
基于模糊神經網絡靜止無功補償裝置模型的仿真分析
2014-05-16 09:09:16丁光彬朱宏鵬楊澤明蘇金彬
水電站機電技術 2014年2期
丁光彬,朱宏鵬,楊澤明,蘇金彬
(1.河北工程大學水電學院,河北 邯鄲 056021;2.天津水利電力機電研究所,天津 薊縣 301900;3.福建省龍巖市計量所,福建 龍巖 364400)
基于模糊神經網絡靜止無功補償裝置模型的仿真分析
丁光彬1,朱宏鵬1,楊澤明2,蘇金彬3
(1.河北工程大學水電學院,河北 邯鄲 056021;2.天津水利電力機電研究所,天津 薊縣 301900;3.福建省龍巖市計量所,福建 龍巖 364400)
電力行業的迅速發展使通過無功補償來降低輸電線電能損耗變得極為重要。我國現有大部分電氣設備負荷無功波動很大,嚴重影響系統功率因數,故對現有的靜止無功補償裝置(SVC)的工作特性,如實時性和穩定性等有了更高要求。本文從無功補償入手,通過對SVC工作特性的分析,利用MATLAB設計了基于自適應模糊神經網絡(ANFIS)的控制技術,系統仿真結果證明ANFIS控制算法比利用PI控制算法更加有優勢,提高了靜止無功補償裝置所要求的實時性,即進一步提高了無功控制的速度和穩定性。
電能損耗;模糊神經網絡;靜止無功補償
1 引言
電力工業是我國國民經濟重要的組成部分,而大部分電氣設備產生的大量的諧波和間諧波[1-3]嚴重影響了系統的功率因數和電能質量。要保障具有良好的電能質量,無功功率就務必保持平衡,通過無功補償裝置調節電網的無功,可以提高電力系統的電能輸送、改善輸電線路的運行質量。目前靜止無功補償裝置(SVC)得到了重要發展并逐步完善,被大量應用于降低輸電線路線損和遠距離送電的無功就地平衡,同時普遍應用于電力企業和用戶的無功補償。
當前,現有無功控制裝置主要有幾方面不足∶容易出現投切振蕩現象,投切策略不合理,結構形式不合理以及補償不連續、滯后等,由于工業現代化發展對電網質量要求的大大提高,無功補償裝置的實時性和穩定性更加需要完善和提高。
本文根據靜止無功補償裝置工作特性,應用模糊神經網絡對SVC模型進行搭建,相比較傳統的PI控制技術,采用MATLAB設計基于ANFIS的控制技術,利用系統仿真結果分析,得知ANFIS控制算法比利用PI控制算法更加有優勢,并且對于靜止無功補償裝置所要求的實時性和穩定性,更加有效。
2 SVC的ANFIS模型設計
本文利用在MATLAB/Simulink模糊邏輯工具箱(Fuzzy Logic Toolbox)中集成的基于Takagi-Sugeno型的自適應神經模糊推理系統模塊,搭建SVC的模糊神經網絡模型。
