高速接觸網導高偏差對弓網動態性能的影響
2014-05-28 11:05:22關金發吳積欽張家瑋
電氣化鐵道 2014年6期
關金發,吳積欽,鐘 源,張家瑋
0 引言
接觸線高度(下文簡稱導高)是指軌道平面與接觸線下表面的垂直距離,是表征接觸網重要的靜態幾何參數之一。導高偏差是指實際導高偏離接觸網設計導高的差值,把實際導高比標稱導高大的偏差稱作負弛度,反之稱作正弛度。幾乎所有接觸網機械結構均影響導高,如:基礎、支柱、支持結構、定位結構、補償結構、接觸懸掛等,一旦其中一個或多個結構改變,最終均反映在導高上,引起導高偏差。
弓網動態性能的好壞取決于接觸網與受電弓2個振動子系統的機械結構,接觸網是受電弓的滑道,滑道的平順性是保障良好弓網受流的前提,而滑道的平順性主要取決于接觸網靜態幾何參數,包括:接觸線高度、接觸線拉出值、接觸線坡度等。高速鐵路接觸網對導高偏差的要求尤其苛刻。
文獻[1~5]討論了接觸網幾何參數偏差產生的 原因及提出減少偏差的措施。文獻[6~10]討論了弓網動態仿真模型的建立方法。文獻[11]討論了雙弓對弓網動態性能的影響。文獻[12,13]利用弓網仿真手段,優化了錨段關節的接觸網模型。文獻[14]結合現場安裝的弓網監測設備,研究了接觸網導高、弓網燃弧與弓網接觸力的關系,得到弓網接觸力幅度與接觸線高度之間有一定的數量關系,以及驗證了弓網接觸力能同步反映出弓網離線的規律。文獻[15]利用仿真手段,分析了吊弦缺失引起的接觸網靜態幾何參數偏差對弓網動態性能的影響,并通過小波變化識別接觸力缺失的波形,得出吊弦缺失與弓網動態接觸力之間的關系。
綜上所述,大部分文獻研究的是如何減少接觸網幾何偏差,如何建立弓網模型進行弓網仿真,如何根據現場實測數據確認弓網仿真,但較少進一步闡述接觸網的靜態幾何參數偏差對弓網動態性能的影響。本文研究導高偏差對弓網動態性能的變化規律,以吊弦長度、定位點高度變化為變量,對比不同參數下的弓網動態性能,得出導高偏差的最大合理取值,為接觸網結構優化和接觸線高度維修調整提供理論依據。
1 引起接觸線高度變化的因素
接觸線高度變化指的是接觸線實際值與標準值的差值,可分為隨機偏差、系統偏差、粗放偏差。在接觸網施工、運營、維護過程中,由于零部件的安裝調整不當,以及裝置結構變形等都會使接觸網靜態幾何參數出現與設計方案不同的偏差,這些因素反映到接觸線的空間位置上,使接觸線高度和橫向偏移出現偏差,可能影響導高的原因有:張力補償器誤差過大;支持結構變形過大;結構部件與吊弦等產生松、斷、脫;施工預配偏差過大;施工安裝偏差過大;接觸線磨耗過大;附加負載過大;軌道垂直不平順過大。
吊弦對接觸網靜態形狀的影響尤為重要,實際上由于現場安裝或運行條件等多種原因,吊弦的長度總是與接觸網設計值存在一定的偏差,而且不僅僅是單根吊弦出現偏差,很有可能全部吊弦高度均有偏差。
定位點的高度變化是影響接觸線高度的關鍵因素之一,在速度大于250 km/h 等級時,標準要求兩定位點的偏差為0,即不產生坡度,但在實際施工中很難保證,誤差的產生是必然的。
2 弓網動態性能評價及弓網模型建立
弓網仿真的關鍵是得到弓網接觸力,而其評價標準可根據EN50119:2001、EN50367:2006 和UIC799:2002,具體參數如下:
(1)平均接觸力目標值(Ft):
Ft= 0.000 9 v2+ 70;
(2)最大標準差(σmax):σmax<0.3Ft;
(3)最大允許動態接觸力(Fmax):
Fmax= Fm+ 3σ<350 N(速度大于230 km/h);
(4)最小允許動態接觸力(Fmin):
Fmin= Fm- 3σ>0;
(5)實際接觸力范圍:0<F<350 N;
(6)定位點最大抬升量(dup):dup≤120 mm;
(7)受電弓最大垂向運動幅度(Δz):Δz≤ 80 mm;
(8)允許實際燃弧率(NQ):NQ≤0.2%。
接觸網的核心部分是接觸懸掛,在考慮建立接觸網有限元模型前,首先假設支柱、支持裝置是完全固定的,即忽略支柱、支持裝置對接觸網的影響。只研究定位裝置、接觸懸掛的有限元模型。
由于接觸線和承力索的抗拉強度很小,索與梁單元的波動傳播速度相當,基于以上考慮本文接觸線、承力索單元均采用索單元。吊弦由于弓網接觸力的作用會產生拉緊和松弛2 種狀態,需要利用一個變剛度非線性單元。接觸線、承力索、吊弦、定位點均采用一致質量單元。
通過坐標轉換,把單元局部坐標系轉換成整體絕對坐標系,組合單元質量矩陣與剛度矩陣形成接觸網整體有限元模型:

外力矩陣[Fca]考慮總的外載荷,每個時間步時間積分是均重新評估。假設t + Δt 時刻外力矩陣為

其中矩陣[G]、[N]分別為施加于接觸網的重力和張力,這2 個外部載荷并不隨時間改變,是一個常量。矩陣[Fc]為弓網接觸力,其作用在接觸線上的位置是隨時間改變的。
受電弓一般使用集中質量模型,可分為兩質量塊、三質量塊、多質量塊模型。以兩質量塊模型作為分析對象,受電弓的動力學方程見式(3),可記為式(4)。

式中,fc為弓網接觸力,N;f0為抬升力,N;kc為弓網接觸剛度,N/m。

弓網相互作用關鍵是解決弓網接觸問題,實際上弓網是一個滑動接觸,在滑動的過程中伴隨著離線的可能,利用Newmark-β 積分法,把時間離散成一個一個時間步,所以受電弓也可等效為一個時間步內向前移動一定距離,受電弓的移動速度與時間步的大小有關。
一般解決接觸問題的方法是利用罰函數,令接觸線單元i-j 與質量點m3的垂直方向位移為Δk,假設質量點m3在單元i-j 上方位移Δk 為正值,此時為接觸滲透狀態,反之質量點m3在單元i-j 下方位移Δk 為負值,見圖1。
根據每個時間步Δk 的符號判斷受電弓與接觸線的接觸狀態,再根據接觸剛度與Δk 的乘積作為分別作用于接觸線和受電弓弓頭質點的接觸力,重新計算下一時間步接觸網和受電弓的外部載荷產生的位移,如此反復,即可計算弓網相互作用。接觸力計算公式為

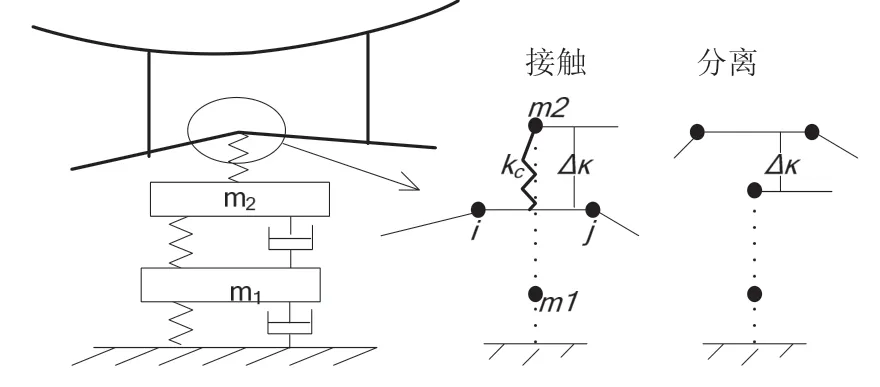
圖1 弓網相互作用模型示意圖
聯合式(1)、式(4),列寫統一的弓網動力學方程:

使用Newmark-β 積分算法求解式(6)。這里不詳細推導,可參考有關數值積分方法的書籍。
研究對象為EN50318 中提供的弓網模型,利用上述討論得到的弓網動態性能參數見表1,對照標準驗證模型的正確性。

表1 弓網動態互相作用參數表
3 吊弦長度變化引起導高偏差
吊弦長度變化會使導高產生正負弛度偏差,下面研究單根吊弦引起導高正負弛度偏差對弓網動態性能的影響。
假設離跨中附近選擇1 根吊弦,減少該吊弦長度,使接觸線出現12、11、10、9、8 mm 的負弛度,其接觸線靜態平衡形狀見圖2。
利用第2 節方法進行弓網動態仿真,運行速度為300 km/h。由于接觸線只在一點出現負弛度,受電弓在通過該點后,經過一定緩沖時間就能再次達到正常的運行軌跡,在接觸力的統計區間,應選擇受電弓弓頭偏移正常軌跡的一段進行分析,見圖3。

圖2 單根吊弦負弛度接觸線靜態形狀曲線圖

圖3 單根吊弦負弛度受電弓通過前后運行軌跡曲線圖
從圖3中可以找出受電弓偏離標準接觸網的大致區間,選擇該區間為受電弓運行時間[3.024 s,3.34 s]內經過的接觸網區域作為弓網接觸力的統計區域。由于受電弓的運行速度為300 km/h,即統計的接觸力區域為[257 m,278 m],20 m 的接觸網區段。經過20 Hz 低通濾波后的接觸力波形見圖4,接觸力統計值見表2。

圖4 單根吊弦負弛度分析區段弓網接觸力波形圖
觀察表2中12、11、10 mm 偏差的最小允許動態接觸力均小于0,即這3 種情況不滿足弓網動態要求,而且隨著負弛度偏差的增加,弓網接觸力標準差也在不斷增加,說明弓網接觸力的波動越來越劇烈,當出現單根吊弦長度減少時,接觸線的最大負弛度不應超過9 mm。
接觸線存在正弛度現象,就像平直的路中出現了“凸起”一樣,當受電弓通過該處時會造成弓頭抬升突然減小,增加接觸網與受電弓的振動,下文分析單根吊弦出現正弛度情況時,弓網動態性能的改變情況。
假設離跨中附近選擇一根吊弦,增加該吊弦長度,使接觸線出現14、12、10、8 mm 的正弛度,其接觸線靜態平衡形狀見圖5。

表2 單根吊弦負弛度分析區段弓網接觸力統計值表

圖5 單根吊弦正弛度接觸線靜態形狀圖
利用第2 節方法進行弓網動態仿真,運行速度為300 km/h,受電弓的運行軌跡見圖6。分析區域與導高負弛度相同。經過20 Hz 低通濾波后的接觸力波形見圖7,接觸力統計值見表3。
觀察表3中14 mm 偏差的最小允許動態接觸力小于0,12 mm 偏差的最小允許動態接觸力接近0,即說明這2 種情況不滿足弓網動態要求,而且隨著正弛度偏差的增加,弓網接觸力標準差也在不斷增加,說明弓網接觸力的波動越來越劇烈。綜合以上分析,得出當出現單根吊弦長度增加時,接觸線的最大正弛度不應超過12 mm。

