基于虛擬儀器技術的導航雷達信號采集器設計與實現
2014-05-31 09:44:18鄧萬紅
應用科技 2014年2期
鄧萬紅
中國人民解放軍92493部隊 98分隊,遼寧 葫蘆島 125000
導航雷達作為艦船關鍵設備之一,其工作狀態和回波信號的正常與否對艦船的航行安全有著舉足輕重的影響。除目標信息外,雷達回波信號還包含著大量豐富的遙感信息,作為后續信息提取和分析工作的基礎,實時精確地采集雷達回波信號顯得尤為重要[1-2]。虛擬儀器技術利用高性能的模塊化硬件,結合高效靈活的軟件來完成各種測試、測量和自動化的應用,它利用計算機系統的強大功能結合相應的軟件,突破了傳統儀器在數據處理、顯示、傳送和存儲等方面的限制,給儀器儀表領域帶來了革命性的變化[3-4]。將虛擬儀器技術與面向儀器系統的 PCI擴展(PCI extensions for instrumentation,PXI)技術相結合,不僅提高了系統的性能以及應用的靈活性,同時也保證了系統的可靠性和穩定性[5]。
本文基于虛擬儀器和 PXI技術構建了導航雷達信號采集系統,集導航雷達回波信號采集、同步顯示、雷達工作狀態監視、雷達圖像存儲及回放等多種功能于一體,實現了導航雷達回波模擬視頻信號和多路同步信號的實時高速采集、存儲和圖像的實時回放。該系統在東海臺灣海峽某海區的雷達監測岸基實驗取得了很好的效果。
1 基于PXI的數據采集系統硬件設計
將傳統儀器硬件和最新計算機軟件技術結合起來,以實現并擴展傳統儀器的功能,在智能化、處理能力、性價比和可操作性等方面均比傳統儀器具有明顯的優勢。根據實際科研需求,本文設計的導航雷達信號采集器前端使用的是古野公司出品的1942MK2型導航雷達,涉及視頻回波處理的模擬輸出信號共有4路,其中1路為視頻模擬量(電平在1.5~4 V之間),3路為開關量(分別是船首、方位增量和觸發信號,電平均為CMOS),分析這4路信號的時序特性可知,觸發信號可直接作為A/D采集的同步脈沖,而其他3路信號需要同步進行采集,即需要同步采集1路模擬量和2路開關量信號。基于導航雷達信號采集器的功能需要,模擬視頻信號的采樣頻率不低于20 MHz,A/D采樣分辨率不低于12位,雷達視頻圖像距離不低于4 500 m,通過對市面上幾款常見高速A/D采集卡進行功能性能對比分析,最終選擇了凌華公司出品的PXI9820采集卡。該卡具有14位高分辨率、2通道同步最大65 MS/s采樣頻率特點,適用于高端的數據采集應用,模擬輸入的范圍可由軟件選擇,提供-1~1 V或是-5~5 V兩種范圍,與導航雷達視頻信號電平特性可直接匹配。PXI-9820在觸發數據采集方面提供多樣的選擇,可實現多個模塊同步采集的功能,特別是提供了2組與ADC有相同時鐘的同步取樣數字輸入,非常適用于混合信號(模擬加數字信號)的采集,與本項目的需求直接匹配。