基于Ansoft軟件的牽引用直線感應(yīng)電機(jī)的有限元分析*
2014-06-21 10:49:28陶彩霞
城市軌道交通研究 2014年3期
李 霄 陶彩霞
(蘭州交通大學(xué)自動(dòng)化與電氣工程學(xué)院,730070,蘭州∥第一作者,碩士研究生)
城市的發(fā)展對(duì)新建城市軌道交通線路的制約條件越來(lái)越多,人們對(duì)軌道交通的要求也越來(lái)越高。直線感應(yīng)電機(jī)軌道系統(tǒng)比傳統(tǒng)感應(yīng)電機(jī)軌道交通系統(tǒng)擁有更小的曲線半徑、更強(qiáng)的爬坡能力,易在復(fù)雜的城市環(huán)境中運(yùn)行,已成為多種城市軌道交通系統(tǒng)中的一員。廣州地鐵4號(hào)線、5號(hào)線和6號(hào)線,以及北京軌道交通首都國(guó)際機(jī)場(chǎng)線,都選擇了這種城市軌道交通系統(tǒng)。然而,對(duì)于直線感應(yīng)電機(jī)而言,存在道岔處感應(yīng)板不連續(xù)、氣隙值大、邊端效應(yīng)等問(wèn)題[1-3]。本文利用 Ansoft軟件的 Transient模塊,采用有限元方法對(duì)直線感應(yīng)電機(jī)在起動(dòng)、穩(wěn)態(tài)運(yùn)行及經(jīng)過(guò)道岔處的動(dòng)態(tài)性能進(jìn)行了分析。
1 牽引用直線感應(yīng)電機(jī)的原理及特性
軌道交通一般采用短初級(jí)、復(fù)合感應(yīng)板的單邊型直線感應(yīng)電機(jī),其工作原理與旋轉(zhuǎn)感應(yīng)電機(jī)相同(如圖1所示)。初級(jí)繞組被安裝在列車底部,次級(jí)感應(yīng)板鋪設(shè)在軌道中心。由于初級(jí)繞組的開斷,形成了兩個(gè)邊端。為了確保運(yùn)行的安全,初級(jí)與次級(jí)感應(yīng)極之間的間隙遠(yuǎn)遠(yuǎn)大于旋轉(zhuǎn)電動(dòng)機(jī)的氣隙,因此體現(xiàn)出了多種特性。

圖1 短初級(jí)單邊型直線感應(yīng)電機(jī)
