電動閥門高靈敏度控制技術研究及其應用
2014-05-25 00:34:27艾昌文曹良坤
自動化儀表 2014年11期
艾昌文 曹良坤
(云南大學省電子計算中心1,云南 昆明 650223;云南省高校數(shù)字媒體技術重點實驗室2,云南 昆明 650223)
電動閥門高靈敏度控制技術研究及其應用
艾昌文1,2曹良坤1,2
(云南大學省電子計算中心1,云南 昆明 650223;云南省高校數(shù)字媒體技術重點實驗室2,云南 昆明 650223)
針對調節(jié)型電動閥門普遍使用的控制器,對其控制原理及存在的主要問題進行了研究和分析,提出了一種基于時間驅動的開度調節(jié)方法。該方法最大限度地提高了電動閥門的調節(jié)靈敏度,從根本上解決了閥門調節(jié)靈敏度與調節(jié)精度之間固有的矛盾,完全消除了閥門在使用過程中出現(xiàn)振蕩的可能性。基于該方法研制完成的電動閥門控制器得到實際應用,其可行性已得到充分驗證,控制效果與設計目標完全吻合。
電動閥門 控制器 振蕩 靈敏度 精度 pH控制
0 引言
電動閥門由閥門和電動執(zhí)行器組成,電動執(zhí)行器由電機、減速機構、限位機構、過力矩保護機構及位置反饋裝置等部件組成[1]。電動執(zhí)行器使用電能作為驅動力,控制閥門完成開關或調節(jié)動作,從而實現(xiàn)對管道介質進行開關或調節(jié)的目的。
電動閥門具有能源取用方便、信號傳輸速度快、傳輸距離遠、便于集中控制、靈敏度和精度較高、與電動調節(jié)儀表配合方便以及安裝接線簡單等優(yōu)點,因此被廣泛應用于電力、石油、化工、冶金、環(huán)保、輕工等行業(yè)的工業(yè)過程自動控制系統(tǒng)中。
針對閥門位置反饋信號進行閉環(huán)控制的開度調節(jié)方式得到了廣泛應用,但這種控制方式存在明顯不足,在一些應用領域不僅控制效果難以保證,而且由于控制波動大,容易造成資源浪費,增加生產(chǎn)成本。
1 問題描述
電機是電動閥門開度調節(jié)的動力裝置,在應用中有驅動用電機和控制用電機之分[2]。控制用電機有伺服電動機和步進電動機等類型。這類電機成本較高、控制接口相對復雜,對使用和維護有較高的要求。驅動用電機成本低,控制接口簡單,使用和維護非常方便,因此在實際應用中,以驅動用電機為動力的電動閥門占有很大比例。
電動閥門有不同的分類方式,如果按公稱通徑分類,公稱通徑≤40 mm的閥門屬于小通徑閥門,以驅動微電機為動力。與電動閥門配套使用的電動執(zhí)行器有不同的運行速度,全行程時間從5 s、10 s、15 s、30 s到60 s、100 s、120 s不等。該類閥門具有體積小、質量輕、連線簡單、調節(jié)精度較高等特點。
電動閥門控制器是上位控制系統(tǒng)與電動執(zhí)行器的接口單元,接收上位控制系統(tǒng)輸入的4~20 mA(1~5 V)或0~20 mA(0~5 V)等標準信號。該信號對應閥門從全關到全開的整個行程[3-4],具有開度調節(jié)功能的電動閥門使用電位器或標準電流信號作反饋,與可接收電位器反饋信號或標準電流信號的控制器配套使用。電動閥門控制器結構圖如圖1所示。
