基于物聯網技術的智能交通信號燈控制系統
2014-05-10 10:13:54李偉,門佳
溫州職業技術學院學報 2014年2期
關鍵詞:方向
李 偉,門 佳
(河南工業職業技術學院 計算機工程系,河南 南陽 473000)
0 引 言
隨著經濟增長,道路上行駛的車輛越來越多,而交通基礎設施建設相對滯后,道路交通擁堵問題愈發嚴重。城市治堵不能僅靠限購、限行、收費等行政干預手段,亟需一套行之有效的智能化交通管理系統。物聯網的興起給智能交通帶來了重大的發展機遇。
當前,大部分交通燈的信號周期和紅綠信號配時都是通過對該路口車流強度進行事先調查,采用統計的方法預先設定的。不管實際車流量如何,信號燈時間固定不變;小部分交通燈能根據簡單劃分的時段進行模式調整,但依然無法滿足根據車流強度實時調整信號燈的要求,從而導致交通阻塞。經研究發現,路口車流強度的變化是隨機和偶然的,這種變化很難建立準確的數學模型,因而提出一種能夠依據路口實時交通強度情況,自適應調節信號周期的智能交通信號燈控制系統十分必要。本文提出的自適應交通信號燈控制系統,以無線射頻識別(Radio Frequency Identification,即RFID)技術為基礎,以物聯網平臺為核心,實時準確地采集交叉路口待通過的車流量數據,依靠各種物聯網傳遞給監控節點,并以此作為調節交通信號燈的依據。
1 物聯網技術概述
1.1 物聯網技術
2010年物聯網被正式列為我國新興戰略性產業。溫家寶總理在《第十一屆全國人民代表大會第三次會議政府工作報告》[1]中明確提出“利用物聯網技術推動經濟發展方式的轉變”。物聯網是一個非常龐大的網絡,將各類數據采集裝置與計算機網絡聯合起來,進行數據通信,配以各類應用軟件,以實現身份識別、目標定位、信息跟蹤和監控管理。早期的物聯網是以物流監控系統為背景提出的,隨著技術的發展,物聯網范圍逐漸拓寬,目前主要應用于工農業檢測、消費類電子、智能化交通、智能化家居等領域。
物聯網有三個層次[2]:一是感知層,通過在各類物體上附著感應芯片使其具備可自動識別功能,利用無線射頻識別、二維碼識讀、GPS全球定位、各類傳感器等設備實時獲取物體的信息;二是網絡層,通過各類網絡(移動通信網絡、互聯網等)的融合,及時準確地將采集到的數據傳送出去,實現物與物之間的通信和信息共享;三是應用層,在多個應用領域(如綠色農業、遠程醫療、智能家居等)中,利用云計算、模糊控制、遺傳算法等各種技術,分析和處理數據,進行智能化控制。物聯網體系各層次構成如圖1所示。
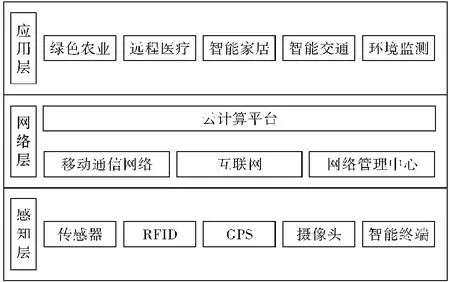
圖1 物聯網體系各層次構成
1.2 無線射頻識別
無線射頻識別(RFID)又稱為電子標簽技術,利用無線射頻方式通過電磁波在信號采集設備(閱讀器)與標簽之間實現非接觸雙向數據傳輸,達到身份識別和數據通信的目的。RFID技術具有精度高、壽命長、功耗小、可加密、容量大等優點,近年來已被引入智能交通領域,用于停車收費、門禁系統管理等方面。
RFID是一種精簡的無線信號收發系統,主要由附著在物體上的電子標簽、閱讀裝置、天線、RFID應用軟件等組成。每個電子標簽具有唯一的識別碼,被嵌入到物體上以標識身份。閱讀器發射特定頻率的無線電波,可激活處于其工作范圍內的電子標簽,將標簽內部的數據讀出,實現對物體的識別,應用系統根據需要對讀取到的數據進行處理[2]。RFID系統工作原理如圖2所示。
