電動汽車單軸機電復合制動方向穩定性分析
2014-06-27 05:46:25陳燎馬躍超盤朝奉
重慶理工大學學報(自然科學) 2014年3期
陳燎,馬躍超,盤朝奉,b
(江蘇大學a.汽車與交通工程學院;b.汽車工程研究院,江蘇鎮江 212013)
電動汽車單軸機電復合制動方向穩定性分析
陳燎a,馬躍超a,盤朝奉a,b
(江蘇大學a.汽車與交通工程學院;b.汽車工程研究院,江蘇鎮江 212013)
制動時汽車的方向穩定性是評價汽車制動性能的指標之一。針對電動汽車單軸機電復合制動方向的穩定性問題,建立了在機電復合制動時利用附著系數的數學模型;在Matlab中利用M文件仿真,根據ECE R13制動法規對某電動汽車不同軸下的機電復合制動方向的穩定性進行分析。仿真結果表明:前驅型的電動汽車機電復合制動在制動效率和方向穩定性方面優于后驅型電動汽車。
電動汽車;再生制動;機電復合制動
當今世界面臨著能源短缺和環境污染的嚴峻挑戰,純電動車等新能源汽車日漸成為當前汽車行業研發的重點。因此,復合制動系統在各類新能源汽車研究中越來越受到重視。復合制動系統由電機制動和傳統機械制動2部分組成,采用復合制動系統可減少機械制動的使用頻率,提高傳統制動系統的使用壽命,又可以通過再生制動系統將原本摩擦耗散的能量部分回收再利用[1-3]。由于電機制動力受到許多條件(如車速、蓄能原件允許的最大充電電流等)的約束,使得單純的電制動的制動能力有限,因此在較大的制動強度下,需要電制動和機械制動配合使用才可滿足制動性能要求。這種機電復合制動的形式會使汽車制動時的方向穩定性產生變化。例如對于前輪驅動的汽車,電制動力加在前輪上,雖然制動時前輪先抱死拖滑是一種穩定工況,但會喪失轉向能力,并且由于電制動力與車速有關,有可能使前軸利用附著系數曲線超過ECE R13的制動法規的標準,從而引起制動效率的下降。對于后輪驅動的汽車,電制動產生的阻力矩加在后輪上,增加了后輪較前輪先抱死的趨勢,增大了后軸出現側滑的可能,是一種不穩定工況[4]。
1 再生制動特點及制動力分配關系
永磁直流無刷電機由于具有調速范圍寬、功率密度好等優點,成為迄今為止最理想的電動汽車動力源。再生制動時,當電機實際轉速沒有下降到額定轉速nN之前,電機以額定功率制動。當電機轉速下降到額定轉速nN之后,電機先以額定轉矩制動,但當電機轉速降到一定值時,由于反電動勢過低而導致再生制動效率低下,電制動力為零[5-6]。
復合制動的制動力分配關系如圖1所示。采用這種分配關系是將驅動輪上的部分機械制動力矩由電制動力矩代替,而前后輪的制動力矩和總制動力矩與原來沒有再生制動系統的汽車相比無變化,能在保持發揮最大電制動力矩的同時使駕駛員的制動感覺與駕駛傳統車時相似[7-8]。
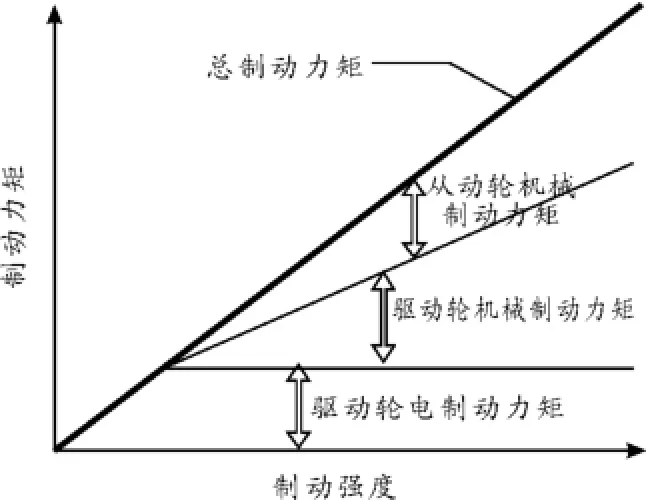
圖1 復合制動下制動力分配關系
2 機電復合制動下前后軸利用附著系數數學模型
2.1 利用附著系數
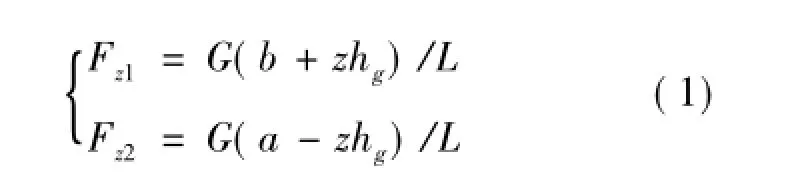
忽略旋轉質量產生的慣性力偶矩以及車輪邊滾邊滑的過程,汽車制動時地面對前后輪法向作用力為