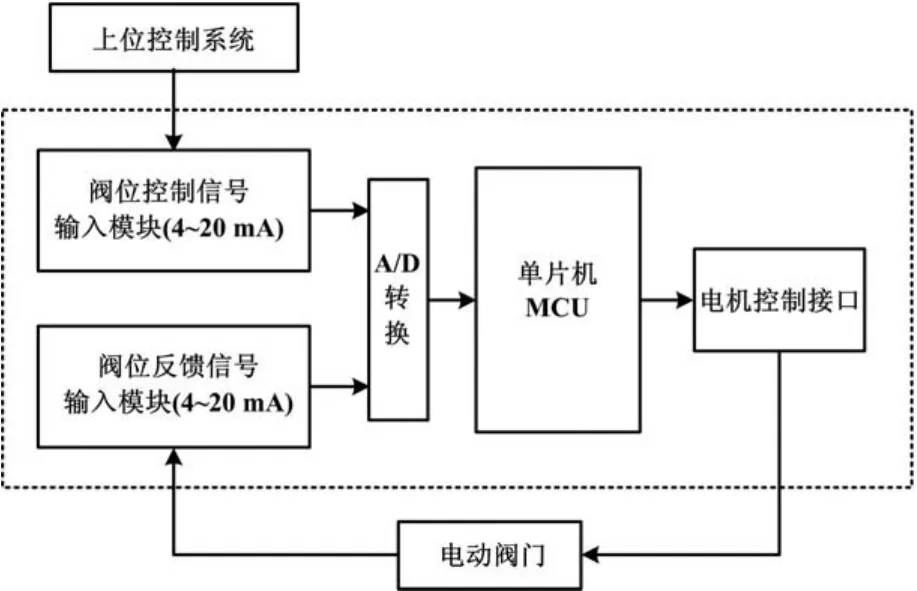
圖1 電動閥門控制器結構圖Fig.1 The structure of controller for electric valve
圖1中,虛線框內(nèi)為電動閥門控制器,硬件構造以單片機為控制核心,通過A/D轉換器采集上位控制系統(tǒng)輸入的閥門開度控制信號及閥門的位置反饋信號并進行相應比較。
當輸入信號大于反饋信號時,電機正轉,閥門開度增大;當輸入信號小于反饋信號時,電機反轉,閥門開度減小;當輸入信號與反饋信號相等時(或小于死區(qū)時),電機停止轉動[5]。
該類控制器采用的是對閥門位置進行閉環(huán)控制的工作方式。在閥門開度調節(jié)過程中,需要不斷對閥位反饋信號進行采樣,并與閥位控制信號進行比較,兩個信號容許的差值大小即為閥門的調節(jié)精度。
調節(jié)精度不能設置過高,否則一旦閥門在開關過程中因為機械慣性等原因出現(xiàn)過沖,很容易導致閥門產(chǎn)生振蕩[6-7]。
為了保證閥門開關的定位精度,需調節(jié)控制器的靈敏度范圍。靈敏度范圍小,定位精度高,但容易產(chǎn)生振蕩;靈敏度范圍大,不容易產(chǎn)生振蕩,但定位精度低。因此,現(xiàn)有的電動閥門控制器難以同時兼顧控制的靈敏度和定位精度。
2 電動閥門高靈敏度控制技術
2.1 控制器硬件構成
電動閥門高靈敏度控制器結構圖如圖2所示。單片機為控制器的核心部件,各功能模塊包括閥位控制信號輸入模塊、閥位反饋信號輸入模塊、存儲模塊、“WatchDog”模塊、LED/LCD顯示模塊、控制參數(shù)設置模塊、電機驅動模塊、閥位反饋信號輸出模塊[8]。閥位控制信號輸入模塊及閥位反饋信號輸出模塊用于和上位控制系統(tǒng)進行閥位信息交換;參數(shù)設置模塊用于完成電動閥門的全行程時間、電動閥門的最小動作時間(死區(qū))等主要控制參數(shù)的設置;電機驅動模塊實現(xiàn)單片機對電動閥門的開關控制,是電機的接口控制單元;存儲模塊用于保存控制器的運行參數(shù);“WatchDog”模塊實現(xiàn)控制器防死機功能;LCD顯示模塊用于顯示控制器的工作狀態(tài)。
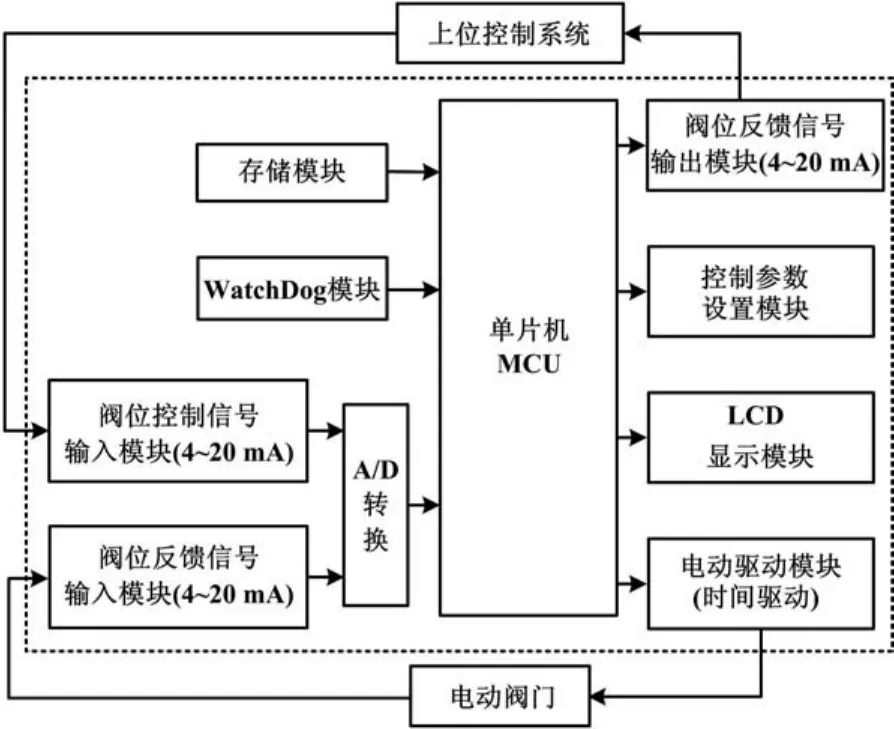
圖2 電動閥門高靈敏度控制器結構圖Fig.2 Structure of the highly sensitive controller for electric valve
2.2 具體實施方案
控制器接收上位控制系統(tǒng)(如PLC、DCS、計算機、智能儀表等)輸入的4~20 mA(1~5 V)或0~20 mA (0~5 V)等標準控制信號。該輸入信號對應閥門從全關到全開整個行程的相應位置。
在進行閥門開度調節(jié)時,控制器將本次輸入信號與上次輸入信號的增減量換算成電機通電時間的長短,通電時間一到立即切斷電機的供電電源,從而達到閥門開度調節(jié)的目的。控制器在閥門開度調節(jié)完成后,再采集閥門的位置反饋信號,并將該信號回傳給上位控制系統(tǒng),上位控制系統(tǒng)將該信號作為下一次閥門開度調節(jié)輸出信號的基準值。
