無耦合運動微創(chuàng)手術(shù)器械的設(shè)計與實驗
2014-06-23 16:22:35付宜利邱雪芹徐殿國
哈爾濱工業(yè)大學(xué)學(xué)報 2014年9期
潘 博,付宜利,邱雪芹,徐殿國
(1.哈爾濱工業(yè)大學(xué)機器人技術(shù)與系統(tǒng)國家重點實驗室,150080哈爾濱;2.哈爾濱工業(yè)大學(xué)電氣工程及自動化學(xué)院,150001哈爾濱)
無耦合運動微創(chuàng)手術(shù)器械的設(shè)計與實驗
潘 博1,2,付宜利1,邱雪芹1,徐殿國2
(1.哈爾濱工業(yè)大學(xué)機器人技術(shù)與系統(tǒng)國家重點實驗室,150080哈爾濱;2.哈爾濱工業(yè)大學(xué)電氣工程及自動化學(xué)院,150001哈爾濱)
為增加微創(chuàng)手術(shù)器械操作的靈活性,提高主從操作性能,設(shè)計一種新型無耦合運動微創(chuàng)手術(shù)器械.在分析耦合運動產(chǎn)生的原理和現(xiàn)有消除耦合運動方法的基礎(chǔ)上,提出一種在腕部傳動軸中心打孔走線的微創(chuàng)手術(shù)器械設(shè)計方法,研制出具有4個自由度的無耦合手術(shù)器械.該無耦合手術(shù)器械采用鋼絲進行傳動,可實現(xiàn)術(shù)中快速更換,并具有使用信息記錄功能.求解手術(shù)器械及主手的運動學(xué),研究手術(shù)器械主從式控制方法,并建立主從控制實驗平臺.實驗結(jié)果表明:器械腕部單獨運動時,器械腕部與兩個手指之間位置相對不變,消除了耦合運動,具有較好的主從操作性能,有利于微創(chuàng)手術(shù)操作.
微創(chuàng)手術(shù);機器人;控制;器械;耦合運動
微創(chuàng)手術(shù)具有創(chuàng)傷小、恢復(fù)快等優(yōu)點,得到了廣泛地應(yīng)用.機器人技術(shù)與微創(chuàng)外科技術(shù)相結(jié)合,改善了醫(yī)生進行微創(chuàng)手術(shù)的環(huán)境和工具,提高了手術(shù)質(zhì)量[1].目前,醫(yī)療機器人技術(shù)已經(jīng)成為國際前沿研究熱點之一[2],美國、歐盟、以色列、日本、韓國等國家紛紛將其作為未來高技術(shù)研究和戰(zhàn)略性新興產(chǎn)業(yè)之一[3-4].
在機器人微創(chuàng)手術(shù)中,需要將狹長的手術(shù)器械通過10 mm的小孔探入體腔來進行相關(guān)手術(shù)操作,手術(shù)器械末端執(zhí)行器的運動精度和靈活度將影響到手術(shù)的質(zhì)量和效果.da Vinci系統(tǒng)中的Endowrist系列手術(shù)器械在技術(shù)上比較成熟,包含分離鉗、剪刀、單極電凝、雙極電凝等工具,器械桿部直徑為5~10 mm[5].器械依據(jù)不同種類一般具有3或4個自由度,使用鋼絲進行傳動,為保障器械運動的精確性和可靠性,每使用10次就需更換新的手術(shù)器械[6-7].Zeus系統(tǒng)作為早期微創(chuàng)手術(shù)機器人的成功案例,已開發(fā)出一整套微創(chuàng)手術(shù)器械,包括手術(shù)刀、鑷子、剪子、針持器、穩(wěn)定夾等,可以實施多種機器人微創(chuàng)外科手術(shù)[8].美國密歇根州立大學(xué)科研人員提出一種齒輪鏈傳動方式的微創(chuàng)手術(shù)器械A(chǔ)MMIS,器械整體彎曲范圍達到±180°,具有較大的運動空間和較高的靈活度;其不足是對齒輪及齒輪架制造精度要求過高,傳動結(jié)構(gòu)對灰塵較敏感[9].天津大學(xué)研制了應(yīng)用于“妙手A”系統(tǒng)的系列化手術(shù)器械,可以實現(xiàn)微創(chuàng)手術(shù)切開、剝離、止血、縫合等操作,采用鋼絲進行動力傳遞,其研制的手術(shù)器械已經(jīng)在動物試驗中進行了應(yīng)用[10-11].哈爾濱工業(yè)大學(xué)機器人研究所研制了一種采用單元關(guān)節(jié)配置的微創(chuàng)手術(shù)器械,通過為腕部機構(gòu)配置不同數(shù)目的單元關(guān)節(jié),來滿足不同器械對腕部自由度及運動范圍的不同要求[12-13].