直線感應(yīng)電機(jī)不同于旋轉(zhuǎn)感應(yīng)電機(jī)的最大特點(diǎn)就是存在邊端效應(yīng)。邊端效應(yīng)可分為靜態(tài)橫向邊端效應(yīng)、動(dòng)態(tài)橫向邊端效應(yīng)、靜態(tài)縱向邊端效應(yīng)和動(dòng)態(tài)縱向邊端效應(yīng)。在直線感應(yīng)電機(jī)軌道交通系統(tǒng)中,靜態(tài)橫向邊端效應(yīng)的本質(zhì)是空載氣隙磁場(chǎng)的橫向擴(kuò)散。當(dāng)初級(jí)鐵心疊片厚度小于次級(jí)感應(yīng)板寬度時(shí),這種效應(yīng)對(duì)電機(jī)的影響往往可以忽略。動(dòng)態(tài)橫向邊端效應(yīng)與次級(jí)感應(yīng)板橫向超出初級(jí)繞組的長(zhǎng)度和極距的比值相關(guān):比值越大,動(dòng)態(tài)橫向邊端效應(yīng)對(duì)電機(jī)的影響就越小。通常比值大于0.4時(shí),動(dòng)態(tài)橫向邊端效應(yīng)的影響會(huì)極大地削弱。增加電機(jī)的極數(shù)會(huì)減小互感之間的不對(duì)稱。當(dāng)極數(shù)增加到6以上時(shí)動(dòng)態(tài)橫向邊端效應(yīng)的影響可以忽略。縱向動(dòng)態(tài)邊端效應(yīng)對(duì)牽引用直線感應(yīng)電機(jī)的影響最大,需對(duì)其電磁特性進(jìn)行分析,并在電機(jī)的設(shè)計(jì)和控制上進(jìn)行完善。縱向動(dòng)態(tài)邊端效應(yīng)所帶來(lái)的影響是牽引用直線感應(yīng)電機(jī)要解決的主要問(wèn)題之一[1]。
2 直線感應(yīng)電機(jī)的磁場(chǎng)基本方程
直線感應(yīng)電機(jī)因其特有的邊端效應(yīng),需利用麥克斯韋方程組計(jì)算其特性。麥克斯韋方程組需要作一些修改才能應(yīng)用于直線感應(yīng)電機(jī)。因?yàn)樵诮蛔兇艌?chǎng)中導(dǎo)電媒質(zhì)除因磁場(chǎng)隨時(shí)間發(fā)生變化而產(chǎn)生感應(yīng)電場(chǎng)外,還因磁場(chǎng)與導(dǎo)電媒質(zhì)之間的相對(duì)運(yùn)動(dòng)而產(chǎn)生的速度電場(chǎng)。這兩種電場(chǎng)在導(dǎo)電媒質(zhì)中共同引起了感應(yīng)電流。另外,直線感應(yīng)電機(jī)的激勵(lì)頻率較低,所以位移電流可以忽略不計(jì)[4]。經(jīng)過(guò)修改后,用于直線感應(yīng)電機(jī)的基本電磁場(chǎng)方程為:
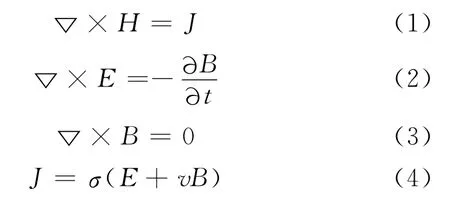
式中:
H——磁場(chǎng)強(qiáng)度;
E——電場(chǎng)強(qiáng)度;
B——磁感應(yīng)強(qiáng)度(磁通密度);
J——電流密度;
σ——電導(dǎo)率;
t——時(shí)間;
v——電荷在磁場(chǎng)中的運(yùn)動(dòng)速度。
為了估算磁場(chǎng)作用下所產(chǎn)生的力F,采用麥克斯韋應(yīng)力張量是一種有效的方法。式(5)通過(guò)對(duì)一個(gè)包含初級(jí)繞組的封閉曲面進(jìn)行面積分,來(lái)估算F

式中:
n——封閉曲面上的單位法向量;
B——磁感應(yīng)強(qiáng)度矢量;
S——封閉曲面的面積。
那么磁場(chǎng)產(chǎn)生的推力和垂向力分別是力F的x和y向的分量,可分別表示為:
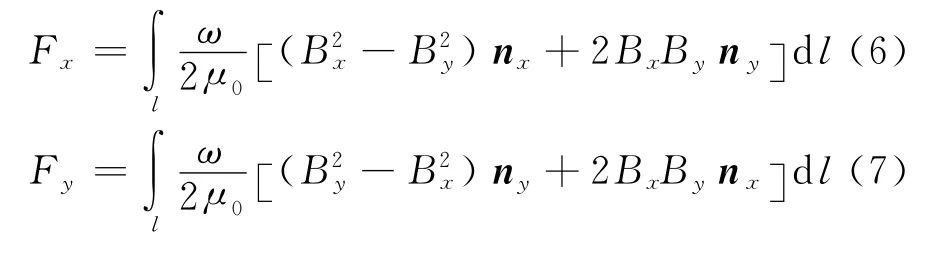
式中:
Bx——磁感應(yīng)強(qiáng)度的x向分量;
By——磁感應(yīng)強(qiáng)度的y向分量;
nx——封閉曲面上x向的單位正交矢量;
ny——封閉曲面上y向的單位正交矢量;
μ0——真空磁導(dǎo)率;
ω——初級(jí)鐵心的寬度;
l——在二維分析中的圍繞初級(jí)繞組區(qū)域的一條閉合線[5]。
3 牽引用直線感應(yīng)電機(jī)的有限元仿真分析
3.1 有限元分析模型
通過(guò)Ansoft Maxwell 2D軟件的Transient求解器,采用運(yùn)動(dòng)表面算法對(duì)做平移運(yùn)動(dòng)的直線感應(yīng)電機(jī)進(jìn)行瞬態(tài)仿真。忽略直線感應(yīng)電機(jī)的橫向邊端效應(yīng),考慮道岔處感應(yīng)板不連續(xù)的情況,對(duì)牽引用直線感應(yīng)電機(jī)進(jìn)行建模。電機(jī)主要參數(shù)見表1。
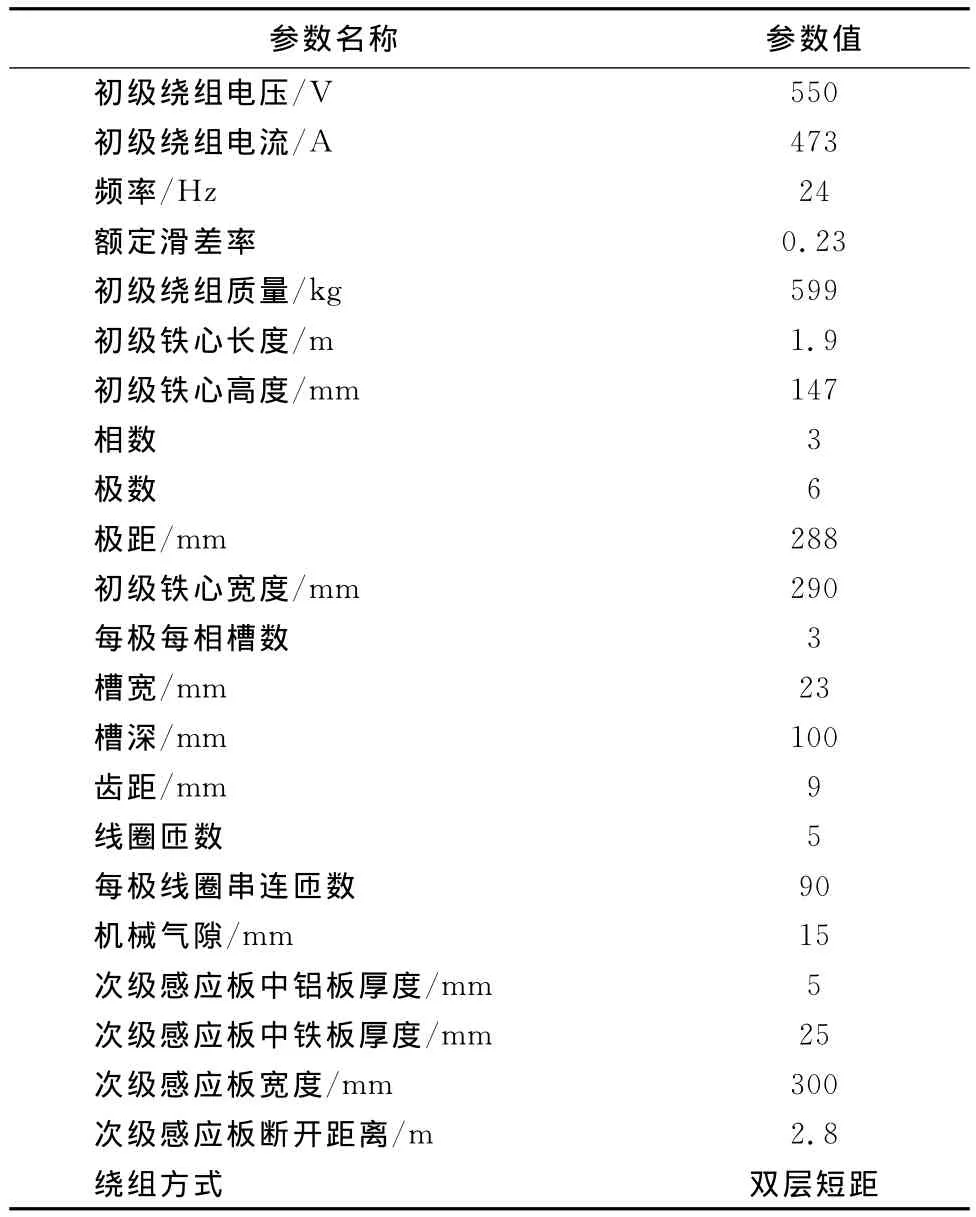
表1 牽引用直線感應(yīng)電機(jī)主要參數(shù)表[6]