在控制方式上,本控制器體現(xiàn)以下主要特點。
①控制器通過控制電機的通電時間來實現(xiàn)閥門的開度調節(jié)。在進行閥門的開度調節(jié)時,控制器將本次輸入信號與上次輸入信號的增減量換算成電機通電時間的長短,通電時間一到立即切斷電機的供電電源,從而達到閥門開度調節(jié)的目的。由于控制時間一到便切斷了電機的供電電源,所以從根本上消除了電動執(zhí)行器出現(xiàn)振蕩的可能性。
②控制器具有控制參數(shù)的設置功能。控制參數(shù)主要包括電動閥門的全行程時間、電動閥門的最小動作時間(死區(qū))。
由于可以通過控制參數(shù)設置模塊設置電動閥門的最小動作時間(死區(qū)),因此能最大限度地提高電動閥門的控制靈敏度。
③控制器在閥門開度的調節(jié)過程中,采用的是時間驅動的工作方式,對閥門位置采取開環(huán)控制。在進行閥門開度調節(jié)時,只要電機的通電時間未到,控制器并不采集閥門的位置反饋信號。只有在電機的通電時間到后,即本次閥門開度調節(jié)完成后,控制器再采集閥門的位置反饋信號,并將該信號回傳給上位控制系統(tǒng),上位控制系統(tǒng)將該信號作為下一次閥門開度調節(jié)輸出信號的基準值。
2.3 控制算法
以全行程時間為T1(s)的電動閥門為例,假設該電動閥門的最小動作時間設置為t,控制器接收上位控制系統(tǒng)輸入的4~20 mA(1~5 V)標準控制信號,并通過A/D轉換器實時采集該輸入信號。假設該信號的增量為ΔV(-4<ΔV<0或0<ΔV<4),則電機的通電時間為:

具體控制算法如下。
①當ΔV>0且T>t時,控制器控制電機正轉,通電時間:T=250×T1×|ΔV|;
②當ΔV>0且T≤t時,控制器控制電機正轉,通電時間:T=t;
③當ΔV<0且T>t時,控制器控制電機反轉,通電時間:T=250×T1×|ΔV|;
④當ΔV<0且T≤t時,控制器控制電機反轉,通電時間:T=t;
⑤通電時間T一到,即切斷電機的供電電源,控制器采集閥門的實際位置反饋信號,并將該信號回傳給上位控制系統(tǒng);
⑥上位控制系統(tǒng)將該閥門位置反饋信號作為閥門下一次開度調節(jié)輸出控制信號的基準值。
3 應用案例
基于時間驅動控制方式研制完成的電動閥門控制器在污水處理等領域得到實際應用,污水排放過程中對pH值有明確的控制指標要求,污水達標排放pH值范圍一般不低于6或高于9。因此,在污水排放過程中必須對其pH值進行有效測量和控制。
為保證測量精度,pH傳感器選用復合型玻璃電極,酸性(或堿性)添加劑的流量調節(jié)裝置采用小通徑電動球閥,電動閥門控制器置于污水處理現(xiàn)場,中心控制室的計算機系統(tǒng)通過RS-485接口與其連接。電動閥門高靈敏度控制器應用于pH值測控的系統(tǒng)結構圖如圖3所示。
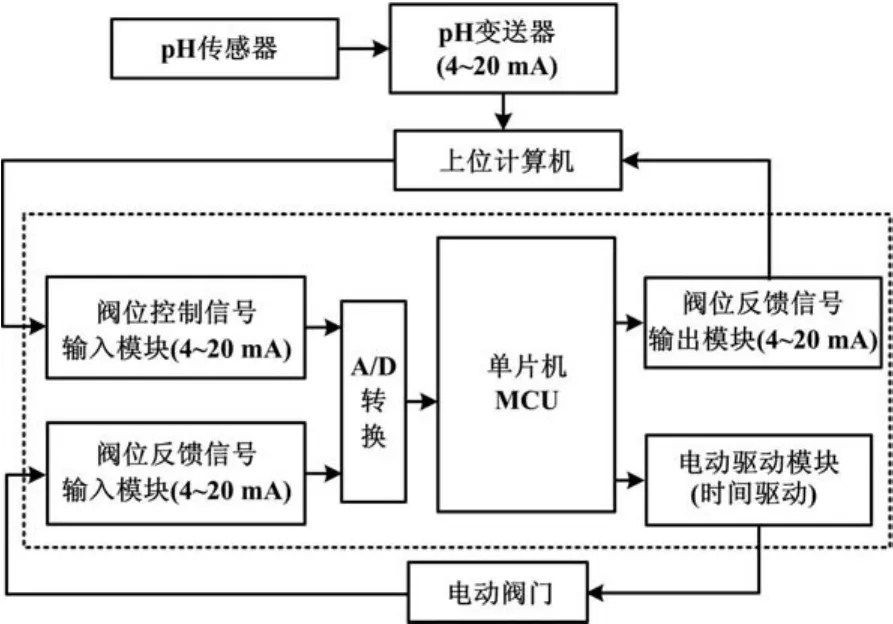
圖3 系統(tǒng)結構圖Fig.3 Structure of the system