本文針對微創(chuàng)手術(shù)器械采用鋼絲傳動而存在的耦合運動問題,提出一種在腕部傳動軸中心打孔走線的微創(chuàng)手術(shù)器械設(shè)計方法,研制出無耦合運動的微創(chuàng)手術(shù)器械,并開展微創(chuàng)手術(shù)器械的主從控制方法研究.通過耦合運動測試及主從控制實驗,驗證微創(chuàng)手術(shù)器械設(shè)計方法及主從控制方法的有效性.
1 耦合運動分析
手術(shù)器械是微創(chuàng)手術(shù)機器人進行手術(shù)操作的執(zhí)行部分,其性能直接影響到機器人微創(chuàng)手術(shù)的質(zhì)量和效率.器械一般具有3或4個自由度,以最具代表性的組織鉗進行分析,其具有4個自由度,采用鋼絲實現(xiàn)動力的傳遞.組織鉗末端一般采用如圖1所示的結(jié)構(gòu),主要由左指、右指、腕部、腕桿連接件、導(dǎo)向輪等構(gòu)成.組織鉗可實現(xiàn)操作桿旋轉(zhuǎn)、腕部旋轉(zhuǎn)、左指旋轉(zhuǎn)和右指旋轉(zhuǎn)4個動作.兩個手指運動相互獨立,其相對運動實現(xiàn)夾持操作,同向運動實現(xiàn)偏擺操作.在運動分析中發(fā)現(xiàn),當(dāng)腕部進行俯仰運動時會導(dǎo)致器械末端手指運動,這種耦合運動在實際應(yīng)用中會帶來諸多不便.
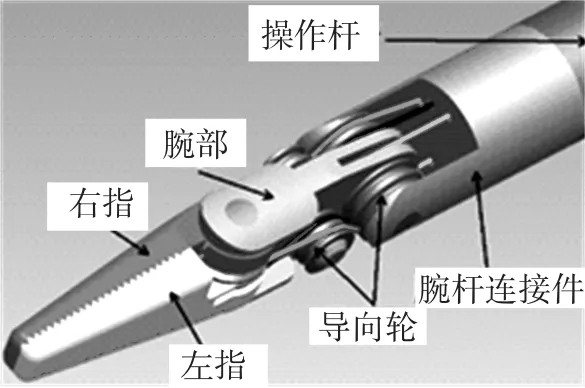
圖1 組織鉗末端結(jié)構(gòu)
簡化組織鉗模型如圖2所示,當(dāng)牽引手指的鋼絲保持不動時,令器械的腕部做俯仰運動,牽引手指鋼絲與腕部導(dǎo)向輪間的包角θ發(fā)生改變.鋼絲與手指固定,由于鋼絲保持不動,故包角的增加會引起手指的轉(zhuǎn)動.因此,腕部的運動會引起手指的運動,這種耦合運動在手術(shù)中會影響到醫(yī)生手術(shù)操作的精度.
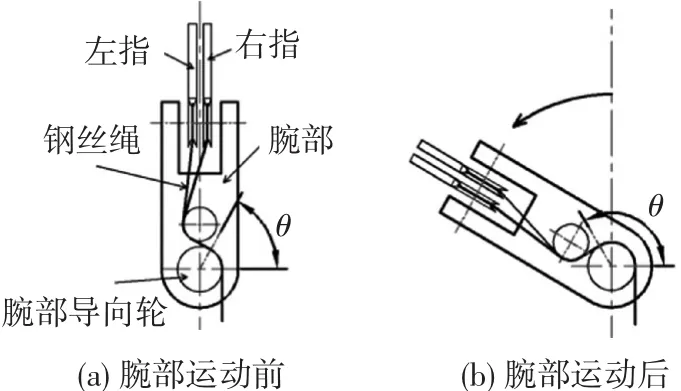
圖2 腕部運動引起的耦合運動
為使醫(yī)生在操作腕部運動過程中保持手指的穩(wěn)定,需要消除上述耦合運動.目前,主要的解耦方法為控制軟件解耦及機械結(jié)構(gòu)解耦.控制軟件解耦的原理為:腕部電機運動時,手指電機根據(jù)耦合情況而運動,從而補償手指傳動鋼絲因腕部運動而產(chǎn)生的有效長度變化[14].控制軟件解耦對傳動結(jié)構(gòu)間隙、加工裝配精度要求較高,且受驅(qū)動電機回差及控制系統(tǒng)時延等因素影響較大.因此,手指電機的實際補償量不易控制,會導(dǎo)致腕部運動過程中手指發(fā)生一定量的運動.基于行星輪系傳動原理的機械解耦方法為:腕部電機的運動能夠經(jīng)過行星輪系傳遞到手指上,從而對手指因腕部運動而產(chǎn)生的耦合運動進行補償[15-16];當(dāng)腕部不運動時,手指電機單獨通過行星輪系驅(qū)動手指運動.在實際應(yīng)用中,行星輪系機械解耦方法對行星架、齒輪及相關(guān)軸孔的加工、裝配精度要求較高,任何精度上的缺陷都會影響解耦效果.采用行星輪系傳動會增加傳動鏈中的負(fù)載,加大鋼絲傳動時所承載的拉力.