由于 PXI-9820的觸發信號和2路開關量輸入端電平均為TTL,和古野1942MK2導航雷達的CMOS開關量輸出電平不能直接匹配,因此在其間加入了信號調理模塊,實現信號的電平轉換。雷達單元產生的船艏信號、方位信號和觸發信號通過信號調理模塊預處理后,同雷達回波信號一起作為A/D采集卡的輸入信號。對于觸發信號只是加簡單的幅值變換,將方位信號和船首信號變換到A/D采樣要求的電平。A/D變換器對輸入信號的幅值有一定的要求,因此在原始雷達視頻信號在送人A/D變換器之前要進行幅值的反向變換,使得雷達視頻信號變成正視頻信號。
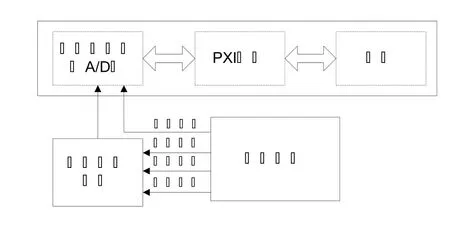
數據采集系統由基于PXI技術的工控機箱,A/D采集卡,PXI總線系統控制器和采集系統軟件構成。數據采集卡采用ADLINK PXI-9820,采集系統基于PXIS-2508型PXI總線工控機平臺和PXI-3950型PXI總線控制器(主板)構建。系統由PXI總線控制器控制采樣系統運行[6-7]。由于PXI來源于PCI,使得系統后續的軟件設計可以采用通用性強的主流軟件模型,提高了系統設計的靈活性[8]。
數據采樣信號包括產生于雷達天線齒輪箱的脈沖量船艏信號和方位信號,以及來自雷達收發機的雷達視頻回波信號。采樣系統以雷達收發機產生的觸發脈沖作為啟動數據采集的外部控制信號,通過船首和方位信號確定采樣數據方位向成像位置,根據回波信號時間先后順序確認距離向位置[9-10]。導航雷達的四路輸出信號通過調理電路模塊接入PXI9820數據采集卡,基于VC++6.0編程完成雷達回波數據采集及其處理。
根據實際科研需求設計的基于虛擬儀器技術的導航雷達信號采集器硬件系統結構如圖1所示。
2 導航雷達數據采集軟件設計
目前主要的虛擬儀器的開發軟件有 Visual C++、Labview等,Visual C++是一個功能強大的可視化軟件開發工具,在數據處理方面具有比Labview無可比擬的優勢。結合導航雷達數據采集系統的功能要求,基于Visual C++6.0設計了數據采集軟件系統,其體系結構如圖2所示,主要包括雷達信號監視、回波信號采集與實時回放、采集數據預處理、采樣數據成像處理、數據存儲等功能模塊。
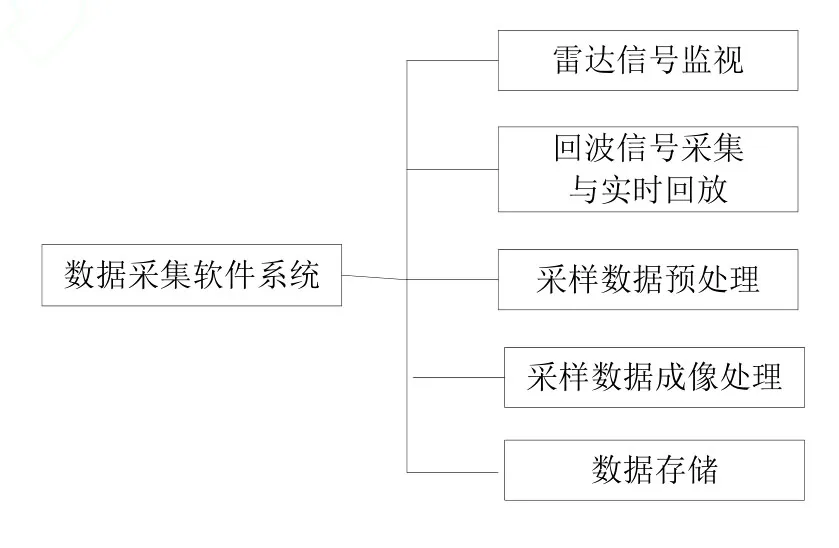
圖2 雷達信號采集器軟件結構
利用Visual C++6.0設計了多路雷達信號采集系統的軟面板,繪制了雷達圖像顯示界面,并對雷達信號參數進行實時監測。在輸出參數組合框中根據實測的觸發頻率、船首周期、方位個數監視雷達的工作狀態,對導航雷達輸出的信號進行實時監測,判斷雷達工作狀態是否正常。