圖3中,虛線部分為電動閥門控制器。
為實現(xiàn)對電動閥門的高靈敏度控制,在硬件系統(tǒng)設計完成的基礎上,控制軟件的設計非常關鍵和重要,必須與硬件系統(tǒng)緊密配合才能達到滿意的控制效果。在控制算法的設計上,通過采用粗調與精調相結合的控制方式提高系統(tǒng)運行的性能指標。當pH檢測值與pH設定值有偏差較大時,通過增大比例因子實現(xiàn)快速調節(jié),縮短系統(tǒng)的穩(wěn)定時間;當pH檢測值接近pH設定值時,通過減小比例因子直至按最小時間步長進行調節(jié),使被控pH值最大限度接近pH設定值,并最終趨于穩(wěn)定[9-10]。
綜合上述可知,pH精調范圍“pH設定值±ε”可以根據(jù)現(xiàn)場情況進行靈活設置。根據(jù)經(jīng)驗,ε值設置在0.5~1.0 pH比較合適。電動閥門高靈敏度控制器應用于污水處理pH調節(jié)的控制模擬曲線如圖4所示。
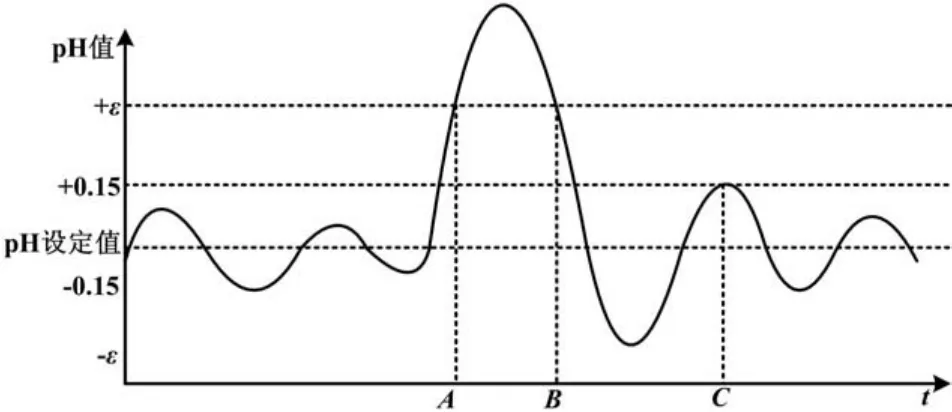
圖4 pH控制模擬曲線Fig.4 Emulated curve of pH control
圖4中,AB時間段為粗調區(qū)間,BC時間段為精調區(qū)間。實際應用中,pH值的控制過程與模擬控制曲線是完全吻合的,實際控制范圍可以達到“pH設定值±0.15pH”。
4 結束語
以驅動電機為動力的電動閥門在工業(yè)領域得到廣泛應用,在對相關技術長期研究與應用的基礎上,從技術原理、硬件構成及控制算法等方面論述了一種基于時間驅動的閥門開度控制方法。依此方法設計完成的電動閥門控制器在pH值測控系統(tǒng)中發(fā)揮了很好的作用,并取得了與設計目標完全吻合的控制效果。電動閥門高靈敏度控制技術使調節(jié)型電動閥門的關鍵技術指標得到明顯提高,具有可以預見的實用價值和應用前景。
[1] 王志,王勇,謝玉東.新型電動調節(jié)閥的驅動與控制系統(tǒng)[J].機床與液壓,2013,41(10):12-14.
[2] 李發(fā)海,王巖.電機與拖動基礎[M].北京:清華大學出版社,2012.
[3] 梅魁.電動執(zhí)行器的原理簡介與發(fā)展趨勢展望[J].科技資訊, 2013(18):134-135.
[4] 周律,嚴懷鈺,宋韞崢,等.PLC及觸摸屏在電動閥開度控制中的應用[J].儀表技術與傳感器,2012(2):53-54.
[5] 胡開明,葛遠香,王懷平.電動閥門智能控制器的設計[J].儀表技術與傳感器,2012(12):15-17.
[6] 楊超,劉利.電動調節(jié)閥開度控制的研究與實現(xiàn)[J].機電工程, 2007,24(2):55-58.
[7] 楊永強,田華安,孫建華.船用電動調節(jié)閥運行中的常見故障分析[J].艦船科學技術,2011,33(1):82-84.
[8] 馮先成.單片機應用系統(tǒng)設計[M].北京:北京航空航天大學出版社,2009.
[9] 曹良坤,艾昌文,楊艷華,等.pH過程仿人智能測控算法研究[J].昆明理工大學學報:自然科學版,2013,38(4):39-43.
