一種適用于疲勞駕駛員的行車防追尾 報警模型
2014-05-28 10:46:30王紅蕾
電氣技術 2014年11期
張 路 王紅蕾
(貴州大學電氣工程學院 貴陽 550025)
隨著我國經濟發展與改革開放的力度日益增大,我國的交通運輸業的規模也愈發龐大。但是隨之而來的交通事故發生率也不斷增長,給從事交通運輸業司機的人身安全帶來很大威脅。據相關部門統計資料顯示,每年導致交通事故發生最重要的原因之一就是疲勞駕駛。尤其在高速路上,由于疲勞引起的交通事故占總事故的40%以上,其中追尾事故是最為常見的[1-2]。所以有必要針對從事長時間不間斷駕駛的這一部分疲勞人群開發一種防撞報警系統,此系統會自行判斷前方是否存在追尾的危險,如果存在危險此系統會發出聲光報警,以及自動制動措施以保護駕駛員的安全。此系統的最關鍵之處在于防撞報警模型的設計,因為這是軟件基礎。本文在參考眾多的國內外資料的基礎上,嘗試著建立一種適合疲勞駕駛員的防撞報警模型,此模型以汽車行駛過程中的制動過程為基礎,并以速度及駕駛員的反應時間為主要參數。其中疲勞駕駛員的制動反應時間國內外還沒有系統的進行研究與測試,所以本文更多的是提出一種測量方法來試著填補這項空白并且需要后期采樣以進一步測試。
1 汽車的制動過程
建立防撞報警模型其目的就是計算出汽車在不同的行駛狀態下的制動距離。了解汽車的制動過程對建立制動距離的公式是很有必要的。汽車的制動過程是建立防撞報警模型的理論依據,可分為以下四個階段。
1)駕駛員反應階段,此階段包括駕駛員在感知前方危險并作出判斷,然后采取相應的制動措施,并且把右腳從加速踏板移動到制動踏板上的反應時間,此時間記為t2。對于疲勞駕駛員來說,此反應時間的確定是非常復雜的,影響其反應時間的因素是疲勞程度,駕駛員的年齡等等。并且國內外針對其研究很少,所以本文只能提出一種測試方法且在后期選擇被試者來進一步測試。
2)制動器協調階段,此階段是指駕駛員踩下制動踏板距離制動器起作用的時間。此時間記為t2。
3)汽車減速時的加速度增長階段,此階段是指汽車減速時其加速度從零持續增長到恒定值的時間。設此時間為t4。
4)持續減速階段,此階段是指汽車以恒定的加速度減速到車速為零的階段。此階段時間記為t4。汽車制動加速度與時間的關系如圖1所示。
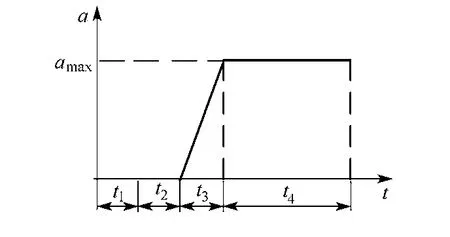
圖1 汽車制動加速度與時間的關系
另設,本車初速度為v初,制動加速度最大恒定值為amax。并且在以上四個階段,分別得出以下汽車制動距離。
(1)t2與t2階段制動距離為s1

(2)t3階段制動距離為s3:由上圖可知,t3內的加速度為那么速度為

那么:

(3)t4階段的制動距離s4:此階段汽車的制動加速度恒為amax。且t4段的初速度為t3段的末速度,即

因為最終的車速要減為零,那么:

最終可得汽車從初速度v本減速到零時的制動距離:

由于式(6)最后一項數值很小,可以忽略,那么此公式可以簡化為

此公式就是汽車制動距離公式,此公式表示的是汽車在以一定的初速度下減速到零時的距離。有了此基礎,我們就可以建立報警模型。
2 模型的建立
兩輛汽車在道路上行駛時,如果后車的速度大于前車的速度,那么兩車會不斷接近,如果駕駛員不及時采取措施就會發生追尾危險。所以有必要在危險潛伏期提醒駕駛員采取制動措施以避免危險發生。所謂報警模型就是通過公式計算出報警距離。此報警距離就是等于汽車的制動距離加上后車減速到零時與前車保持的安全距離。其中,最重要的是要確定駕駛員的制動反應時間,因為反應時間長短直接決定了制動距離的長短,尤其在高速路上車速較高時,此差距尤為明顯。尤其是疲勞駕駛員,他的反應時間比正常駕駛員還要長,那么它所需要的報警距離肯定要比正常不疲勞的駕駛員要長,這樣才安全。我們從兩車的相對位置關系入手來制定報警模型,兩車的相對位置關系如圖2所示。
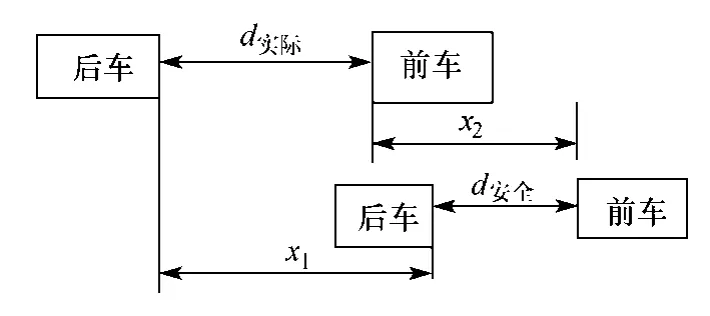
圖2 后車與前車相對位置關系
圖2表示后車在行駛中突然意識到與前車有碰尾的危險并馬上采取制動措施,此時后車距前車距離為d實際。后車減速到零時所行使的距離為x1,此時前車行駛的距離為x2。后車停止時與前車保持安全距離為d安全。此圖表示一種臨界狀態,即實際距離恰好等于報警距離。所以,報警距離為:x1-x2+d安全。
2.1 前車為靜止時
此時x2為0。后車由初速度v初減速到零。此時報警距離為

2.2 前車減速到靜止時
此種情況假設前車減速到靜止,后車也相應的減速到靜止。假設后車與前車恒定制動加速度相等,同為amax,且后車與前車制動器協調時間也相等,同為t2。并設前車初速度為v后,后車初速度為v后,且v后大于v后,且后車速度減去前車速度為后車與前車的相對速度,記為v相對。此時前車由v后加速到停止,則

后車由v后減速到停止,則

此時,報警距離應該為

2.3 各參數確定
對于式(8)與式(11)中的各種速度,可用測速傳感器實現,對于實際距離d實際可用測距傳感器實現。至于疲勞駕駛員反應時間t2在下文中詳細討論。根據相關研究制動器協調時間t2大致取0.2s,制動減速度增長時間t3也取0.2s。至于最大恒定制動加速度amax則根輪胎與路面的附著系數有關,即amax=p.g,其中p為附著系數,g為重力加速度。假設兩車在干燥的瀝青路面上行駛,p取0.6,則amax= 6m/ s2。
3 疲勞駕駛員反應時間討論
眾所周知,如果人在疲勞甚至極度疲勞的狀態下,其反應能力與反應時間與正常人相比較慢,那么針對疲勞駕駛員的汽車防撞報警模型中駕駛員反應時間的參數不能與正常駕駛員通用(經研究正常駕駛員反應時間在0.6~1.5s 之間),否則或導致報警距離過短,容易發生危險。而針對疲勞駕駛員的研究屬于行為科學的研究范疇,本人在閱讀大量的有關行為科學的研究方法的資料之后,提出一種能用來確定疲勞駕駛員的模擬測試方法,模擬駕駛軟件加反應時測試,也就是說模擬動態反應時測試。
“反應時”顧名思義,是測試人在各種刺激下的反應時間的方法。通常為聲光刺激,當聲光刺激發生時,儀器開始計時,當人按下結束按鈕之后計時完畢,通過兩次計時的時間差則得出反應時間。現階段防撞報警系統中,當檢測到前方有危險發生時,開始聲光報警,駕駛員在接受到聲光刺激之后開始采取制動動作,具體的動作就是右腳離開加速踏板并移動到制動踏板上,此為簡單反應。但是我國東港交警部門發布的資料中顯示,在駕駛汽車時是復雜行為,駕駛員要接受多個信號,比如外界環境,路況信息等。駕駛員根據接受的信號進行判斷,所以制動反應中有一個駕駛員判斷的階段,此階段影響了駕駛員的反應時間。而當前我國對駕駛員進行反應時測試則大多的是讓駕駛員在一個靜態的環境下,也就是說不是在駕車的過程中測試,稱之為“靜態反應時”測試。此種測試所得的參數省去了駕駛員的判斷過程,因此結果偏小。但是讓駕駛員在駕車的過程中接受儀器的測試那勢必會增加危險。所以本人提出一種方法,利用模擬駕駛軟件來進行動態反應時測試的模擬,此種軟件是一種虛擬駕駛軟件,能模擬在駕駛時遇到的一切情況。并且操作者旁邊配以反應時測試儀器,基本可以做到一邊駕駛一邊測試。
在行為科學研究中要不斷提出假設,并且通過利用合理的手段測試以驗證假設,本人調查過很多營運車輛駕駛員,以及查閱了很多關于交警部門所發布的針對駕駛員反應時間的資料加上現有的研究,大致可以確定疲勞駕駛員制動反應時間為2s 左右,但只是一種假設,需要通過后期的采樣測試才可最終確定其范圍。而我國針對疲勞駕駛的定義是連續駕車四小時以上就認定為輕微的疲勞,且疲勞程度隨著連續駕駛時間的增長而增長。那么后期計劃就是選擇一些不同年齡段的營運車駕駛員在其下班后進行模擬動態反應時測試(營運車駕駛員連續駕駛時間通常在6h 以上,可以認定為疲勞),以確定其反應時間范圍。
4 仿真實驗
根據已有的研究證實清醒不疲勞的駕駛員反應時間在0.6~1.5s 之間,且反應時間在1s 左右的居多,那么取正常清醒的駕駛員反應時間為1s,疲勞駕駛員反應時間為2s,下面通過利用Matlab 仿真得如圖3曲線。圖3代表前車為靜止時后車的速度與制動報警距離的關系,其中實線代表清醒駕駛員駕車的車速與報警距離關系(d1),點線表示疲勞駕駛員的車速與報警距離關系(d2)。
圖4表示前車減速時制動報警距離與兩車車速的關系,其中上半圖表示清醒駕駛員駕駛后車的車速與前車的相對速度與制動報警距離的關系,下半圖則是疲勞駕駛員的駕駛后車車速和前車的相對車速與制動報警距離的關系。
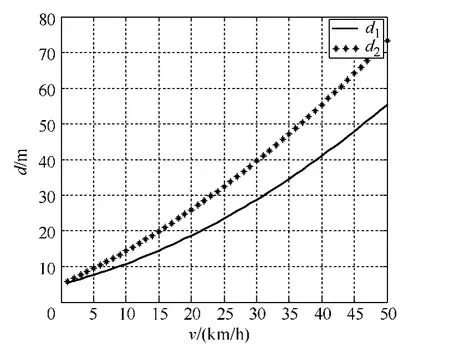
圖3 前車靜止時后車車速與制動報警距離的關系