建模過(guò)程主要分為:生成幾何模型,選定材料,設(shè)定激勵(lì)源和邊界條件,定義執(zhí)行參數(shù)和定義求解選項(xiàng)[7]。其中,定義求解選項(xiàng)時(shí)需設(shè)置一個(gè)運(yùn)動(dòng)區(qū)域。該區(qū)域?qū)⑦\(yùn)動(dòng)的初級(jí)繞組和靜止不動(dòng)的次級(jí)感應(yīng)板分開,做平移運(yùn)動(dòng)的初級(jí)繞組必須始終在運(yùn)動(dòng)區(qū)域中,并按照時(shí)間步長(zhǎng)和速度值的設(shè)定做時(shí)步位移運(yùn)動(dòng)。為了使初級(jí)繞組在模擬運(yùn)動(dòng)中有足夠的運(yùn)動(dòng)空間,運(yùn)動(dòng)區(qū)域要設(shè)置得足夠長(zhǎng)。物理模型如圖2所示。對(duì)模型的氣隙部分進(jìn)行了細(xì)致剖分,以得到磁場(chǎng)產(chǎn)生的推力、垂向力和氣隙磁場(chǎng)的精確計(jì)算結(jié)果。網(wǎng)絡(luò)剖分如圖3所示。
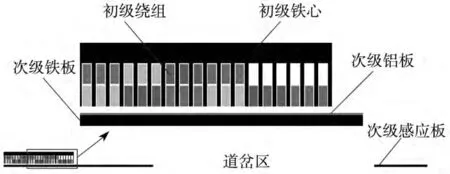
圖2 直線感應(yīng)電機(jī)物理模型圖
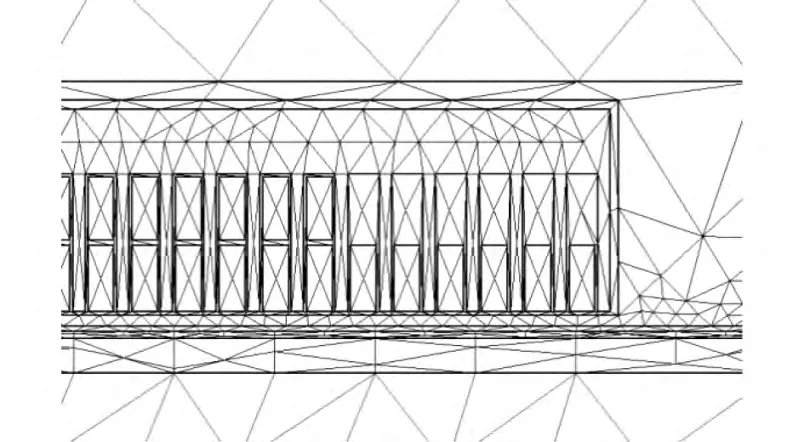
圖3 直線感應(yīng)電機(jī)網(wǎng)絡(luò)剖分圖
3.2 動(dòng)態(tài)性能分析
采用二維時(shí)步有限元分析法,通過(guò)后處理可以得到磁場(chǎng)產(chǎn)生的推力、垂向力、速度、位移及氣隙中的磁通分布曲線[8]。
當(dāng)直線感應(yīng)電機(jī)空載運(yùn)行、初速度為零、t=0.01s時(shí),磁力線分布如圖4所示。從圖中可以看出,磁通線由電機(jī)軛、電機(jī)齒進(jìn)入空氣隙后穿入次級(jí)感應(yīng)板;再?gòu)牧硪粋€(gè)電機(jī)齒進(jìn)入電機(jī)軛,形成一個(gè)極的閉合磁通線。由于電機(jī)兩端存在半填充槽,利用率低,從而產(chǎn)生漏磁通。如圖4所示電機(jī)含有6個(gè)極,其中5個(gè)完整的極和1個(gè)兩端分開的極,兩端磁通線通過(guò)空氣閉合[9]。
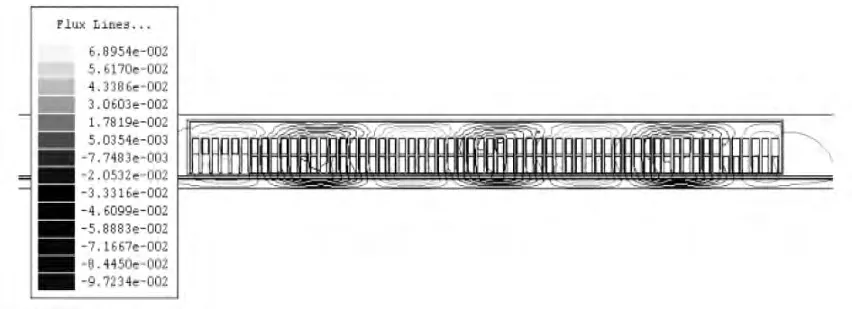
圖4 直線感應(yīng)電機(jī)磁力線分布仿真圖(t=0.01s)