根據用戶實際需求可以在軟面板上進行采樣參數配置,可針對不同型號的導航雷達進行參數配置,有較好的通用性,同時可以在參數配置對話框中選擇對回波信號進行存儲。點擊開始可對雷達回波信號進行采集和實時顯示,并且通過軟件設計的GUI界面顯示圖像相關參數,如當前掃描方位角,采樣距離和其他采樣參數信息,如圖3所示。
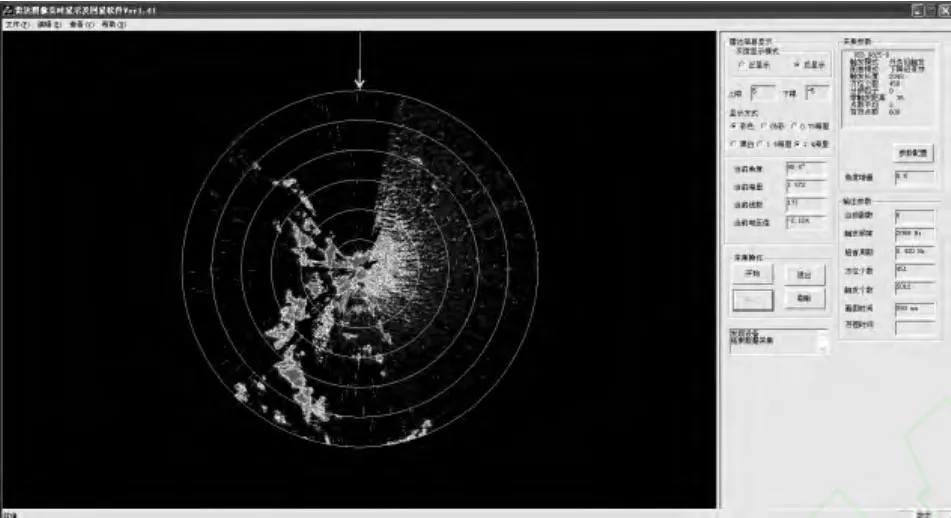
圖3 雷達信號采集器軟件顯示主界面
在同時進行實時顯示和存儲圖像時,當雷達工作在短脈沖時,每幅圖像有 5000多根線,每根線600個點,往往來不及同時處理,對此可以在主界面上設置線數之間的角度間隔,減少畫圖線數,這樣即可以滿足實時顯示和圖像存儲,也不影響雷達圖像觀測效果。
為便于觀測分析,設計了以不同顯示方式對采樣數據圖像進行顯示的功能,包括偽彩、黑白、彩色等3種顯示模式,也可以設置雷達圖像顯示范圍,包括0.75、1.5、2.4海里等3級最大顯示距離,如圖4所示。
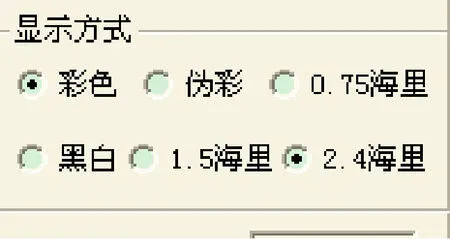
圖4 雷達回波信號顯示方式
為保證獲取回波圖像的連續性,需采樣數據進行連續的數據流存儲,但由于采樣獲取的數據圖像文件較大,同時完成數據采集和圖像顯示比較困難。在此利用9820采集卡的緩存機制和VC++雙線程編程,一個線程用于進行多通道數據采集,將采集到得數據放入系統實時數據緩沖區中;另一個線程用于從緩存中讀出數據進行顯示刷新,并在采集完一幅完整的圖像后進行存儲處理,待文件存儲完畢,再迅速從實時數據緩存中讀出采集到的數據用于刷新顯示,由此獲取了一組連續完整的雷達回波圖像序列。
X波段航海雷達采集的雷達圖像中包含大量的噪聲,這些噪聲的存在將降低雷達圖像的質量,影響對海浪信息的提取。為了便于后續處理,將采集到得數據進行預處理,濾除雷達回波圖像中的噪聲,如同頻干擾、雨雪噪聲、固定物等,這樣大大減少了后續處理時間。
3 關鍵技術及系統實驗
本文分析設計了基于PXI技術的導航雷達回波信號采樣方案,實現了基于PXI技術的硬件平臺,利用Visual C++在Windows系統下編制了采集軟件。基于Windows操作系統,采用多線程機制,設計了實時采樣回放和圖像提取分析軟件,實現了PXI平臺下導航雷達信號采集系統的完整功能。對于設計和實現過程中的關鍵問題,文中給出了合理的解決方案。通過采樣實驗,獲取了大量的有效數據,證實了采樣系統的設計功效。
3.1 關鍵技術
3.1.1 信號調理與多通道同步采集