2.1 獲取數據樣本
SVC的核心部分就是控制系統設計,而傳統的采用PID、PI、PD等傳遞函數的算法固有缺點之一就是要采用硬件進行大量的計算,從而浪費了時間,降低了實時性,不能很好的跟蹤補償,有較長的延遲。根據文獻[6,9]可知,基于PI傳遞函數的算法優于PD、PID傳遞函數的算法,故本文先利用PI算法,根據文獻中的傳遞函數,利用MATLAB/Simulink進行建模、仿真,見圖1所示。
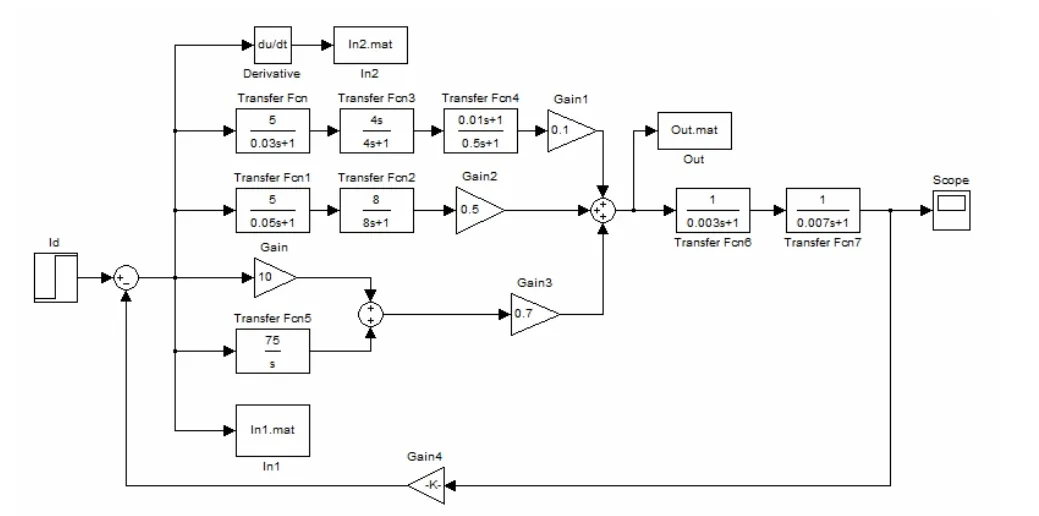
圖1 PI控制原理圖
利用圖1中的PI控制系統進行仿真,仿真時間為30s,獲得2859組輸入輸出數據樣本(In1、In2、Out)。設置好PI控制系統的各項參數,并進行仿真運行后,將In1、In2和PI控制器輸出Out及時間序列存入文件 In1.mat、In2.mat和 Out.mat。
2.2 數據篩選并模型初始化
在Matlab中,利用load命令將這三個輸出文件導入WorkSpace,然后將其間隔地分為兩組,一組為訓練數據,另一組為校驗數據,這兩組數據均為歸一化數據。通過對數據的篩選、分組等處理,轉載進WorkSpace后,最終使得圖形化的ANFIS模塊自動生成初始化的模糊邏輯系統。
2.3 模糊訓練
本次模型采用hybrid(缺省)混合法。誤差閾值(Error Tolerance)是用來作為停止訓練的判斷準則,假設為0。Epochs項是設定最大訓練次數,綜合考慮計算量和誤差范圍,設定最大訓練次數為60。
圖2是訓練誤差變化曲線。從圖2中可以看到訓練數據誤差呈一直減小的趨勢,減小到一定程度(40,1.5)時,曲線斜率減小,表明減小趨勢變緩。這表明誤差率一直逐漸減小,越來越接近現實的控制系統狀態。而且訓練數據和核對數據的重合度是相當高的,反映了訓練的結果是可靠的。圖2中“◆”曲線代表核對數據誤差,“*”曲線代表訓練數據誤差。
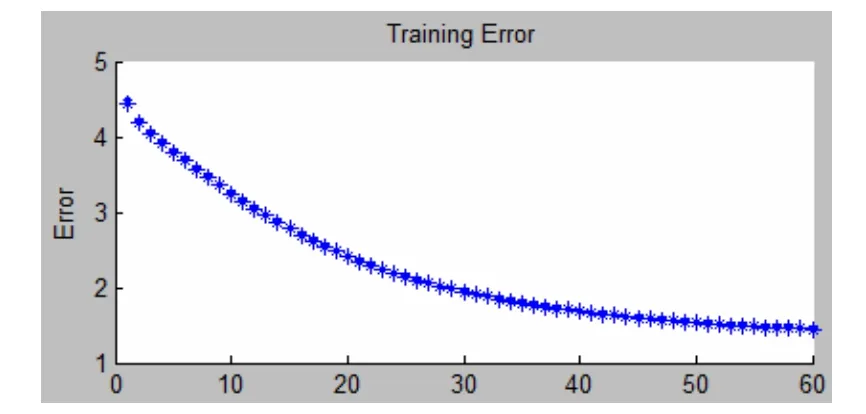
圖2 訓練誤差變化曲線
圖3是訓練數據與訓練結果對比圖,圖中“○”代表訓練數據曲線,“*”代表訓練結果曲線。從圖3中可以看出,訓練數據與訓練結果達到理想的匹配,其平均誤差約為8.7%。
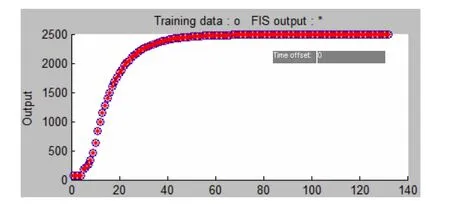
圖3 訓練數據與訓練結果對比
圖4是核對數據與訓練結果對比圖。從圖4中可以看出,核對數據與訓練結果達到了理想的匹配程度,其平均誤差約為5.2%。