式(2)中:Fxb1,Fxb2分別為對應于相應法向作用力的地面制動力。
顯然,利用附著系數越接近制動強度z,地面的附著條件利用得越充分,汽車制動力分配的合理程度就越高[9-10]。
2.2 電制動力
由電機再生制動時的典型特征可知電制動力矩為
式(1)中:hg為質心高度;G為汽車重力;L為軸距;a為質心距前軸距離;b為質心距后軸距離。
利用附著系數定義為
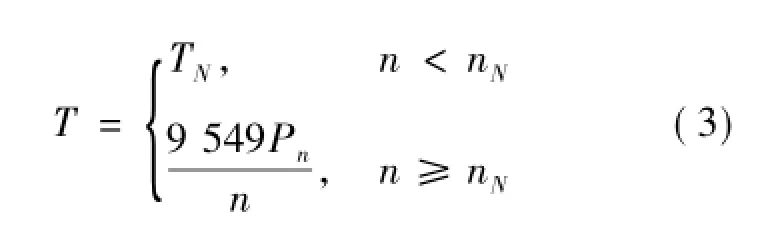
式(3)中:TN為電機額定轉矩;n為電機實際轉速; nN為電機額定轉速;Pn為電機額定功率。
對應的驅動輪上的電制動力為

式(4)中:i為變速比;r為車輪的滾動半徑;η為傳動效率。
電動機轉速與車速ua的關系為ua=0.377rn,可以推導出

由式(3)~(5)可得:

2.3 機電復合制動下的利用附著系數φi
制動器制動力分配系數β可表示為

式(7)中:Fu1為前輪機械制動力;Fu為總機械制動力。若前輪為驅動輪,則前輪上的總制動力為Fu11=Fu1+Fre
當汽車制動時,前輪將要抱死或前后輪同時抱死拖滑時,有

則復合制動下前軸利用附著系數為
其中z=du/(g×dt)為制動強度。由式(2)、(8)、(9)得

復合制動下后軸利用附著系數為
若后輪為驅動輪,后輪上的總制動力為Fu22=Fu2+Fre,則相應地后輪抱死或前后輪同時抱死時前后輪利用附著系數為φf,φr。
同理可得:

3 單軸機電復合制動方向穩定性仿真分析
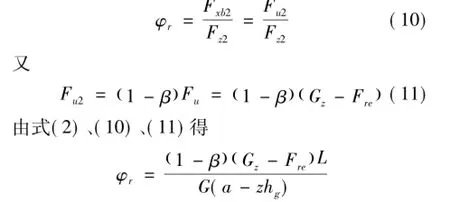
為了保證制動時汽車的方向穩定性和足夠的制動效率,聯合國歐洲經濟委員會制定的ECE R13制動法規對雙軸汽車前、后輪制動器的制動力提出了明確要求:對于φ在0.2~0.8的各種車輛,要求制動強度z≥0.1+0.85(φ-0.2),車輛在各種裝載狀態下,前軸利用附著系數曲線應在后軸利用附著系數曲線之上,以保證前軸先抱死,防止后軸出現拖滑;對于轎車而言,制動強度在0.3~0.5,在后軸利用附著系數曲線不超過直線φ=z+0.05的條件下,允許后軸利用附著系數曲線在前軸利用附著系數曲線之上(見圖2)[11-13]。
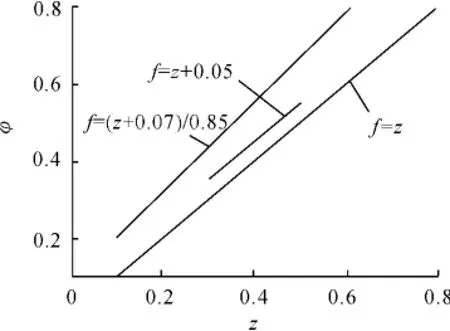
圖2 ECE法規轎車的制動力分配
以某微型電動汽車(不考慮質心位置變化)為例。該車滿載質量m=830 kg,質心高度hg=0.4 m,軸距L=1.765 m,質心至前軸距離a=0.79 m,質心至后軸距離b=0.975 m,減速器減速比i= 6.515,車輪滾動半徑r=0.244 6 m,最高車速為60 km/h,電機采用永磁直流無刷電機,電機額定功率pn=6 kW,額定扭矩Tn=20 N·m,電機額定轉速nN=2 800 r/min,傳動系傳遞效率η=0.9。
在Matlab中利用M文件對修正后利用附著系數建立模型,并進行仿真分析[14-15]。
由圖3、4可知:當采用前輪驅動時,無論在恒轉矩或恒功率狀態下制動,前軸利用附著系數曲線φf線都在后軸利用附著系數曲線φr線的上方,均滿足φ≤(z+0.07)/0.85,保證了制動過程中前軸先抱死,防止后軸先出現拖滑;在恒功率制動的狀態下,車速在60 km/h時的φf,φr線都比車速在45 km/h時的φf,φr線更接近φ=z線,使得汽車在高速狀態下制動時地面附著條件得到更加充分的利用。

