最小的估計值,這樣,可以確保 αi,βi,γi,i=1,2,3 使 Mi為正定成立.
圖2和圖3分別為目標位置及被估參數的仿真結果.
可以看出,盡管存在著不確定的參數值,但系統的目標位置仍然可以收斂到期望值,狀態是漸近穩定的.而參數估計值與實際值還略有不同程度的誤差,是Lyapunov意義下的穩定.
將本文的控制器與文獻[10]相比,控制器與自適應器的結構較為簡單,省略了復雜的參數線性化的處理過程,但如果對于參數αi,βi測量不準確時,缺乏一定的估計能力,因此,可在 αi,βi以及的初值的選擇上選擇一個保守的數值,即≤ αiβi,使 Mi為正定成立,以確保控制器的自適應穩定.
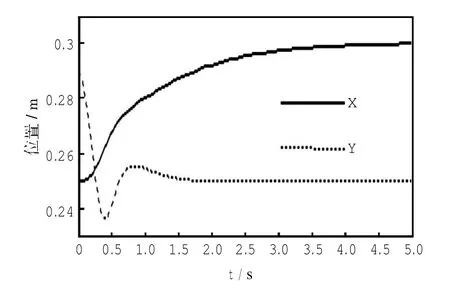
圖2 執行器末端位置仿真結果Fig.2 Simulation of end-effector position
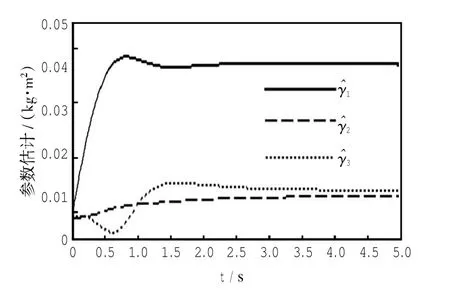
圖3 參數估計值仿真結果Fig.3 Simulation of estimated parameters
5 結論
利用基于控制Lyapunov函數的自適應控制器設計方法,針對并聯機器人的任務空間設計了一種自適應控制器,實現了系統狀態的全局漸近穩定以及被估參數的Lyapunov穩定.根據系統自身的特點,在未對不確定參數 αi,βi進行估計的情況下,只要 αi,βi以及的初值的選擇上選擇一個保守的數值,便可確保控制器的自適應穩定.
[1]SU Y X,DUAN B Y,ZHENG C H,et al.Disturbancerejection high-precision motion control of a Stewart platform[J].IEEE Trans Control Syst Technol,2004,12(3):364-374.
[2]LI Q,WU F X.Control performance improvement of a parallel robot via the design for control approach[J].Mechatronics,2004,14(8):947-964.
[3]LIU G F,LI Z X.A unified geometric approach to modeling and control of constrained mechanical systems[J].IEEE Trans Robot Autom,2002,18(4):574-587.
[4]尚偉偉.平面二自由度并聯機器人的控制策略及其性能研究[D].合肥:中國科學技術大學,2008.
[5]KIM H S,CHO Y M,LEE K I.Robust nonlinear task space control for 6-DOF parallel manipulator[J].Automatica,2005,41(9):1591-1600.
[6]VIVAS A,POIGNET P.Predictive functional control of a par原allel robot[J].Control Eng Pract,2005,13(7):863-874.
[7]張耀欣,從爽.平面二自由度冗余驅動并聯機構的最優運動控制及其仿真 [J].系統仿真學報,2005,17(10):2450-2454.
[8]HONEGGER M,CODOUREY A,BURDET E.Adaptive con原trol of the Hexaglide,a 6-DOF parallel manipulator[C]//Proc.IEEE Int Conf Robot Autom.NM:Albuquerque,1997:543-548.
[9]SIROUSPOUR M R,SALCUDEAN S E.Nonlinear control of hydraulic robots[J].IEEE Trans Robot Autom,2001,12(2):173-182.
[10]SHANG W W,CONG S.Nonlinear adaptive task space control for a 2-DOF redundantly actuated parallel manipulator[J].Nonlinear Dyn,2010,59(2):61-72.
[11]CHEN Y M.Direct adaptive control for nonlinear uncertain system based on control Lyapunov function[J].Journal of Sys原tems Engineering and Electronics,2006,17(3):619-623.
Nonlinear adaptive control scheme for parallel robot in task space
CHEN Yi-mei,ZHANG Qiang
(School of Electrical Engineering and Automation,Tianjin Polytechnic University,Tianjin 300387,China)
A new nonlinear adaptive control approach is proposed for a kind of parallel robot.In comparison with the existing adaptive control schemes,the parameterization expression of the model parameters is not needed in the proposed approach according to the properties of the parameters in the inertia matrix,and the adaptive control is simpler because of the reduce of estimated parameters.The stabilized conditions and corresponding proof are also presented,and the globally asymptotical stability of the end-effector position is guaranteed.Simulation results are demonstrated in support of the proposed control scheme.
adaptive control;nonlinear control;parallel robot;task space;Lyapunov function
TP271.72
A
1671-024X(2014)03-0055-04
2014-01-09 基金項目:天津市應用基礎及前沿技術研究計劃(11JCYBJC07000)
陳奕梅(1972—),女,博士,副教授.E-mail:chenyimei@tjpu.edu.cn
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