圖5~圖8為不同時(shí)刻直線感應(yīng)電機(jī)運(yùn)行位置與氣隙磁場(chǎng)密度分布圖。t=1.1s時(shí),電機(jī)運(yùn)行至圖5-a)所示的位置,初級(jí)繞組的入端部分已和次級(jí)感應(yīng)板脫離;此時(shí)氣隙磁場(chǎng)密度分布如圖5-b)所示,入端無(wú)次級(jí)感應(yīng)板區(qū)域的氣隙磁場(chǎng)分布相對(duì)平緩,沒(méi)有電機(jī)極的體現(xiàn),相當(dāng)于電機(jī)極數(shù)減少,牽引能力隨之減弱。t=1.5s時(shí),電機(jī)運(yùn)行至圖6-a)所示的位置,初級(jí)繞組和次級(jí)感應(yīng)板完全脫離,氣隙磁場(chǎng)密度分布如圖6-b)所示;兩者的電磁感應(yīng)作用消失,磁通密度集中分布在同一區(qū)域。t=2s時(shí),電機(jī)運(yùn)行至圖7-a)所示的位置,初級(jí)繞組的入端部分駛出道岔,重新和次級(jí)感應(yīng)板作用;此時(shí)氣隙磁場(chǎng)密度分布如圖7-b)所示,隨著電機(jī)的繼續(xù)運(yùn)行,相當(dāng)于極數(shù)隨之增加,電機(jī)逐漸恢復(fù)正常運(yùn)行狀態(tài)。t=2.3s時(shí),電機(jī)運(yùn)行至圖8-a)所示的位置,次級(jí)感應(yīng)板完全覆蓋初級(jí)繞組;此時(shí)氣隙磁場(chǎng)密度分布如圖8-b)所示,可明顯看到縱向邊端效應(yīng)的影響,而入端氣隙磁場(chǎng)密度小于出端氣隙磁場(chǎng)密度。
圖9為直線感應(yīng)電機(jī)的推力隨時(shí)間變化的曲線。當(dāng)電機(jī)為空載運(yùn)行時(shí),推力在初期處于震蕩狀態(tài),0.52s后轉(zhuǎn)為穩(wěn)態(tài),實(shí)際推力方向與軟件中定義的推力方向相同,因此推力為正值;在0.78s后電機(jī)運(yùn)動(dòng)到感應(yīng)板的邊緣位置,進(jìn)入無(wú)感應(yīng)板的道岔區(qū)域,推力開始下降直到為零;當(dāng)電機(jī)移出道岔重新和感應(yīng)板相作用時(shí),推力開始回升至穩(wěn)態(tài)。圖10為直線感應(yīng)電機(jī)的垂向力隨時(shí)間變化的曲線,其變化規(guī)律同推力曲線大致相同。穩(wěn)態(tài)的垂向力為正值,表現(xiàn)為吸引力。當(dāng)電機(jī)在道岔區(qū)域時(shí)垂向力為零,吸力消失,影響電機(jī)的穩(wěn)定運(yùn)行。
