一種基于多源信息融合的軸承監測系統研制
2014-05-23 04:16:20吳云鋒
中國修船 2014年6期
吳云鋒,劉 波
(91872部隊,山東 青島 266012)
準確檢測和診斷設備故障是設備維修效率和維修質量的基本保證。軸承是船舶上各類旋轉機械中最常用的通用零部件之一,也是船舶動力系統中最容易產生故障的部件,據統計旋轉機械的故障有30%是由軸承故障引起的。及早地發現軸承故障,并進行更換,可以有效防止故障進一步惡化。最原始的方法是將聽音棒 (或螺絲刀)接觸軸承座部位,靠聽覺來判定有無故障,固然練習有素的人能覺察到軸承剛發生的疲勞剝落與損傷部位,但受主觀因素的影響較大。隨著計算機技術的發展,旋轉機械在線監測與故障診斷系統在近幾十年來得到了日益廣泛的應用,世界各國競相開展研究工作,不斷推出新產品,已經有許多成功的在線監測與診斷系統。這些研究成果主要是通過外置傳感器檢測軸承的某一類狀態信息,并采用智能信息處理手段提取信號特征,建立該類信息與軸承典型故障間的映射模型,忽略了復雜系統故障間的耦合特性,本文所介紹的軸承故障監測系統,通過多個傳感器及信息采集裝置,將運行過程中軸承的溫度、轉速、電流、振動加速度、振動頻率,直觀地反映在PC機上,以便操作人員可以隨時分析判斷,通過實驗證明該監測系統有較高的準確性。
1 系統設計
基于多源信息融合的軸承故障監測系統是以構建信息融合的軸承故障監測和預報系統為總體目標,實現基于標準CAN總線的數據采集系統,揭示軸承故障與溫度、振動、轉速、電機電流、工況之間的映射模型,編制數據采集和軸承故障監測、預報軟件,實現關鍵故障的在線監測。
1.1 總體設計
系統包括軟件和硬件2大部分,硬件系統的結構如圖1所示,系統主要有各種傳感器 (電流傳感器、溫度傳感器、振動傳感器、轉速傳感器)、CAN總線數據采集電路板、CAN-232轉換器及臺式計算機組成。軟件包括運行在CAN總線數據采集電路板的數據采集程序和運行在臺式計算機上的上位機軟件。上位計算機與CAN總線之間通過CAN-232轉換器連接。CAN-232轉換器可以將CAN總線的數據轉換為串行通信數據。
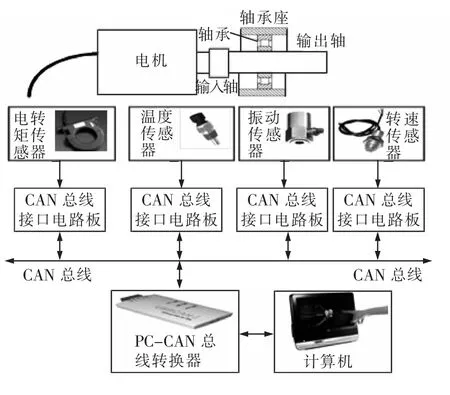
圖1 系統的硬件結構圖
1.2 上位機軟件設計