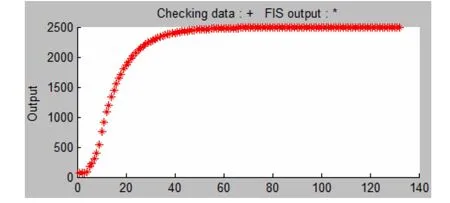
圖4 核對數據與訓練結果對比
根據上述步驟,從提取數據到模糊系統結構的建立,最后可以得到模糊控制系統在該PI傳遞函數下的輸入——輸出關系的一個曲面圖,如圖5所示。
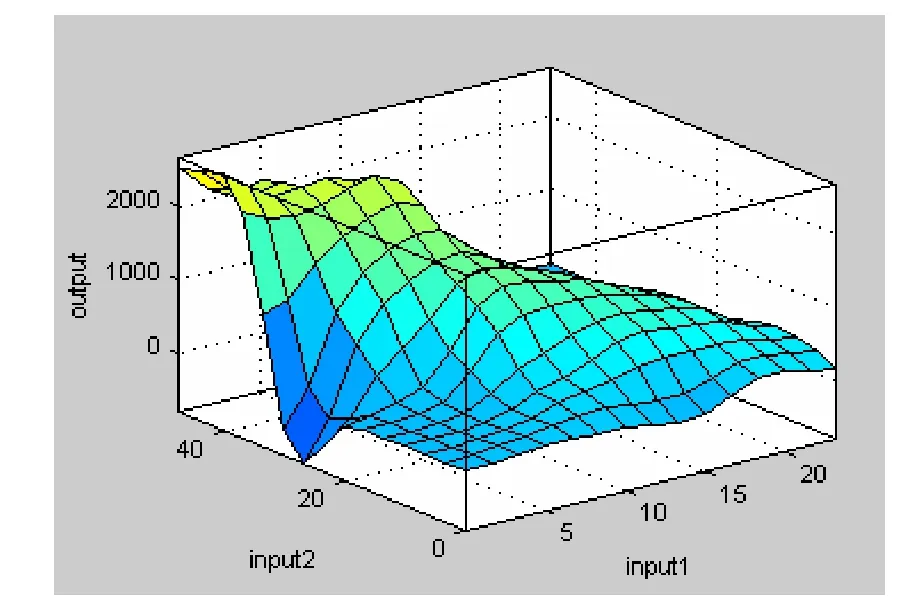
圖5 模型的輸入-輸出關系
2.4 系統仿真結果分析
首先用PI控制算法進行仿真,得到的仿真波形如圖6。
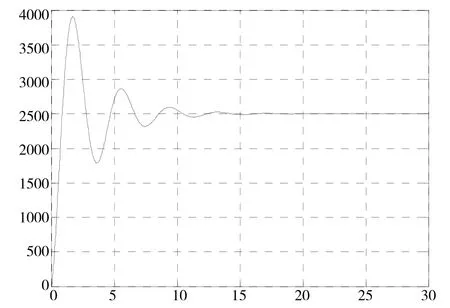
圖6 PI控制模型仿真波形
從圖6中可以看出,PI控制算法具有較大的超調量,然后系統輸出逐步振蕩穩定,直到18s左右,系統達到了一個穩定值2500。
然后用ANFIS模型替代PI控制算法,利用輸入信號和輸入信號的微分作為Fuzzy Logic Controller的輸入信號,建立ANFIS仿真模型,如圖7所示。根據這個仿真模型,設置好各項參數后進行仿真,得到在ANFIS模糊控制算法下的仿真波形如圖8。
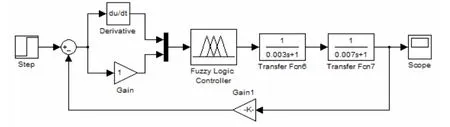
圖7 ANFIS仿真模型
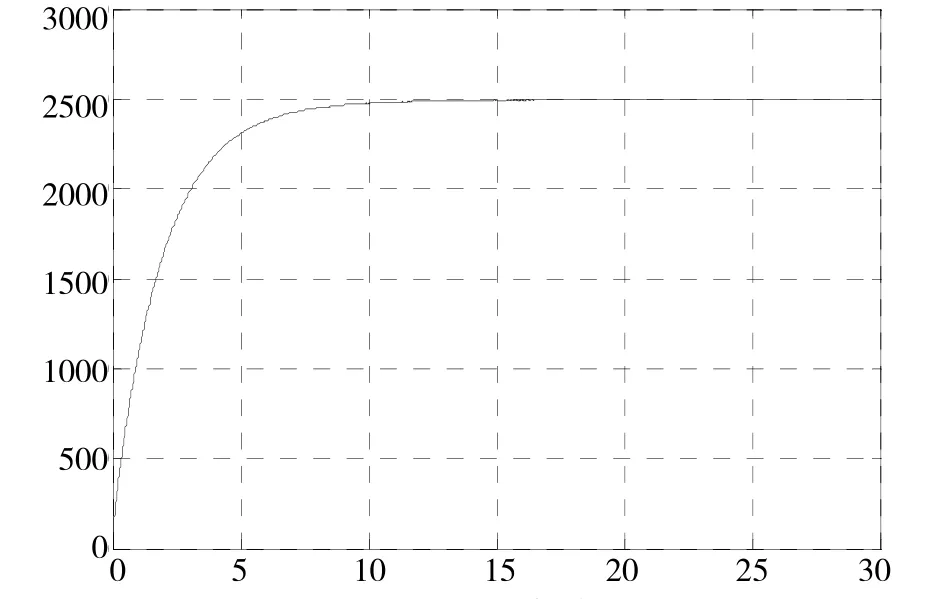
圖8 控制模型仿真波形
從圖8中可以看出,ANFIS控制算法是沒有超調量的,當系統中有輸入(檢測到的電壓值與給定值之間有偏差)時,信號輸出穩步增加,系統反應是很快的,沒有延遲的;隨著時間的增加,輸出不斷的增大,直到12s左右,系統達到了穩定值2500。
對比圖6和圖8,我們可以得出這樣的結論∶利用ANFIS控制算法比利用PI控制算法更加有優勢,具有更好的實時性,同時表明了上述建模的有效性。在本套SVC裝置的控制系統中,將利用ANFIS來構建控制器。
4 結論及展望
根據MATLAB軟件進行ANFIS控制系統的設計原理和步驟∶利用MATLAB/Simulink進行SVC數學建模,并從PI模型中獲取數據樣本,然后利用MATLAB將導出的數據進行數學處理,最終將其導入MATLAB的圖形化工具anfisedit中進行數據模糊訓練,從而獲得SVC基于anfis的控制模型。通過ANFIS建模,為靜止無功補償裝置控制系統的研制提供了新的控制算法,進一步提高了控制系統的有效性和實時性。