為去除手術(shù)器械的耦合運動,提高手術(shù)器械的操作性能,在分析耦合運動產(chǎn)生的基礎(chǔ)上,提出一種在腕部傳動軸中心打孔走線的微創(chuàng)手術(shù)器械設(shè)計方法.
2 無耦合運動手術(shù)器械設(shè)計
2.1 手術(shù)器械設(shè)計要求
為使手術(shù)器械在狹小的工作空間內(nèi)完成一系列的手術(shù)動作,要求所設(shè)計的手術(shù)器械不僅需具有較大的靈活性,而且還應(yīng)具有較高的運動精度.為減少患者創(chuàng)傷,器械操作桿直徑不大于10 mm,且器械要保持足夠大的夾持力來實現(xiàn)操作任務(wù).手術(shù)器械需具有快速更換功能,以便在術(shù)中更換不同種類的器械來完成微創(chuàng)手術(shù).手術(shù)器械需具有使用情況記錄功能,嚴(yán)格限制器械的使用次數(shù),保障器械使用的安全性、可靠性.手術(shù)器械的材料應(yīng)滿足醫(yī)學(xué)要求,且消毒、清洗方便.
2.2 無耦合運動手術(shù)器械結(jié)構(gòu)設(shè)計
依據(jù)手術(shù)器械結(jié)構(gòu)特點,將器械結(jié)構(gòu)劃分為末端執(zhí)行器、操作桿和傳動箱3個部分,如圖3所示.末端執(zhí)行器在微創(chuàng)手術(shù)中與組織直接接觸,進行相關(guān)的手術(shù)操作.操作桿為連接傳動箱與末端執(zhí)行器的構(gòu)件,傳動鋼絲經(jīng)其內(nèi)部通過,將傳動箱內(nèi)的運動傳遞給末端執(zhí)行器.傳動箱將電機的旋轉(zhuǎn)運動傳遞給鋼絲,為末端執(zhí)行器的運動提供動力.傳動箱內(nèi)部設(shè)計有動力離合裝置,可實現(xiàn)手術(shù)器械與電機驅(qū)動單元間的快速離合.傳動箱設(shè)計有電氣接口實現(xiàn)與機器人系統(tǒng)間的數(shù)據(jù)通信.
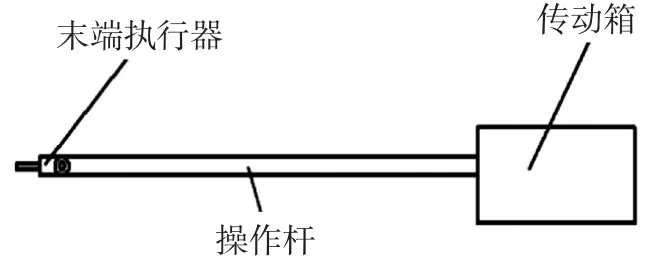
圖3 手術(shù)器械總體結(jié)構(gòu)
傳動箱結(jié)構(gòu)如圖4所示,4個傳動輪組分別與操作桿、腕部、左指、右指相連接,傳動輪組上的鋼絲預(yù)緊輪用于鋼絲預(yù)緊,傳動輪1的兩段鋼絲與操作桿端部連接,驅(qū)動操作桿旋轉(zhuǎn).其余傳動輪組的鋼絲經(jīng)過6個導(dǎo)向輪導(dǎo)向后,穿過操作桿與對應(yīng)的零件連接.
手術(shù)器械末端執(zhí)行器結(jié)構(gòu)如圖5所示,傳動輪2固連的兩段鋼絲與腕部相連接,實現(xiàn)手術(shù)器械末端執(zhí)行器的俯仰運動.為了消除器械運動過程中腕部和手指之間的耦合運動,將腕部傳動軸與鋼絲交涉部分設(shè)計為半圓柱形結(jié)構(gòu),并在其剩下的半圓柱截面上打通孔,使傳動輪3、傳動輪4固接的鋼絲通過對應(yīng)的通孔及相應(yīng)的導(dǎo)向輪與兩個手指連接.從圖6中可知手指傳動鋼絲的長度A—B—C—D—E在腕部俯仰運動前和運動后保持不變,消除了手術(shù)器械的耦合運動.