[10] 王樹東,高學洪,宋國輝,等.城市污水處理中pH預測控制系統(tǒng)的應用研究[J].電氣自動化,2012,34(1):37-39.
Research and Application of the Control Technology with High Sensitivity for Electric Valve
The control principle and major problems of commonly used controller for regulating type of electric valves are researched and analyzed.The time driven method for regulating the opening of the valve is proposed.This method maximizes the regulating sensitivity of the electric valve,thus the inherent contradictory between the regulating sensitivity and the regulating accuracy of the electric valve is solved fundamentally;and the possibility of appearing oscillation in operation of valve is completely eliminated.The controller for electric valve designed based on this method is putting into practical application,its feasibility has been fully verified,the control results entirely consistent with the design goal.
Electric valve Controller Oscillation Sensitivity Accuracy pH control
TP214
A
修改稿收到日期:2014-02-24
艾昌文(1963-),男,1983年畢業(yè)于電子科技大學計算機工程專業(yè),獲學士學位,高級工程師;主要從事自動化技術及計算機應用技術方面的研究。
猜你喜歡
流程工業(yè)(2022年3期)2022-06-23 09:41:08
中國石油石化(2021年8期)2021-07-20 07:36:12
煤氣與熱力(2021年3期)2021-06-09 06:16:18
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
智富時代(2018年5期)2018-07-18 17:52:04
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中學科技(2014年11期)2014-12-25 07:38:53