圖3 前輪驅動恒功率制動下制動強度與利用附著系數的關系
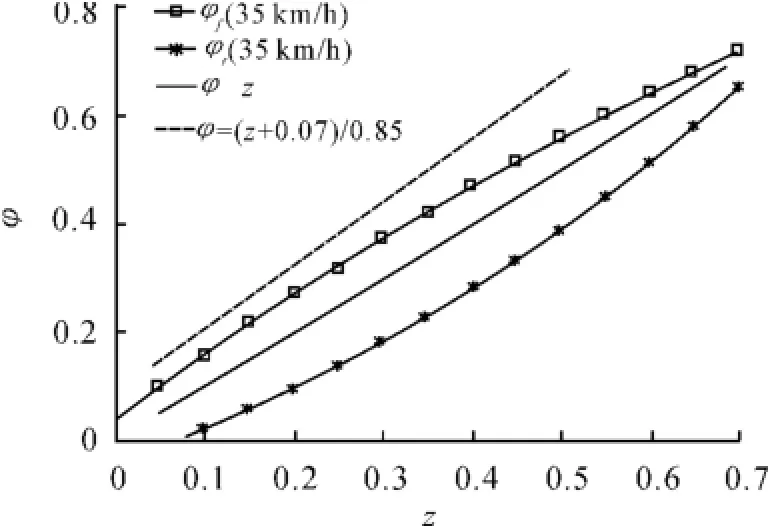
圖4 前輪驅動恒轉矩制動下制動強度與利用附著系數的關系
由圖5、6可知:當采用后輪驅動時,無論在恒轉矩或恒功率狀態下制動,前軸利用附著系數曲線φf線都在后軸利用附著系數曲線φr線的下方,且在中低速、低制動強度下,φr線位于φ≤(z+ 0.07)/0.85線的上方,不滿足ECE制動法規的要求,在制動過程中易出現后軸先抱死的不穩定工況。
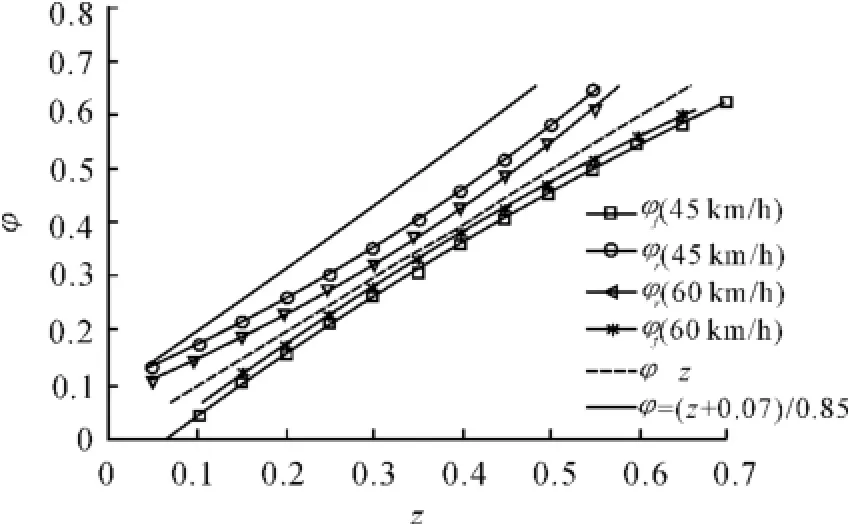
圖5 后輪驅動恒功率制動下制動強度與利用附著系數的關系