圖6 單根吊弦正弛度受電弓運行軌跡圖

圖7 單根吊弦正弛度分析區段弓網接觸力波形圖

表3 單根吊弦正弛度分析區段弓網接觸力統計值表
4 定位點高度變化引起導高偏差
定位點高度受支持裝置、定位裝置、拉出值、第一吊弦位置及長度等影響,相鄰定位點高度差與跨距之比為接觸線坡度,標準中規定當速度大于250 km/h 時,接觸線坡度的設計值為0,
定位點高度變化是影響接觸網相鄰定位點坡度的主要參數之一,相鄰定位點坡度的定義為2 個定位點的高度差比跨距長度,若相鄰定位點的相對標稱接觸線高度差±5、±15、±20、±30 mm 為研究對象,其相對的定位點坡度分別為0.17‰、0.5‰、0.67‰、1‰,具體接觸線導高見圖8。受電弓運行軌跡見圖9。
從圖9可以看出,隨著坡度的增加,受電弓偏離標準受電弓運行軌跡的趨勢更明顯,受電弓的垂向運行幅度在不斷增大。對比圖8、圖9,把受電弓運行時間換算成對應公里標,發現當受電弓通過接觸線標稱高度時,所有工況的受電弓運行軌跡從聚合到一點到再次分離。接觸力統計區域見圖9中分析區段1、2。由于分離方向的不同,有些受電弓運行軌跡往上移,有些受電弓運行軌跡往下移,故分別選擇兩個區域。接觸力統計值見表4和表5。

圖8 同定位點高度的接觸線靜態形狀圖
從表5發現在定位點高度變化在±30 mm 的情況最小允許動態接觸力小于0,說明該工況的弓網動態性能不符合標準,故定位點的最大偏差不應大于±20 mm,即坡度小于0.67‰。

表4 分析區域1 弓網接觸力統計值表

表5 分析區域2 弓網接觸力統計值
5 結論
接觸網導高偏差的產生是不可避免的,影響導高偏差的主要原因有吊弦長度和定位點高度變化。
單根吊弦的高度變化不足以影響相鄰定位點的抬升,但是隨著負弛度或正弛度偏差的增加,弓網接觸力標準差不斷增加,表示弓網接觸力的波動越來越劇烈,通過仿真分析得出:300 km/h 運行速度下,當接觸線出現單根吊弦負弛度時,最大偏差不應超過9 mm;當接觸線出現單根吊弦正弛度時,最大偏差不應超過12 mm。
定位點的坡度越大,相鄰定位點的抬升差值越大,通過對仿真結果分析得出:300 km/h 運行速度下,定位點的最大偏差不應大于±20 mm,即坡度小于0.67‰。
以上得到的接觸網導高偏差的合理限值,為接觸網導高驗收和導高維修提供參考依據。
[1]陶立新.德國高速鐵路接觸網的施工允許偏差[J].電氣化鐵道,2000,(3):27-29.
[2]程德勤.接觸線高度標準體系中的偏差技術[A].中國電氣化鐵路兩萬公里學術會議論文集[C].2005:109-114.
[3]楊湘民.淺談接觸網施工誤差的控制方法[J].電氣化鐵道,2004,(1):15-17.
[4]張建紅.控制接觸網施工誤差的方法探討[J].科技與企業,2012,(23):188.
[5]羅忠.淺談接觸網施工誤差的控制方法[J].西鐵科技,2007,(S1):50-52.
[6]蔡成標,翟婉明.高速鐵路受電弓-接觸網系統動態性能仿真研究[J].鐵道學報,1997,(5):38-43.
[7]周寧,張衛華.基于直接積分法的弓網耦合系統動態性能仿真分析[J].中國鐵道科學,2008,(6):71-76.
[8]張衛華,曹新文.高速受電弓-接觸網系統的動力學研究[J].西南交通大學學報,1991,(1):105-111.
[9]吳燕.高速受電弓-接觸網動態性能及主動控制策略的研究[D].北京:北京交通大學,2011.
[10]趙飛.基于有限元的高速弓網系統動態性能仿真及分析[D].成都:西南交通大學電氣工程學院,2012.
[11]吳燕.高速受電弓-接觸網動態受流性能及雙弓距離的研究[J].鐵道學報,2010,(4):38-43.
[12]Jesus Benet.A Mathematical Model of the Pantograph- Catenary Dynamic Interaction with Several Contact Wires[J].International Journal of Applied Mathematics, 37:2.
[13]Jesus Benet.A mathematical study of the pantograph/ catenary dynamic interaction on transition spans[J].Proceedings of the World Congress on Engineering 2007 Vol II.
[14]Shunichi KUSUMI.Diagnosis of Overhead Contact Line based on Contact Force[J].Qr of RTRI, Vol.47.NO,1.
[15]A.Bobillot.Pantograph-Catenary three paths to knowledge[J].UIC 2006 第7 屆世界鐵道大會會議論文.