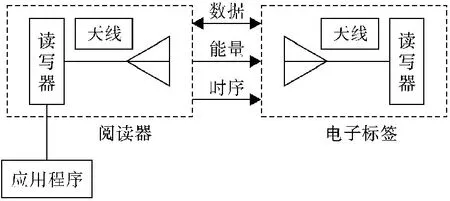
圖2 RFID系統工作原理
2 智能交通信號燈控制系統
2.1 設計目標
在交通路口紅綠燈前各方向車道安裝車流強度采集設備,該設備主要采用RFID技術工作。對通過的機動車安裝車載電子標簽,動態監控車流量。通過無線網絡,實現機動車輛、監控節點和控制中心之間相互交換信息。采用自適應算法,以各車道交通強度為依據,自動控制信號燈變換,減少車輛等待時間。
2.2 系統建模
城市中典型的交叉路口為雙向6車道,每個方向分別包含右轉、直行和左轉車道,在交叉路口設置紅、綠、黃三色信號燈。交通信號燈通常采用四相位[3]方式放行,其相位交替如圖3所示。第一相位允許東西方向車輛直行,第二相位允許東西方向車輛左轉,第三相位允許南北方向車輛直行,第四相位允許南北方向車輛左轉。四個相位順序切換,不斷循環,相位切換綠燈轉紅燈時采用短時(2~4s),黃燈進行預警和緩沖,右轉道車輛不與其他車流發生沖突,不統計其車流量。
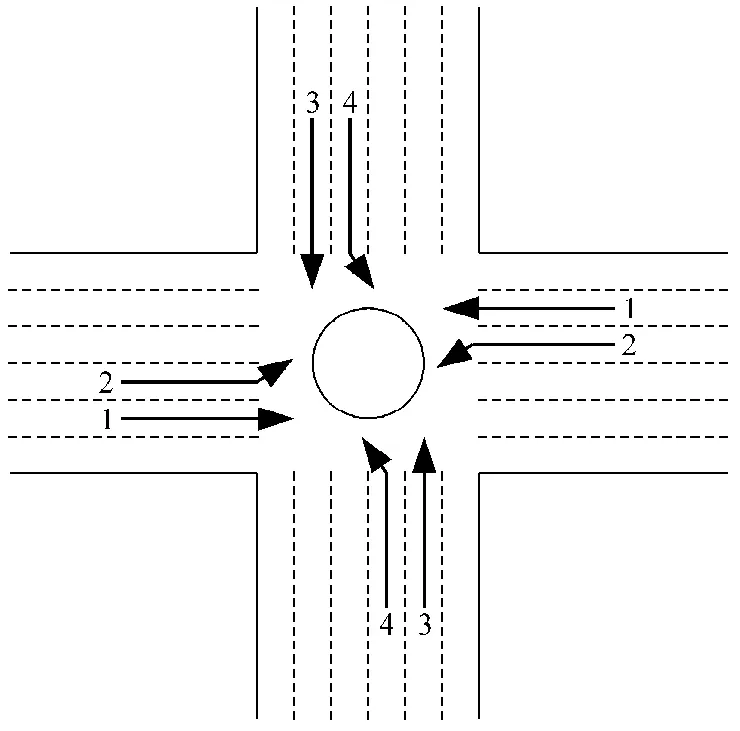
圖3 交通信號燈相位交替
2.3 車流量信息采集與統計
交通信號燈控制系統的核心是基于RFID技術的車流量數據采集設備。在交叉路口每個車道設立緩沖區,為一個先入先出的線性隊列,停車線前200m為緩沖區入口,停車線為緩沖區出口,該長度200m的隊列作為車流量數據采集區域。緩沖區入口和出口分別設置一個RFID閱讀器。入口RFID閱讀器執行通行車輛數加操作,即每通過一輛機動車,車輛數加一;出口RFID閱讀器執行通行車輛數減操作,即每通過一輛機動車,車輛數減一。任意時刻緩沖區數據即為該方向等待放行的車輛數。當某一相位綠燈亮之前,系統將待通過車輛數發送至控制節點,作為判斷當前交通強度和決定下一周期通行時間的依據。單路口交通車流量如圖4所示。
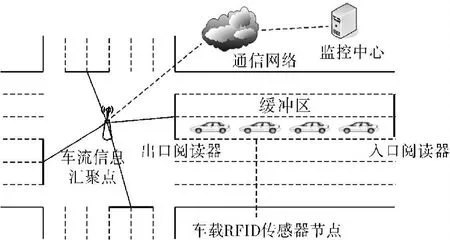
圖4 單路口交通車流量
當裝有RFID電子標簽的機動車駛入RFID閱讀器工作范圍內時,由RFID閱讀器發送給定頻率并加密電磁波信號。電子標簽通過內置天線接收能量和信號,相應工作單元被收到的能量激活,將電子標簽內的身份信息調制成相應頻率的射頻信號發射出去,從而將電子標簽本身攜帶的信息傳送到RFID閱讀器,RFID閱讀器接收數據并解碼,將提取的信息再傳送到后臺控制中心[2]。
2.4 交通信號燈智能控制算法
路口交通強度具有非線性、時變、多擾動、隨機和不確定性,不易確定數學模型,使得傳統的基于模型的控制理論與方法難于取得良好的控制效果[4]。以第一相位為例,說明交通信號燈智能控制算法。第一相位包含自東向西直行和自西向東直行兩個方向的交通,其他相位原理相同。
(1)設定相位一初始綠燈時長,該時長是系統中綠燈時長的最小值,應保證不會因為車流量過小而不給出通行時間。該數值依據實際情況設定,這里假設Tmin=30s。
(2)當第一相位即將由等待轉為通行時,統計其緩沖區內車輛數,車輛數小于20輛時,判斷該方向為少車;對面車道相位一等待車輛數也小于20輛時,判斷該方向也為少車,跳轉到步驟2。當自東向西或自西向東任意一個方向等待通過的車輛數達50輛時,判斷該狀態車輛較多,跳轉到步驟3。
(3)綠燈放行時間改為Tmax=60s,該時長是系統中綠燈時長的最大值,為避免該方向長時間占用通行權,使其他方向車輛的延誤時間增大,跳轉到步驟2。
2.5 設置監控中心