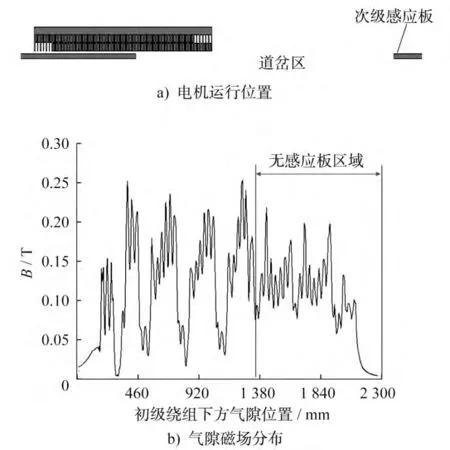
圖5 直線感應(yīng)電機(jī)運(yùn)行位置與氣隙磁場(chǎng)分布圖(t=1.1s)
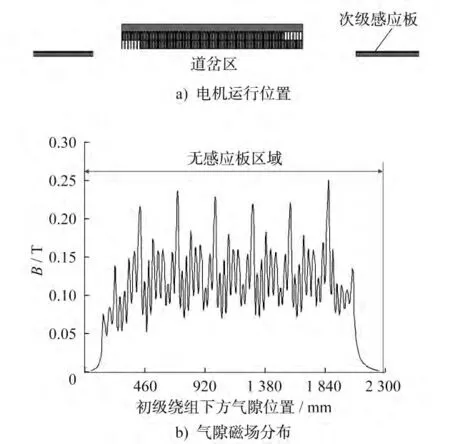
圖6 直線感應(yīng)電機(jī)運(yùn)行位置與氣隙磁場(chǎng)分布圖(t=1.5s)
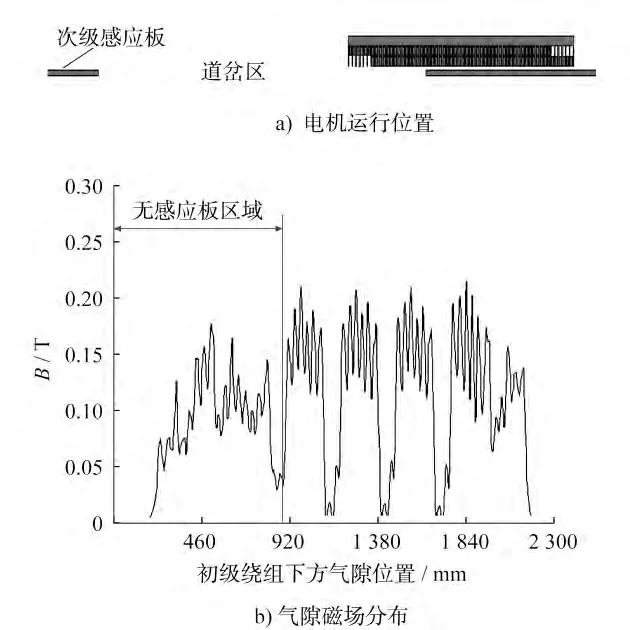
圖7 電機(jī)運(yùn)行位置與氣隙磁場(chǎng)分布圖(t=2s)
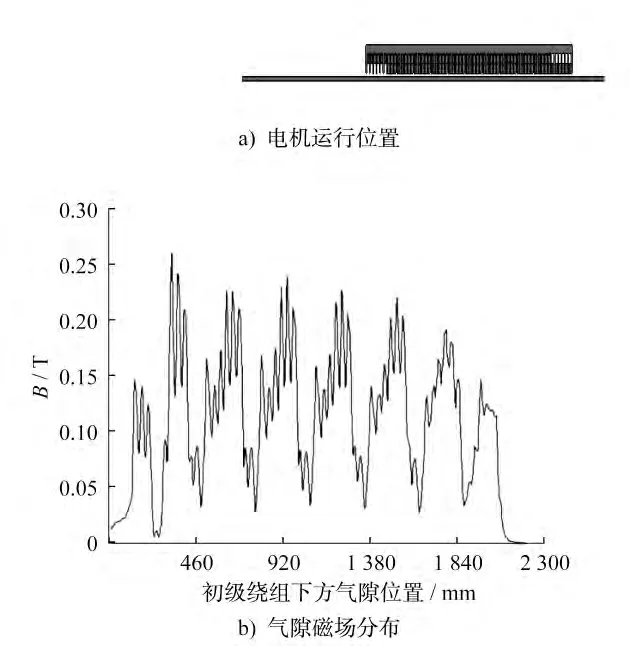
圖8 電機(jī)運(yùn)行位置與氣隙磁場(chǎng)分布圖(t=2.3s)
4 結(jié)論
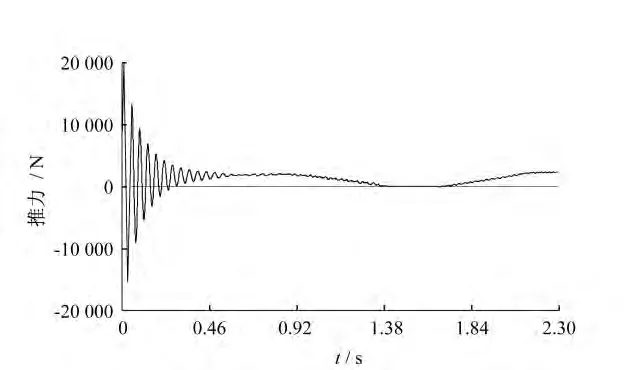
圖9 直線感應(yīng)電機(jī)的推力隨時(shí)間變化曲線
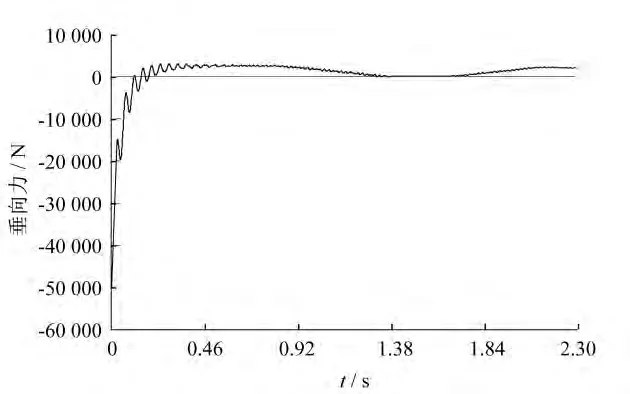
圖10 直線感應(yīng)電機(jī)的垂向力隨時(shí)間變化曲線
本文簡(jiǎn)析了直線感應(yīng)電機(jī)在軌道交通中的特性,運(yùn)用有限元方法,忽略橫向邊端效應(yīng),并考慮道岔處感應(yīng)板不連續(xù)的情況,建立了牽引用直線感應(yīng)電機(jī)的二維瞬態(tài)電磁場(chǎng)模型;得到并分析了牽引用直線感應(yīng)電機(jī)的磁力線、推力、垂向力和氣隙磁場(chǎng)的特性曲線。仿真結(jié)果描述了直線感應(yīng)電機(jī)運(yùn)行至道岔區(qū)域時(shí)的變化規(guī)律,為牽引用直線感應(yīng)電機(jī)的電磁設(shè)計(jì)與控制方法的優(yōu)化提供了參考。
[1]鄭瓊林,趙佳,樊嘉峰.直線電機(jī)軌道交通牽引傳動(dòng)系統(tǒng)[M].北京:中國(guó)科學(xué)技術(shù)出版社,2009:1.
[2]劉智成.直線電機(jī)運(yùn)載技術(shù)在廣州地鐵的應(yīng)用[J].世界軌道交通,2005(3):52.
