電動汽車電驅動系統的EIMC及其魯棒性研究*
2014-06-20 03:19:20董鳳蓮屈穩太
電氣傳動自動化 2014年1期
董鳳蓮,屈穩太
(1.太原科技大學電子信息工程學院,山西太原030024;2.浙江大學寧波理工學院,浙江寧波315100)
1 引言
電機驅動系統是電動汽車的核心。與其他電機相比,永磁無刷直流電動機是一種高性能的電動機,它沒有換向火花,沒有無線電干擾,具有更高的能量密度和效率,在電動汽車中獲得了最廣泛的應用[1]。由于電動汽車運行的環境比較復雜,永磁材料在受到振動、高溫和過載電流作用時,導磁性能可能會下降或發生退磁現象,將降低永磁電動機的性能,進而影響電動汽車的運行質量。針對這一問題,本文采用增強型內模控制方法,顯著提高了電動汽車適應惡劣路面的行駛能力,使電動汽車穩定可靠、高性能地運行。
內模控制是通過被控對象與內部模型的輸出誤差來調整控制器的輸出,使系統穩定在目標范圍內[2],因此,內模控制可以消除不確定性的影響。由于內模控制具有結構簡單、魯棒性強、能消除不可測干擾等優點,近年來已在快響應的電機控制中受到了廣泛的關注。為了充分發揮內模控制的優勢,很多學者把內模控制與各種控制方法相結合形成綜合控制策略。
J C Gonzalez-Gomez等人用基于內模的實時神經模糊控制方法來控制直流電機,可以減少因模型失配和外界干擾引起的誤差[3]。針對雙饋式感應發電機,N Amuthan等人設計了一種直接模型參考自適應內模控制器(DMR-AIMC)[4]。文獻[5]將內模控制和自適應逆控制相結合,有效提高了電動液壓振動臺的跟蹤精度。由于系統的控制性能與模型的精度密切相關,文獻[6]根據非線性內模控制對高斯過程模型進行了擴展,提供了一個分析預測的方法。本文通過對內模控制結構進行改進,引入一種增強型內模控制(EIMC)方法,使系統的魯棒性得到增強。針對電動汽車控制系統模型復雜多變的情況,將EIMC控制結構應用于電動汽車控制系統的速度控制中。在模型失配和負載擾動情況下,研究了調速系統的品質魯棒性和魯棒穩定性,并通過仿真實驗與傳統的PI調節器進行分析和對比。
2 系統建模
2.1 電動汽車動力學模型
根據理論力學和流體力學原理,可以分析電動汽車在行駛過程中的受力。電動汽車在行駛時,動力由電動機的驅動力、斜坡動力(下坡)提供,阻力主要由空氣阻力、滾動阻力、斜坡阻力(上坡)、加速阻力組成[7]。
電動汽車動力學模型為:

式中:Fl為汽車所受的牽引力;Fw為空氣阻力;Fr為滾動阻力;Fi為斜坡阻力;Fj為加速阻力。
(1)牽引力

式中:Te為電磁轉矩;n1、n2分別為主減速器和變速箱的變速比;r為車輪半徑。
(2)空氣阻力
根據空氣動力學原理,空氣阻力可近似表示為:

式中:ρa為空氣密度;ca為空氣阻力系數;s為汽車迎風面積;v為汽車行駛速度。
(3)滾動阻力、斜坡阻力和加速阻力可分別表示為[8]:

式中:m為汽車質量;c1、c2為常數;g為重力加速度;χroad為路面坡度;v˙為汽車行駛加速度。
2.2 電動汽車電機數學模型
電機角速度為:

式中:ωm為電機的角速度。
將汽車的受力歸算到汽車的驅動單元,即式(2)、(6)、(7)代入式(1),可得:

根據PMBLDCM方程
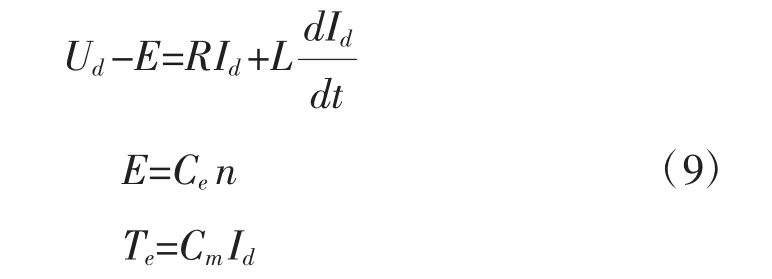
其中:Ce、Cm分別為電機反電動勢系數和轉矩系數,可建立電動汽車用PMBLDCM的數學模型。
3 增強型內模控制(EIMC)及其魯棒性
3.1 增強型內模控制結構
實際的控制系統存在模型不確定性,為了進一步增強內模控制對模型失配和外界干擾的魯棒性,需要對內模控制結構進行改進。將建模誤差反饋到被控對象的輸入端,強迫被控對象的輸出跟隨內部模型的輸出[9]。增強型內模控制(EIMC)結構,如圖1所示。
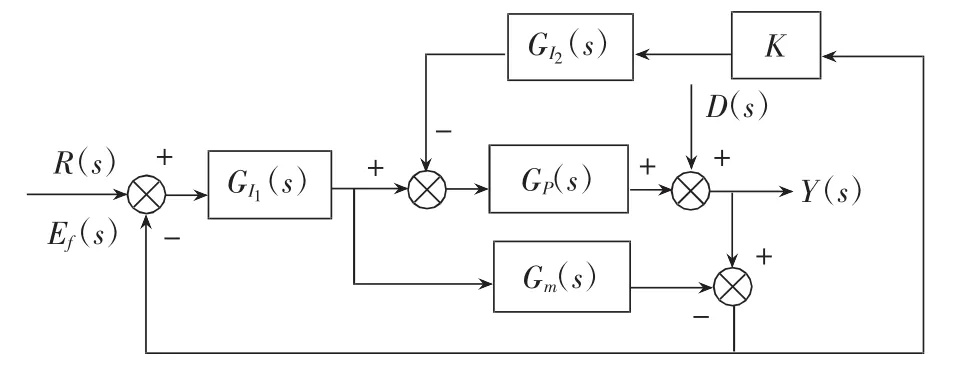
圖1 EIMC結構圖
3.2 EIMC系統的魯棒穩定性
定理1:當模型失配時,基于EIMC的閉環系統穩定的充分必要條件為:

證明:用乘性不確定性界來描述模型的不確定性,閉環系統穩定的充分必要條件為:

內模控制器GI1(jω)和反饋控制器GI2(jω)設計為:

基于式(11)、(12)和(13),可以證明 式(10)成立。
3.3 EIMC系統的品質魯棒性
定理2:當模型失配時,基于EIMC的閉環系統具有品質魯棒性的充分必要條件為:
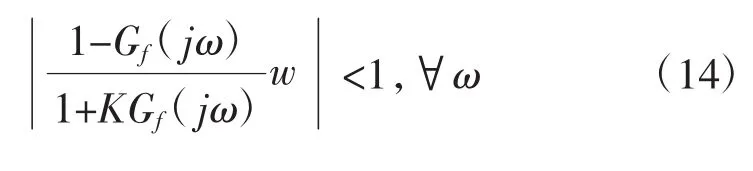
證明:閉環系統具有品質魯棒性的充分必要條件為[10]:
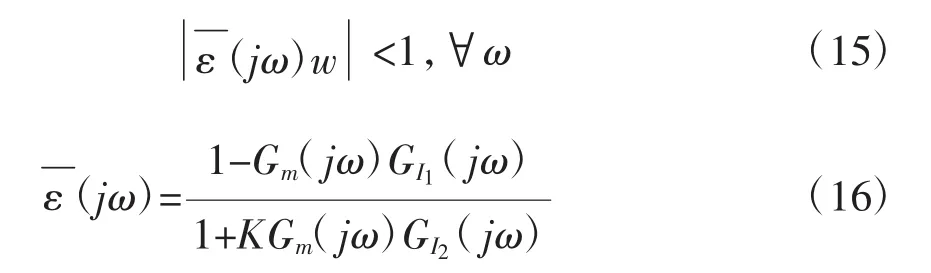
通過式(13)、(15)和(16)可以得到式(14)。式中,w為靈敏度函數的加權因子,一般情況下取w=0.3-0.9[2]。根據式(14),可以看出通過調整濾波器的濾波時間可以使系統獲得較好的品質魯棒性。
4 電動汽車驅動系統控制器及其魯棒性
4.1 閉環調速系統的控制器設計
將EIMC引入電動汽車的PMBLDCM調速系統中,根據增強型內模控制原理設計調速系統的速度控制器。同時,電流控制器采用傳統的PI調節器。電流環的動態結構圖,如圖2所示。

圖2 電流環動態結構圖
設計電流控制器為:

選擇τi=L/R,將電流環等效為速度環中的一個環節,則電流環等效為:

忽略高次項,將閉環傳遞函數近似等效為:

速度環的動態結構圖,如圖3所示。

圖3 轉速環動態結構圖
根據增強型內模控制原理設計速度控制器,采用EIMC的轉速環動態結構圖,如圖4所示。

圖4 采用EIMC的轉速環動態結構圖
為了增強系統的魯棒性,引入低通濾波器Gf(s),將控制器GACR(s)和GI2(s)設計為:

選取1型低通濾波器:

在模型結構參數已知的條件下,電流控制器設計好后,速度控制器只有一個可調參數λn,克服了參數整定復雜的缺點。
4.2 閉環調速系統的魯棒性
閉環調速系統存在模型不確定性時,系統的魯棒性由魯棒穩定性和品質魯棒性組成。
當模型失配時,通過式(11)、(22)可知,采用EIMC的閉環調速系統穩定的充分必要條件為:

上式表明:當K一定時,通過調整λn可以保證閉環調速系統穩定。
當模型失配時,根據式(14)、(21),采用EIMC的閉環調速系統具有品質魯棒性的充分必要條件為:

由上式可以看出:當K一定時,調整λn可以使調速系統獲得較好的品質魯棒性。
5 系統仿真
本文采用永磁無刷直流電機作為仿真實驗對象,分別采用EIMC方法和傳統PI調節,比較速度控制魯棒性的強弱。永磁無刷直流電機(PMBLDCM)參數選取為:220V;l86A;300r/min。電動汽車傳動系統參數選取為[8]:車體總質量m=1350kg;總慣量J=145kgm2;車輪半徑r=0.29m;總變速比n=n1n2=7;迎風面積s=2.31m2;空氣阻力系數ca= 0.32;空氣密度ρa=1.205kg/m3;滾動阻力系數c1=8.8×10-2;c2=-6.42×10-4;g =9.8N/kg。
兩種控制方法的仿真結果,如圖5-圖7所示。圖5、圖6和圖7分別為路面凹凸不平、反電動勢和轉矩系數存在擾動和溫度升高時電機速度與電流的變化過程,其中,(a)和(b)分別為速度的過渡過程和跟蹤誤差,(c)和(d)分別為直流電流的過渡過程和跟蹤誤差。


圖5 路面坡度不斷變化時仿真曲線
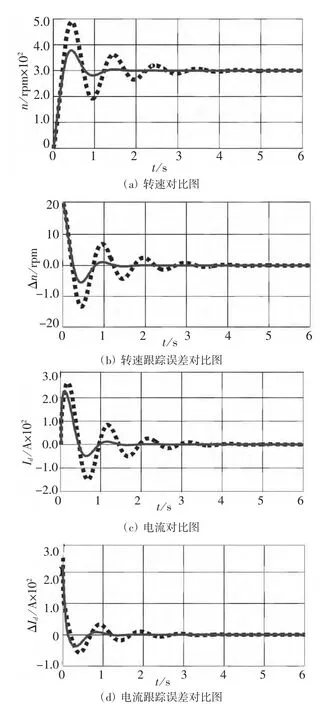
圖6 反電動勢和轉矩系數擾動時仿真曲線

圖7 溫度升高時仿真曲線
由以上圖形可以看出,EMIC控制方法,在3種情況下,速度和電流的過渡過程超調量、跟蹤誤差和跟蹤時間均優于傳統的PI控制方法。
6 結論
針對電動汽車惡劣的運行環境和復雜多變的控制系統模型,本文根據EIMC原理控制永磁無刷直流電機(PMBLDCM)提高電動汽車控制系統適應模型失配的能力。文中分析了增強型內模控制系統存在模型不確定性時的魯棒性。通過互補靈敏度函數η(s)研究系統的魯棒穩定性,并通過靈敏度函數ε(s)分析系統的品質魯棒性。分析結果表明,通過調整濾波器的濾波時間可以使控制系統同時具有較強的魯棒穩定性和較好的品質魯棒性。為了增強電動汽車控制系統的魯棒性,將EIMC方法應用于以永磁無刷直流電機(PMBLDCM)為動力的電動汽車控制系統的速度控制中。理論分析和仿真結果表明,在模型失配和負載擾動的情況下,EIMC可以提高電動汽車控制系統的魯棒穩定性和品質魯棒性。根據EIMC原理設計的速度控制器僅有一個調節參數,便于工程應用中在線調整。
[1]張 敏.電動車用永磁無刷直流電機驅動系統研究[D].華中科技大學,2012.
[2]Garcia C E,Morari M.Internal Model Control.1.A Unifying Review and Some New Results[J].Ind Eng Chen Process Des Dev,1982,21(2):308-323,3-5.
[3]J C Gonzalez-Gomez,J A Ruz-Hernandez,R Garcia-Hernandez,F Ornelas-Tellez.Real-Time Neuro-Fuzzy Control Based on Internal Model Applied to a DC Motor[C].World Automation Congress(WAC),2012,1-4.
[4]N Amuthan,P Subburaj,P Melba Mary.Direct Mo del Reference Adaptive Internal Model Controller for Better Voltage Sag Ride through in Doubly Fed Induction Generator WindFarms[J].ElectricalPowerandEnergySystems,2013,47:255-263.
[5]Gang Shen,Zhencai Zhu,Yu Tang,et al.Combined Control Strategy Using Internal Model Control and Adaptive Inverse Control for Electro-Hydraulic Shaking table[J].Journal of MechanicalEngineeringScience,2012,1-13.
[6]Gregor Gregorcic,Gordon Lightbody.Gaussian Process Internal ModelControl[J].International Journal of Systems Science,2012,43(11):2079-2094.
[7]劉和平,戰祥真等.慣量自補償的純電動汽車動力系統模擬試驗臺研究[J].電機與控制學報,2011,15(10):56-57.
[8]焦曉紅,李 帥.永磁同步電機驅動電動汽車速度自適應控制[J].電機與控制學報,2011,15(11):84-85.
[9]周 涌,陳慶偉,胡維禮.內模控制研究的新發展[J].控制理論與應用,2004,21(3):477-478.
[10]朱鳳成.魯棒控制與內模控制及其應用[D].北京化工大學,2002,19-20,10-12.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