上位機軟件是指運行在PC端的軟件。上位機軟件通過RS232串口與CAN-232雙向轉換器連接,主要功能是按照串行通信協議,對接收到的數據進行解析,獲得各傳感器的測量值,并把這些測量值顯示在圖形用戶界面上,保存在數據庫中,以備后續查詢和利用。用戶及數據庫管理模塊功能是提供對數據和用戶的管理等操作;故障監測模塊是整個上位機軟件的核心部分,其功能是根據軸承當前的信號、信號特征及數據庫中的案例庫的案例,判斷當前軸承是否存在故障。
如圖2所示,上位機軟件包括串口通信模塊、數據解析接口模塊、數據采集模塊、顯示記錄模塊、用戶及數據庫管理模塊和故障監測模塊,各模塊功能如下。
串口通信模塊。串口通信模塊將從計算機串行口接收緩沖區中接收數據采集板發送的數據,并將數據采集板發送的數據保存在接收字符串中。
數據解析接口模塊:數據解析接口模塊將利用CRC16規則檢驗接收字符串是否正確,并按照與數據采集板約定的格式解析數據。
數據采集模塊。將解析后的數據分別保存在各變量中,得到測量數據。
顯示記錄模塊。將計算機采集的數據保存在數據中,并且以實時更新曲線的形式顯示在虛擬示波器中,以數字的形式顯示在虛擬的七段數碼管中。
故障監測模塊。對采集到的各種數據進行時域、頻域的處理,得到故障對應的特征,并基于故障案例庫預測或者監測軸承的故障。
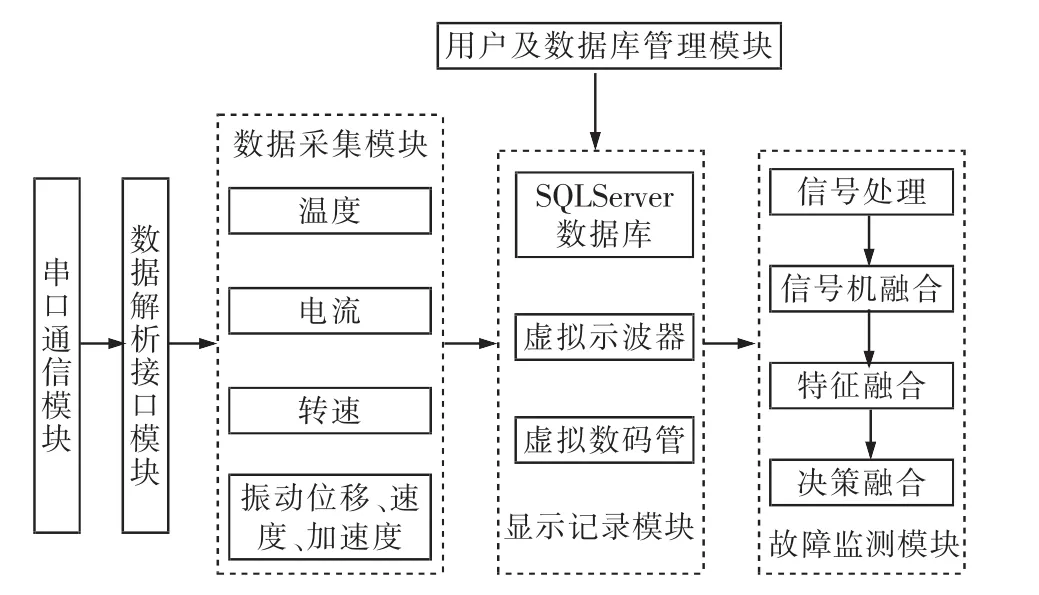
圖2 上位機軟件框架圖
圖3為軸承監測系統上位機軟件主程序流程圖,程序啟動后首先加載MFC框架,然后加載當前測試軸承參數,連接數據庫及串口,在此基礎上,程序進入數據采集及故障監測執行循環。在該循環中各種傳感器數據被實時采集、保存和處理。系統根據當前各傳感器的特征,進行數據級、特征級和決策級的融合,以實現故障的監測,其中在決策級融合中提出了基于案例相似性的故障監測方法。
1.3 下位機設計
下位機設計包括硬件和軟件2部分。其中的硬件設計方面選擇最新型的STM32F373VC型ARM處理器作為接口電路的處理器。STM32F373VC型ARM處理器內部帶有16位多路A/D轉換器和1-32倍的信號放大器,最高工作頻率為72MHz,具有較強的數據采集處理能力。根據軸承監測的結構特點,選擇合適的電流傳感器、轉速傳感器,確定各傳感器的安裝位置。將采集的信號分為2類:一類是模擬信號,本項目選擇4~20 ma電流輸出型傳感器,如電流傳感器、溫度傳感器,傳感器輸出的電流信號通過電流-電壓變化電路變換為3.3 V以內的電壓信號,傳輸給STM32F373VC型ARM處理器的A/D轉換器;另一類是脈沖信號,如霍爾式轉速傳感器,將該類脈沖信號接入STM32F373VC內部的基數器引腳,從而計算轉速。