[1]A.R.Boynuegri,B.Vural,A.Tascikaraoglu,M.Uzunoglu,R.Yumurtac.Voltage regulation capability of a prototype Static VAr Compensator for wind applications[J].Applied Energy,2012,93:422-431.
[2]S.CALDERON-FERNANDEZ,M.HERNANDEZ-ANGELES,J.L.GUARDADO,and V.VENEGAS-REBOLLAR.A Control System for Static VAr Compensator Based on a Digitally Controlled Oscillator[J].Electric Power Components and Systems,2012.40:439-452.
[3]王兆安,楊 軍,劉進軍,等.諧波抑制和無功功率補償[M].北京:機械工業出版社,2005.
[4]施文沖.現代電力無功控制技術與設備[M].北京:中國電力出版社,2010.
[5]于 群,曹 娜.MATLAB/Simulink電力系統建模與仿真[M].北京:機械工業工業出版社,2011.
[6]張 皎,舞守遠,趙 剛,等.輸電系統靜止無功補償器的調節方法:中國,1766774[P].2005-09-13.
[7]吳曉莉,林哲輝,等.MATLAB輔助模糊系統設計[M].西安:西安電子科技大學出版社,2002.
[8]朱文俊,王紅斌,李峰.靜止無功補償器電壓調節器仿真與實驗研究[J].現代電子技術,2012,35(14).
[9]祎鄭群.基于瞬時無功功率理論的SVC系統研究與Matlab 仿真[J].電氣技術,2010(4):20-24.
[10]戴元海.基于模糊-PI控制的靜止無功補償器設計[D].長沙:湖南大學,2009.
TM743
A
1672-5387(2014)02-0018-03
2014-02-26
丁光彬(1964-),男,教授,研究方向∶水利水電工程智能信息處理。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
中等數學(2022年2期)2022-06-05 07:10:50
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
數學物理學報(2020年2期)2020-06-02 11:29:24
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