由于導航雷達的成像特點,為保證采樣數據成像的準確定位,需要采集系統在外觸發的條件下,同時采集視頻回波信號、船首信號和方位信號。考慮到導航雷達的實際輸出信號并不符合采集卡對輸入的要求,在兩者之間加入信號調理模塊。信號調理模塊的主要功能是在保證各信號之間同步性的基礎上,對導航雷達的觸發脈沖、船首信號和方位信號調整幅值,并進行整形濾波,使之滿足采集卡的輸入要求。對于多路信號的同步采集,利用采集卡自身的數字量采樣通道采集船首和方位信號。由于數字量采集通道與模擬量采集通道采樣同步,將采集到的船首和方位信號存儲在高2位,視頻信號存儲在低 14位,減少了對船首信號和方位信號的單獨存儲,降低了存儲的數據量。
3.1.2 板卡緩存設置系統
當采樣參數設為60 MS/s采樣速率,雙通道同時采集時,產生的數據流量為228.9 MB/s。根據實際需求,要求采樣過程必須滿足連續采集32幅以上雷達圖像數據。由此得到的一次采樣過程所獲得的數據量將達到600 MB。在高速數據采集情況下,即使采用大容量緩存仍不能滿足要求。解決此問題,可采用同步記錄的方法。設置板卡緩存空間大小,使之滿足采樣數據寫滿緩存的時間小于緩存數據DMA傳輸時間與后續數據操作時間之和。通過此方法避免內存中前一次傳輸的數據尚未處理完畢,下一次的采樣的數據已經傳輸到,造成實時顯示的圖像不完整或存盤文件的數據缺失。
3.1.3 可靠性
導航雷達的工作環境要求系統具有較高的可靠性,在設計過程中數據采集系統采用了基于PXI技術的硬件平臺。PXI技術結合了PCI的電氣總線特性與Compact PCI的堅固性、模塊化及Eurocard機械封裝的特性,使之適應復雜作業環境的應用。
3.1.4 多線程技術
為了實現高速數據存儲和分析,基于Windows操作系統,采用多線程機制。一個線程專門負責讀取AD數據,另一個線程負責存儲或處理;通過開辟全局緩存來實現兩個線程數據共享,通過事件來實現線程同步。
3.2 系統實驗
2013年 8月起以此設備在國家海洋局福建平潭海洋環境監測站一直在開展海上科研實驗。實驗信源采用1942MK2型導航雷達進行連續圖像采集,雷達參數如表1所示,期間采集到大量雷達海面回波圖像序列。測試區域海深約為20 m,雷達距離海平面高度為 45 m,雷達圖像無遮擋范圍為船首向~,船首方向為地理坐標系的正東向。
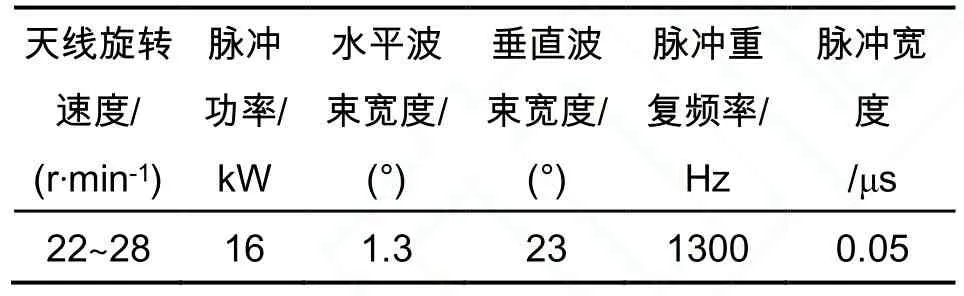
表1 X-波段導航雷達主要技術參數
圖5給出了2013年9月18日獲取的導航雷達海面回波極坐標圖像序列。測量時風向,風速16.4 m/s。極坐標圖像為雷達的海面回波區域。極坐標30°~180°為雷達的海面回波圖像區域,其他區域是由于海岸等遮擋形成的雷達盲區。通過圖5給出的一組雷達圖像序列可以看出,由海表面區域散射的雷達回波受海面波浪的調制,其強度反映在圖像上表現出類似于波浪的明暗條紋變化。海面回波區域中的明亮條紋可以認為是由海浪波峰散射的雷達回波,暗條紋可以認為是海浪波谷,與預期的采樣結果相符。由此表明本數據采集系統很好地實現對導航雷達數據的采集與處理功能。