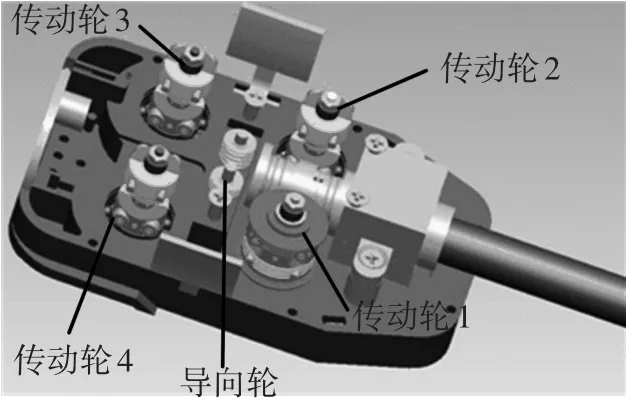
圖4 手術(shù)器械傳動箱模型

圖5 手術(shù)器械末端執(zhí)行器模型
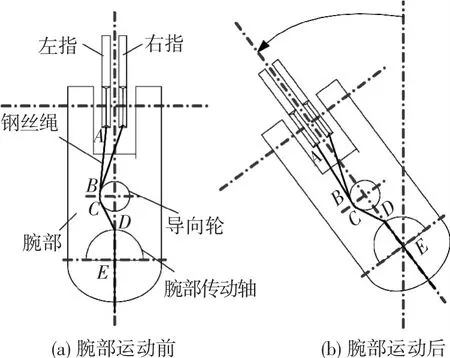
圖6 無耦合運動末端執(zhí)行器簡圖
2.3 無耦合運動手術(shù)器械功能設(shè)計
機械臂驅(qū)動單元上的上離合盤設(shè)計有兩個非對稱的定位孔,手術(shù)器械傳動箱外側(cè)的下離合盤設(shè)計有兩個非對稱的定位柱,如圖7所示.將手術(shù)器械通過傳動箱兩邊的凸緣和驅(qū)動單元的滑槽相配合后,就將4個上離合盤下壓.當(dāng)電機帶動上離合盤旋轉(zhuǎn)至上下離合盤配合位置時,彈簧推動上離合盤彈起,定位孔與定位柱相配合,上離合盤帶動下離合盤一起轉(zhuǎn)動,實現(xiàn)電機動力的傳遞.當(dāng)要更換手術(shù)器械時,只需捏住手術(shù)器械傳動箱兩邊的夾塊,使手術(shù)器械驅(qū)動單元上的浮動盤向下運動,帶動上離合盤回縮,進而使上下離合盤分離,將手術(shù)器械從驅(qū)動單元中拆卸下來.
為了實現(xiàn)器械的使用信息記錄功能,記憶芯片采用AT24C1024,能掉電記憶,工作電壓2.7~5.5 V,內(nèi)存有1 024 kB,可允許10萬次讀寫操作.由于器械驅(qū)動單元與器械接口采用按壓式的接口設(shè)計,因此器械記憶芯片的電氣觸點采用可按壓的彈簧觸點,既保證接觸良好,又使器械容易更換.記憶芯片通過I2C總線和STC89C52芯片進行通信.當(dāng)器械安裝到驅(qū)動單元上時,器械彈簧觸點信號接通,STC89C52芯片上電讀取記憶芯片的使用次數(shù),并判斷使用次數(shù)是否達到上限值,達到上限值則通過串口發(fā)送報警信息.如果沒有達到上限值,則將使用次數(shù)增加1次后,將數(shù)據(jù)寫入記憶芯片.
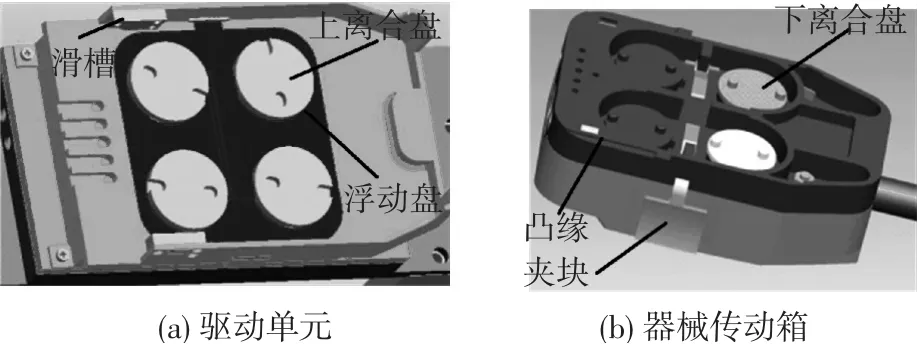
圖7 手術(shù)器械接口模型
2.4 無耦合手術(shù)器械實現(xiàn)
研制的無耦合運動手術(shù)器械如圖8所示.手術(shù)端蓋上設(shè)計有小孔,可以插入電凝的導(dǎo)線和吹孔的導(dǎo)管,進行電凝手術(shù)操作或清潔器械末端的工作.