在交警部門的交通指揮中心設置大型機架式服務器,實現對交通信號燈的遠程控制。交通指揮中心擁有最高權限,可控制交通信號燈的工作模式,在現有方案和新方案之間切換,以保證升級到新方案之后系統的平穩過渡,不會出現繼承性問題。另外,本方案可配合現有的交通檢測手段(高清攝像頭、測速雷達、傳感器),通過有線或無線網絡,將采集到的車輛信息(車牌號碼、車輛類型、車輛所有者、車輛通過時間、車輛年檢情況等)發送給服務器存檔,為城市智能交通的其他領域如交通指揮調度、車輛交通信息統計、交通肇事追逃、交通信息誘導等提供原始數據信息。
3 仿真實驗
為驗證新方案的可行性,采用Matlab軟件進行仿真建模,路口車輛的到達服從Poisson分布。以平均車輛延誤時間作為指標衡量方案的優劣,平均車輛延誤時間為單位時段內到達路口的所有車輛的等待時間累加和與車輛數之比,表示為:

其中,N為每一相位兩個方向在綠燈時經過路口的車輛數之和,Ti-delay為每輛車的等待時間,測試計時為600s。為便于對比,在其他條件完全相同的情況下,分別對現有的固定信號方案和新方案進行仿真測試,將車流量情況分為高強度(30輛/min)、中等強度(20輛/min)和低強度(10輛/min)三種場景,分別進行多次仿真取平均值,結果見表1。

表1 各種車流量情況下平均車輛延誤時間及比較
由仿真實驗結果可知,當中低強度車流量時,新方案較之現有的固定信號方案有小幅改善;但當車流量較大時,新方案中平均車輛延誤時間有明顯的減小,優化效果顯著。可見,新方案適用于各種車流量情況下交通信號燈配時。
4 結 論
基于物聯網技術的智能交通信號燈控制系統,采用無線射頻識別技術,根據交通強度自動控制紅綠燈時長,增加了對各相位待通過車流量評估的模塊,自適應確定路口交通信號燈的時間,克服了人工經驗的缺陷,提高了交通道路利用率。該控制系統采用非接觸式檢測,不破壞路面、使用壽命長、成本較低且易于實現。該控制系統在單個路口的交通信號燈控制方案能有效實現的基礎上,可繼續研究開發,將其延伸到多個臨近交叉路口交通信號燈的協調聯動,協調區域內各交叉路口的交通信號配時及相位差,達到綠波帶[5]的效果。
[1]溫家寶.第十一屆全國人民代表大會第三次會議政府工作報告[EB/OL].(2010-03-15)[2014-01-05].http://www.gov.cn/2010lh/content_1555767.htm.
[2]孫其博,劉杰,黎羴,等.物聯網:概念、架構與關鍵技術研究綜述[J].北京郵電大學學報,2010,33(3):1-9.
[3]Jiang R,Wu Q S.The traffic flow controlled by the traffic lights in the speed gradient continuum model[J].Physica A:Statistical Mechanics and its Applications,2005,355(2/4):551-564.
[4]王東亮,萬幼川,王昆,等.一種基于交通燈調整和速度控制的交通方案[J].武漢理工大學學報:信息與管理工程版,2009,31(6):945-949.
[5]田豐,杜富瑞.基于WSN的智能交通燈控制系統設計[J].測控技術,2009,28(12):56-59.
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