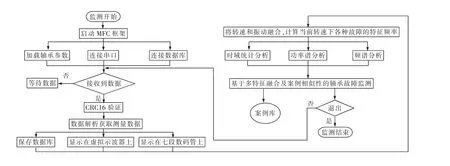
圖3 軸承監測系統上位機軟件的主程序流程圖
設計CAN轉換接口電路,選擇PCA82C250芯片作為CAN總線收發器 (STM32F373VC內部集成有CAN總線控制器),按照CAN總線協議在KEIL集成開發環境中編寫程序,將采集到的數據按照標準的Modbus協議發送到CAN總線式上,從而實現單點數據采集功能。下位機軟件運行在STM32F373型ARM處理器上,通過A/D轉換器、I/O口和485接口采集溫度、電流、轉速、振動等信息,并按照Modbus協議通過CAN總線接口發送到上位機。如圖4所示,該軟件使用STM32F373處理器提供的開發接口進行編程,設計A/D轉換接口程序、I/O口輸入及中斷計算程序、485驅動程序和CAN總線驅動程序。其中的CAN-232轉接口選擇商業標準化產品。
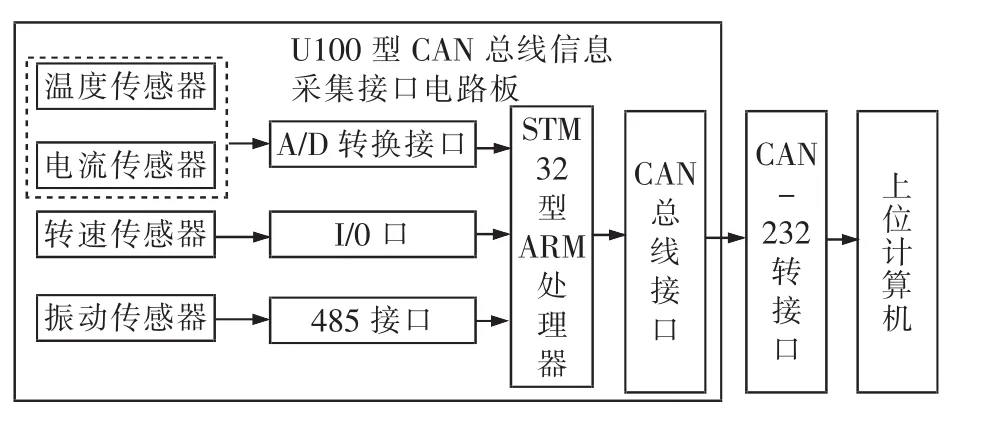
圖4 下位機軟件框架圖
圖5所示為下位機軟件主程序流程圖,上電以后,先是對ARM各外設進行初始化,硬件初始化完畢之后,開始CAN協議棧初始化,最后主程序進入一個無限循環。再循環中,首先等待CAN總線其它節點的消息,如果有新的消息,則校驗接收到的數據是否符合Modbus CRC16算法,若符合,則進行命令解析,以確定上位機查詢電壓、電流、溫度、轉速中的哪一項數據,隨后讀取相應A/D轉換器的數據,并按照Modbus格式生產和發送從機的反饋數據,從而完成一次主機查詢、從機反饋的通信過程。主程序隨后返回到等待其它節點的CAN消息。
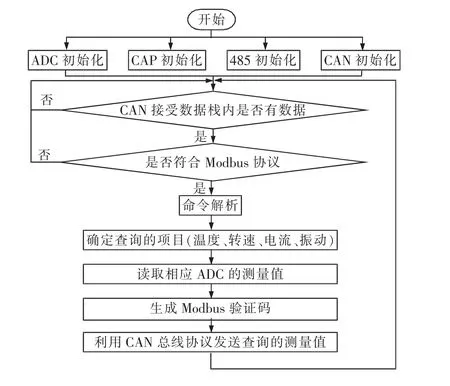
圖5 下位機軟件流程圖
2 測試及總結
2013年11月到2014年6月期間,項目組用激光焊接機對軸承進行了不同部位的破壞,模擬軸承故障,在實驗室內對該軸承故障監測系統進行了實驗。通過實驗驗證了基于信息融合的故障類型識別的可行性,故障識別率超過了90%,滿足設計指標。該成果能夠有效解決船舶軸承故障在線監測、故障診斷和壽命預測等問題,為船舶的穩定運行和“精確維修”提供技術支持和保障,同時為其它船舶設備的故障監測和預報系統研究提供參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50