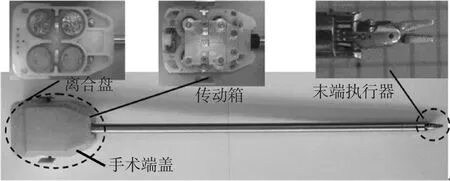
圖8 無耦合運動手術(shù)器械圖片
3 主從控制方法
3.1 手術(shù)器械運動學(xué)求解
研制的無耦合運動手術(shù)器械具有4個自由度,因為開合自由度由主手手柄上的夾持機構(gòu)直接進行關(guān)節(jié)量控制,因此可將手術(shù)器械簡化為三自由度模型.采用D-H方法分析手術(shù)器械的正運動學(xué),如圖9所示.手術(shù)器械連桿參數(shù)及關(guān)節(jié)變量如表1所示.將θ的正弦、余弦簡化表示:si= sinθi,ci=cosθi,最終得到器械末端點的齊次變換矩陣:
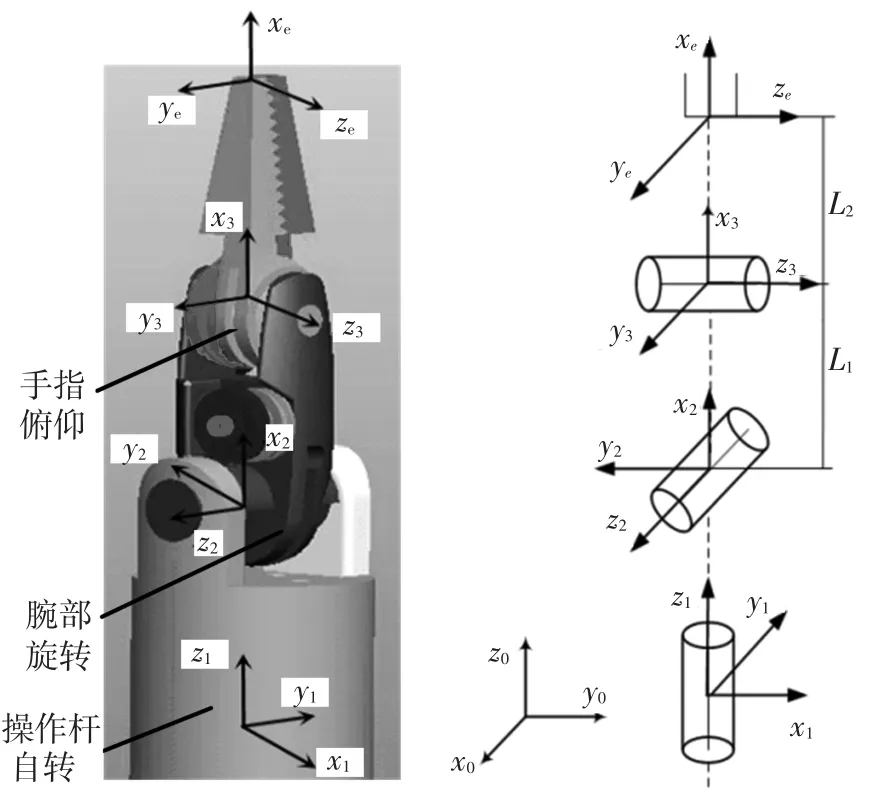
圖9 手術(shù)器械參考坐標(biāo)系

式中:Te為器械末端點的齊次變換矩陣,T為器械各關(guān)節(jié)的齊次變換矩陣,Ps表示器械末端點的位置矢量,ns、os、as分別為器械末端點處相互垂直的單位向量.
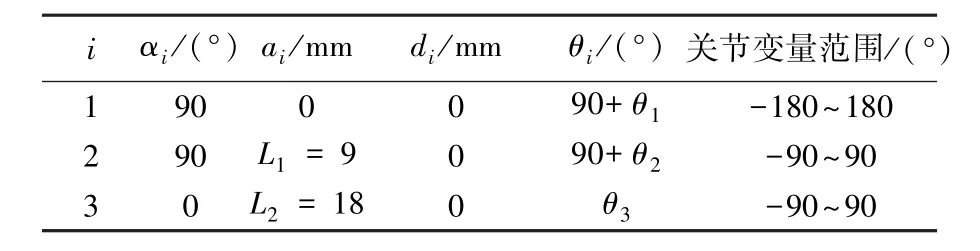
表1 手術(shù)器械運動學(xué)參數(shù)表
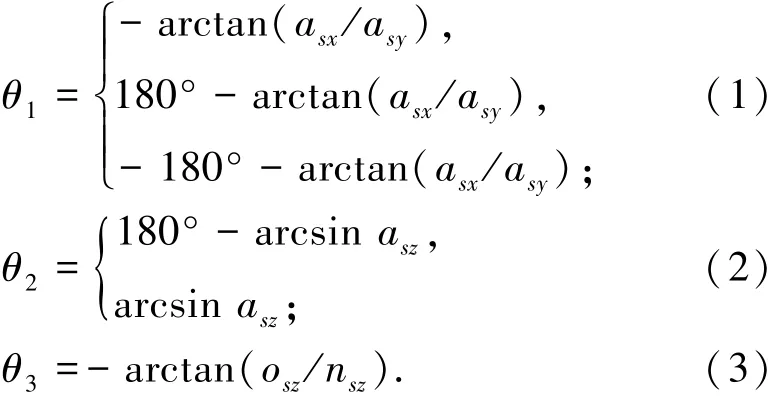
最終得到手術(shù)器械的運動學(xué)逆解為
3.2 主手運動學(xué)求解
主手采用Force Dimension公司的omega 7.0設(shè)備,其末端3個旋轉(zhuǎn)關(guān)節(jié)的軸線交于一點,主手手柄上有專用的夾持機構(gòu)實現(xiàn)對器械開合自由度的控制.在手術(shù)器械的控制中,為使器械運動能夠跟隨醫(yī)生手部的動作,要求器械末端手指的姿態(tài)要和主手手柄的姿態(tài)保持一致,如圖10所示.分析主手正運動學(xué)得到主手手柄的姿態(tài)矩陣:
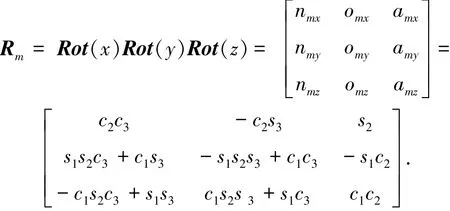
式中:Rm為主手手柄的姿態(tài)矩陣,Rot為繞坐標(biāo)軸旋轉(zhuǎn)的旋轉(zhuǎn)矩陣,nm,om,am分別為主手手柄處相互垂直的單位向量.