[3]魏慶朝,蔡昌俊,龍?jiān)S友.直線電機(jī)軌道交通概論[M].北京:中國(guó)科學(xué)技術(shù)出版社,2009:8.
[4]龍遐令.直線感應(yīng)電動(dòng)機(jī)的理論和電磁設(shè)計(jì)方法[M].北京:科學(xué)出版社,2006:22.
[5]Im Dal-Ho,Kim Chang-Eob.Finite element force calculation of a linear induction motor taking account of the movement[J].IEEE Transactions on Magnetics,1994,30(5):3495.
[6]Nonaka S,Higuchi T.Design of single-sided linear induction motors for urban transit[J].IEEE Transactions on Vehicular Technology,1988,37(3):167.
[7]趙博,張洪亮.ansoft12在工程電磁場(chǎng)中的應(yīng)用[M].北京:中國(guó)水利水電出版社.2010:130.
[8]郭明珠,方進(jìn),李永亮,等.基于ANSYS的高溫超導(dǎo)直線感應(yīng)電機(jī)仿真分析[J].超導(dǎo)技術(shù),2008,36(3):23.
[9]裘昌利,張紅梅,劉少克.基于Ansoft的直線感應(yīng)電機(jī)性能分析[J].微特電機(jī),2006(12):22.
猜你喜歡
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂(lè)園·綜合智能(2021年12期)2022-01-18 05:46:42
核科學(xué)與工程(2021年4期)2022-01-12 06:30:26
今日農(nóng)業(yè)(2020年19期)2020-12-14 14:16:52
中學(xué)物理·高中(2016年12期)2017-04-22 11:53:03
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
Coco薇(2016年1期)2016-01-11 16:53:24
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