圖6 后輪驅動恒轉矩制動下制動強度與利用附著系數的關系
4 結束語
微型電動汽車采用單軸機電復合制動時,采用前軸機電復合制動有利于前軸先抱死,且前軸利用附著曲線沒有超過ECE R13制動法規的規定標準,具有良好的制動效率;當采用后軸機電復合制動時,后輪較前輪先抱死,在高速制動時易發生后軸側滑,此時汽車常會因發生不規則的急劇回轉運動而失去控制,這是一種需避免的不穩定工況。因此,從制動效能和制動時的方向穩定性來看,前軸機電復合制動優于后軸機電復合制動。
[1]李佩衍,易翔翔,候福深.國外電動汽車發展現狀及對我國電動汽車發展的啟示[J].北京工業大學學報,2004,30(3):49-55.
[2]李秀芬,雷躍峰.電動汽車關鍵技術發展綜述[J].上海汽車,2006(1):8-10.
[3]陳慶樟,何仁,商高高.汽車能量再生制動技術研究現狀及其關鍵技術[J].拖拉機與農用運輸車,2008,35 (6):9-11.
[4]雷驚雷,張占軍,吳立人,等.電動車用電源及其發展戰略[J].電源技術,2001,25(1):40-46.
[5]張琛.直流無刷電機原理及應用[M].北京:機械工業出版社,2004:103-105.
[6]Cikanek S R,Bailey K E.Regenerative Braking System for a Hybrid Electric Vehicle[C]//Proceeding of the A-merican control conference.Anchorage:[s.n.],2002,4: 3129-3134.
[7]鄒廣才,羅禹貢,邊明遠.并聯式HEV制動能量回收控制策略的仿真研究[J].汽車技術,2005,21(7):14-17.
[8]陳清泉,孫逢春.混合電動車輛基礎[M].北京:北京理工大學出版社,2001:109-118.
[9]余志生.汽車理論[M].北京:機械工業出版社,2009: 166-167.
[10]Zhao Guozhu,Wei Minxiang.Stability of Composite Braking Produced by Retarder and Braking System[J].Journal of China Ordnance,2011,7(1):42-47.
[11]Jalil N,Kheir N A,Salman M.A Rule based Energy Management Strategy for a Series Hybrid Vehicle[C]// Proceedings of the American Control Conference.[S. l.]:[s.n.],1997,1:689-693.
[12]劉衛國.Matlab程序設計教程[M].北京:中國水利水電出版社,2005:76-79.
[13]徐中明,胡康博,張志飛,等.基于Adams和Matlab的汽車EPS控制聯合仿真[J].重慶理工大學學報:自然科學版,2010,24(10):7-12.
[14]曹明柱,馮能蓮.電動汽車的建模仿真[J].安徽農業大學學報,2006,33(2):277-280.
[15]張京明,王仕偉,程志剛,等.混合動力汽車再生制動系統的建模與仿真[J].計算機仿真,2008,25(7):268-272.
(責任編輯 劉舸)
Braking Direction Stability of Uniaxial Electro-mechanical
Brake for Electric Vehicle
CHEN Liaoa,MA Yue-chaoa,PAN Chao-fenga,b
(a.School of Automobile and Traffic Engineering;b.Automotive Engineering Research Institute,Jiangsu University,Zhenjiang 212013,China)
The direction stability is one of indices to evaluate automobile’s brake performance.A mathematical model of attachment coefficient was built for the direction stability of electric vehicle uniaxial electro-mechanical brake.Mathematical model was simulated on matlab/M file,and analyzed the direction stability of an EV’s electro-mechanical brake under different axles according to ECE R13.The simulation results show that the front drive EV is better than the rear drive EV in the respect of braking efficiency and direction stability.
electric vehicle;regenerative braking;electro-mechanical brake
U469.72
A
1674-8425(2014)03-0006-04
10.3969/j.issn.1674-8425(z).2014.03.002
2013-09-11
國家863節能與新能源汽車重大項目(2012AA111401);江蘇省自然科學基金資助項目(BK2011489)
陳燎(1963—),男,江蘇鎮江人,博士研究生,副教授,碩士生導師,主要從事汽車電子及智能交通系統方面的研究;馬躍超(1987—),男,浙江湖州人,碩士,主要從事汽車電控與仿真方面的研究。
陳燎,馬躍超,盤朝奉.電動汽車單軸機電復合制動方向穩定性分析[J].重慶理工大學學報:自然科學版,2014(3):6-9.
format:CHEN Liao,MA Yue-chao,PAN Chao-feng.Braking Direction Stability of Uniaxial Electro-mechanical Brake for Electric Vehicle[J].Journal of Chongqing University of Technology:Natural Science,2014(3):6-9.
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
中學生數理化·七年級數學人教版(2021年11期)2021-12-06 05:38:48
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
汽車與安全(2019年9期)2019-11-22 09:48:03
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
數學小靈通·3-4年級(2017年6期)2017-06-22 11:28:50
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50