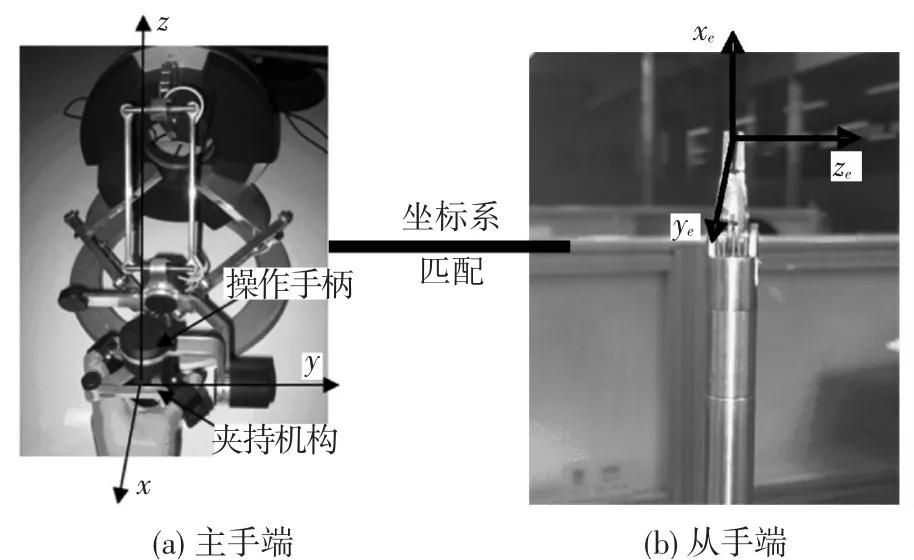
圖10 主手設(shè)備及自由度圖示
為方便醫(yī)生操作主手完成對器械末端的控制,可將主手手柄類比為器械末端的手指,器械末端手指的姿態(tài)時刻跟隨主手手柄的姿態(tài),從而完成對器械末端的主從控制.由于固連在器械手指和主手手柄上的坐標(biāo)系不一致,為實現(xiàn)上述控制方法,需要對兩個坐標(biāo)系進行匹配,得到以下的對應(yīng)關(guān)系:

這樣就可獲得器械末端手指的姿態(tài),再利用式(1)~(3)得到手術(shù)器械每個關(guān)節(jié)的運動角度,進而控制電機實現(xiàn)器械手指對主手手柄姿態(tài)的跟隨.
4 實驗研究
4.1 器械耦合運動測試
借助NDI公司的Optotrak Certus三維運動測量系統(tǒng)對手術(shù)器械耦合運動進行測試,將3個Marker點分別粘附到器械的腕部及兩個手指上,如圖11(a)所示.當(dāng)控制器械腕部單獨運動時,記錄3個Marker點的空間位置.如果3個Marker點的空間位置相對不變,說明器械手指相對于腕部沒有產(chǎn)生耦合運動.實驗結(jié)果如圖11(b)、(c)、(d)、(e)所示,橫坐標(biāo)n為Optotrak Certus系統(tǒng)在實驗過程中接收到Marker點空間坐標(biāo)變化數(shù)據(jù)量,縱坐標(biāo)d1、d2、d3為3個Marker點間的距離.在器械腕部單獨運動過程中3個Marker點之間的距離d1、d2、d3變化很小,考慮到器械加工、裝配誤差及腕部運動過程中3個Marker點同Optotrak Certus系統(tǒng)攝像機之間映射角度變化而導(dǎo)致d1、d2、d3數(shù)值的變化,可認(rèn)為器械腕部與兩個手指之間位置相對不變,器械在腕部運動過程中是無耦合運動產(chǎn)生的.