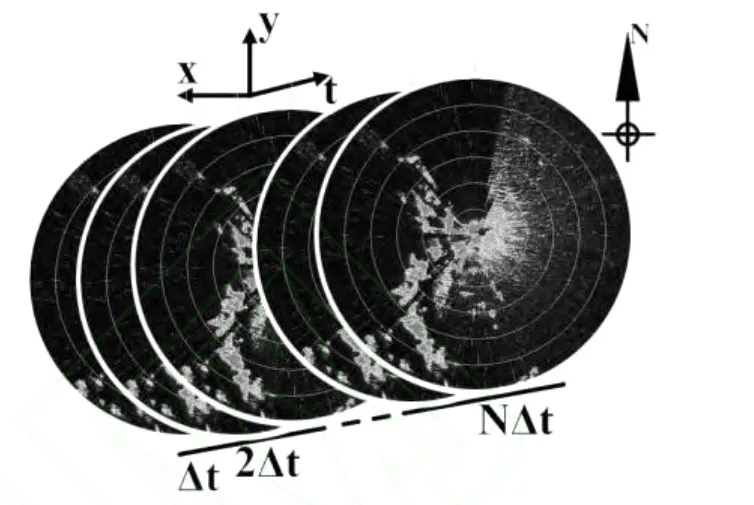
圖5 雷達回波信號圖像序列
4 系統運行與結論
從實現虛擬儀器功能的角度出發,虛擬儀器開發環境需具備如下特點:編程簡單、易于理解和修改;具有強大的人機交互界面設計能力,易于實現各種復雜的儀器面板;具有數據可視化分析能力,提供豐富的儀器和總線接口硬件驅動程序。
利用PXI硬件構建了高效可靠的雷達信號采集平臺,實現了模擬量和數字量多路信號的混合采集。基于Windows操作系統,采用多線程機制,設計了實時采樣回放和圖像提取分析軟件,實現了PXI平臺下導航雷達信號采集系統的完整功能。
導航雷達數據采集器不但可以作為雷達的信號同步調試和外場實驗的數據記錄儀,還可以用于其他多路信號分析和基于PXI技術的采集等方面,充分實現了同一設備的多功能復用,很好地控制了項目成本;同時,采用PXI技術實現系統硬件平臺,精簡了整個系統,減小了系統的體積空間,使儀器工作方式配置靈活,擴展方便,同時提高了系統的可靠性,為現場復雜環境下的實地工作提供了有力保障。
[1]SKOLNIK M I. 雷達手冊[M]. 王軍, 林強, 米慈中, 等譯. 北京:電子工業出版社, 2006: 504-505.
[2]呂浩然, 孫凱. 虛擬儀器在雷達測試方面的應用[J]. 電子科技, 2013(7): 87-90.
[3]高占鳳, 杜顏亮, 蘇木標, 等. 基于虛擬儀器的橋梁遠程狀態數據采集系統[J]. 儀器儀表學報, 2006, 27(10):1361v1364.
[4]盧劍其, 趙擁軍, 黨同心. 虛擬儀器技術在雷達系統測試中的應用[J]. 儀器儀表學報: 增刊, 2005, 26(8):258-261.
[5]劉洪. PXI技術的發展和應用[J]. 測控技術, 2006, 25(6):51-53.
[6]王福友, 袁贛南, 盧志忠, 等. 基 PXI-9820對海浪雷達回波采集系統的設計與實現[J]. 海洋測繪, 2008, 28(2):52-56.
[7]孫堯, 王立寧, 盧志忠. 導航雷達回波信號的實時采集與回放[J]. 微計算機信息, 2009, 25(6): 36-39.
[8]劉肇斌, 陳護勛. PXI總線及其應用綜述[J]. 計算機與數字工程, 2002, 5(2): 33-35.
[9]馬烈. 小型船用導航雷達設計[J]. 現代導航,2013, 4(2):125-128.
[10]羅來金, 曾連蓀, 夏念. 航海雷達數據高速采集回放設計與實現[J]. 電子設計工程, 2011(7): 46-48.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