圖4 前車減速時后車的車速和前車的相對速度與 制動報警距離的關系
通過圖3、圖4的仿真曲線可直觀看出制動報警距離隨車速的變化而變化的關系,與實際車況相符。通過圖片的對比可明顯看出疲勞駕駛員與清醒駕駛員的反應時間大小的差距對報警距離的影響。所以疲勞駕駛員的反應時間對公路行車安全有著重要的影響,研究意義重大。
5 結論
本文建立了一種行車防撞報警模型,并且加入了基于公共知識的行為科學的研究,提出了一種測試疲勞駕駛員反應時間的方法使得此模型不但適用于疲勞駕駛員而且在修改參數之后還可適用于正常駕駛員。在實際應用中,駕駛員可根據自身情況通過觸摸屏選擇疲勞或者清醒模式。當選擇疲勞模式時,設定式(8)和式(12)中駕駛員反應時間t1為2s。當選擇清醒模式時,t1則設定為1s,此時所需要的報警距離與實際車速之間的關系可以清晰直觀的從圖3,圖4看出。式(8)與式(12)代表兩種不同汽車行駛狀態下的報警距離公式,其中(8) 中的v初與式(12)中的v后由本車車速傳感器實時檢測,v相對與實際距離由調頻連續波雷達傳感器實時檢測。通過實證研究之后得出:當v相對等于本車 車速時,并且實時距離不斷變小說明前車靜止或前方為障礙物,此時選擇式(8)并由嵌入式處理器計算出當前的報警距離并且與實際距離相比較,當實際距離小于報警距離時,系統開始聲光報警提示駕 駛員減速。當v相對大小不等于本車車速時并且實際 距離不斷變小,說明前車相對于本車是減速的狀態,此時則選擇式(12)為報警距離的公式。
[1] 楊降勇.高速公路疲勞駕駛交通事故的控制[J].中國安全科學學報,2006,16(1): 44-48.
[2] 劉秀,王長君,何慶.疲勞駕駛交通事故的特點分析與預防[J].中國安全生產科學技術,2008,4(1): 128-131.
[3] 孫瑋,李曉瑩.避免疲勞駕駛的“駕駛員警示系統”[J].交通世界,2006 (01B): 57-57.
[4] 呂立波.汽車防撞報警系統的研究和開發[J].中國人民公安大學學報: 自然科學版,2005(6): 59-62.
[5] 賀大松.汽車縱向防撞報警系統開發[D].成都: 電子科技大學,2008.
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車電器(2018年1期)2018-06-05 01:22:54
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
軍事歷史(1985年2期)1985-01-18 07:39:33