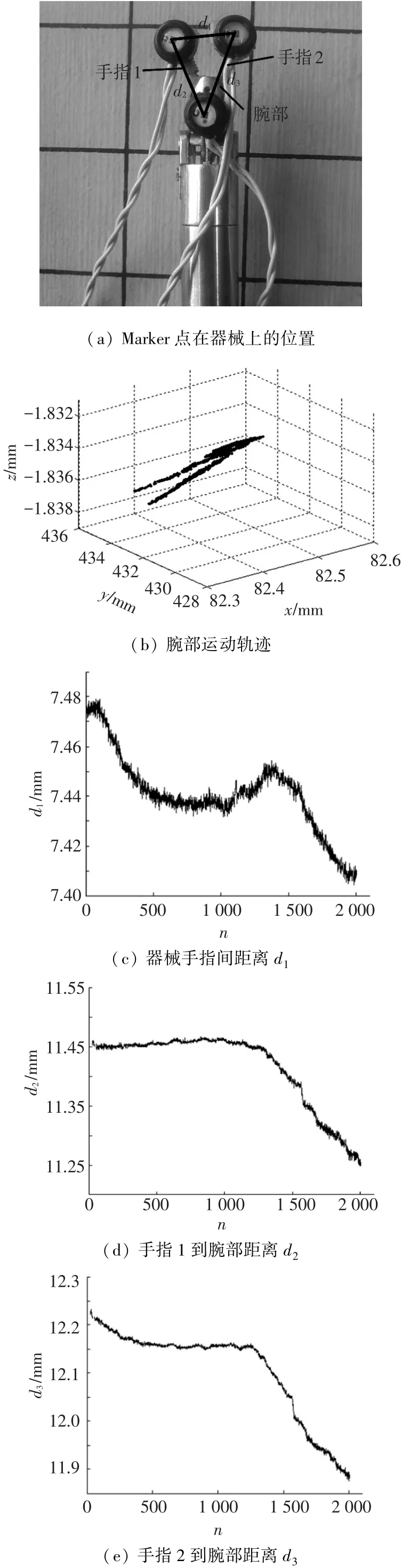
圖11 器械耦合運動測試結(jié)果
4.2 主從控制實驗
為驗證手術(shù)器械性能,構(gòu)建了主從控制平臺. PC104用于上位機控制,采用CAN總線實現(xiàn)上位機與各驅(qū)動器間的通信,手術(shù)器械安裝在驅(qū)動單元上,驅(qū)動單元上的4個電機通過鋼絲傳動方式來驅(qū)動器械4個自由度運動,操作者通過操作主手來控制手術(shù)器械運動.實驗中將主手手柄當(dāng)前姿態(tài)通過式(4)轉(zhuǎn)換為器械末端手指的姿態(tài),再利用式(1)~(3)得到手術(shù)器械末端各關(guān)節(jié)所需的運動角度,驅(qū)動電機使器械末端各關(guān)節(jié)到達相應(yīng)的運動角度后,實現(xiàn)了對主手手柄姿態(tài)的跟隨.由于所設(shè)計的手術(shù)器械不存在耦合運動,因此不需要補償由器械腕部運動而引起手指的運動.
5 結(jié) 論
1)在分析微創(chuàng)手術(shù)器械耦合運動產(chǎn)生原理的基礎(chǔ)上,提出了一種在腕部傳動軸中心打孔走線的微創(chuàng)手術(shù)器械設(shè)計方法,最終研制出一種無耦合運動的微創(chuàng)手術(shù)器械.
2)研制的無耦合運動手術(shù)器械可實現(xiàn)術(shù)中快速更換,具有使用信息記錄功能,增加了手術(shù)器械在機器人微創(chuàng)手術(shù)中的適應(yīng)性和安全性.
3)在求解器械和主手運動學(xué)的基礎(chǔ)上,給出了手術(shù)器械的主從控制方法,該方法可以使醫(yī)生更易于對器械進行主從式操作.
4)構(gòu)建了手術(shù)器械主從控制平臺,開展了手術(shù)器械耦合運動測試及主從控制實驗研究,結(jié)果表明了所研制的手術(shù)器械消除了耦合運動,具有較好的主從操作性能.
[1]TAYLOR R H,STOIANOVICI D.Medical robotics in computer-integrated surgery[J].IEEE Transactions on Robotics and Automation,2003,19(5):765-781.
[2]杜志江,孫立寧,富歷新.外科手術(shù)機器人技術(shù)發(fā)展現(xiàn)狀及關(guān)鍵技術(shù)分析[J].哈爾濱工業(yè)大學(xué)學(xué)報,2003,35(7):773-777.
[3]SIM H G,YIP S K,CHENG C W.Equipment and technology in surgical robotics[J].World Journal of Urology,2006,24(2):128-135.
[4]杜志江,孫立寧,富歷新.醫(yī)療機器人發(fā)展概況綜述[J].機器人,2003,25(2):182-187.
[5]BROEDERS I,RUURDA J.Robotics revolutionizing surgery:the intuitive surgical“Da Vinci”system[J]. Industrial Robot,2001,28(5):387-391.
[6]GULATIS,JUNG E H,KAPOOR C.Execution engine for robotic surgery support functions in an unmanned operating room[C]//IEEE International Conference on Robotics and Automation.Jacksonville:IEEE,2007: 404-409.
[7]NOONAN D P,MYLONASG P,DARZIA,etal.Gaze contingent articulated robot control for robot assisted minimally invasive surgery[C]//IEEE/RSJ International Conference on Intelligent Robotics and Systems.Nice:IEEE,2008:1186-1191.
[8]GRACE K.Suturing articulating device for tissue and needle manipulation during minimally invasive endoscopic procedure:Worldpatent,WO 00/59384 A1[P].2001-11-05.http://apps.webofknowledge.com.
[9]MINOR M,MUKHERJEE R.A dexterous manipulator for minimum invasive surgery[C]//IEEE International Conference on Robotics and Automation.Detroit:IEEE,1999:2057-2064.
[10]王樹新,王曉菲,張建勛,等.輔助腹腔微創(chuàng)手術(shù)的新型機器人“妙手A”[J].機器人技術(shù)與應(yīng)用,2011(4):17-21.
[11]SANG Hongqiang,WANG Shuxin,LI Jianmin,et al. Control design and implementation of a novel masterslave surgery robot system,MicroHand A[J].The International Journal of Medical Robotics and Computer Assisted Surgery,2011(7):334-347.
[12]MA Ruqi,WU Dongmei,YAN Zhiyuan,et al.Research and development of micro-instrument for laparoscopic minimally invasive surgical robotic system[C]//IEEE International Conference on Robotics and Biomimetics. Tianjin:IEEE,2010:1223-1228.
[13]馬如奇.微創(chuàng)外科手術(shù)機器人執(zhí)行系統(tǒng)研制及其控制策略研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2013: 28-31.
[14]SANG Hongqiang,MENG Jianjun,YUN Jintian. Kinematic analysis of a class of multi-DOF tendondriven minimally invasive surgical instruments[C]//IEEE International Conference on Computer Science and Network Technology.Harbin:IEEE,2011:607-612.
[15]趙旭東.腹腔微創(chuàng)手術(shù)機器人手術(shù)器械的結(jié)構(gòu)設(shè)計[D].哈爾濱:哈爾濱工業(yè)大學(xué),2010:17-21.
[16]FENG Mei,F(xiàn)U Yili,PAN Bo,et al.An improved surgical instrumentwithout coupled motions that can be used in robotic-assisted minimally invasive surgery[J]. Proceedings of the Institution of Mechanical Engineers Part H-Journal of Engineering in Medicine,2012,226(H8):623-630.
(編輯楊 波)
Design and experiment of surgical instrument w ithout coupled motions for m inimally invasive surgery
PAN Bo1,2,F(xiàn)U Yili1,QIU Xueqin1,XU Dianguo2
(1.State Key Laboratory of Robotics and System,Harbin Institute of Technology,150080 Harbin,China;2.School of Electrical Engineering and Automation,Harbin Institute of Technology,150001 Harbin,China)
To increase the operation dexterity of surgical instruments in minimally invasive surgery(MIS),and improve manipulation performance ofmaster-slave control,a novel surgical instrument without coupled motions used in MIS is designed.On the basis of analyzing the formation principle of coupled motions and existingmethods of coupled motions elimination,a design method that steel wire crosses the centre of wrist shaft in the radial direction for surgical instrument used in MIS is proposed.The developed instrumenthas four DOFs and is driven by means of steel wire.Besides that,the instrument can realize quick replacement and useful information record aswell.After researching kinematics of surgical instrument and master,master-slave control method for surgical instrument is proposed and experiments platform for master-slave control is established.The experimental results indicate that the position of instrument′s wrist in relation to two fingers remains unchanged in the process of surgical instrument's wristmoving individually,which means that the developed surgical instrument eliminates coupled motions and has good manipulation performance in masterslave control.The design method that steel wire crosses the centre of wrist shaft in the radial direction for surgical instrument used in MIS can eliminate coupled motions,and the developed surgical instrument is beneficial to surgical operation in MIS.
minimally invasive surgery;robot;control;instrument;coupled motions
TP241
A
0367-6234(2014)09-0019-06
2013-10-24.
國家高技術(shù)研究發(fā)展計劃資助項目(2012AA041601);中央高校基本科研業(yè)務(wù)費專項資助(HIT.NSRIF.2013052).
潘 博(1981—),男,講師;付宜利(1966—),男,教授,博士生導(dǎo)師;徐殿國(1960—),男,教授,博士生導(dǎo)師.
潘 博,panbo4034@163.com.
