
基于車輛動態(tài)曲線通過性能的主要懸掛參數(shù)優(yōu)化
2014-06-28 11:43:12李建明
城市軌道交通研究 2014年11期
關(guān)鍵詞:優(yōu)化
李建明
(湖北交通職業(yè)學(xué)院汽車系,430079,武漢∥講師)
城市軌道交通車輛懸掛系統(tǒng)主要起著車體和軌道間傳遞力的作用,其參數(shù)值的變化直接影響到車輛運行的安全性、平穩(wěn)性和曲線通過性能,為此,諸多學(xué)者進行了相關(guān)研究。文獻[1]研究了懸掛參數(shù)對車輛曲線通過能力的影響,改變懸掛參數(shù)提高了過彎道時的穩(wěn)定性;文獻[2]通過優(yōu)化一系懸掛彈簧的剛度和牽引桿的剛度參數(shù)提高了地鐵車輛的垂向動力學(xué)性能;文獻[3]、[4]分別改變懸掛系統(tǒng)中某一個懸掛參數(shù)值,來研究一、二系懸掛各參數(shù)值分別對車輛動力學(xué)性能的影響;文獻[5]將橫向和縱向懸掛參數(shù)綜合考慮進行優(yōu)化提高了車輛橫向穩(wěn)定性。
1 仿真分析
1.1 模型的建立
車輛動力學(xué)模型(如圖1)的建立是在動力學(xué)軟件SIMPACK 中完成的。車輛模型由車體、前后轉(zhuǎn)向架和4 個輪對組成。軌道模型按照設(shè)計規(guī)范建立,分為直線段1、前緩和曲線段、有固定半徑和超高的曲線段、后緩和曲線段、直線段2(具體參數(shù)見表1)。軌道最大欠超高取75 mm。由此線路條件決定的最高行車速度為70 km/h。本文仿真計算采用運行車速60 km/h。

圖1 車輛動力學(xué)模型
1.2 仿真分析
車輛懸掛系統(tǒng)分為一系懸掛和二系懸掛,由軸箱定位裝置、空氣彈簧、扭桿彈簧、牽引拉桿和橫向止擋等組成。本文主要研究軸箱參數(shù)和空氣彈簧參數(shù)對動態(tài)曲線通過的影響,并對這些參數(shù)實現(xiàn)優(yōu)化。為了定性研究各懸掛參數(shù)對動態(tài)曲線通過性能的影響規(guī)律,進行動力學(xué)仿真分析時未考慮加軌道激勵的作用。通過變參數(shù)仿真運算發(fā)現(xiàn),軸箱縱向定位剛度、垂向定位剛度和空氣彈簧縱橫向剛度對輪軌橫向力、脫軌系數(shù)和輪減載率的影響較大(如圖2~4所示)。由此,降低一系軸箱定位剛度和空氣彈簧縱橫向剛度,會使最大輪軌橫向力、脫軌系數(shù)和輪重減載率均減小,可以有效提高車輛動態(tài)曲線通過性能,但過小 的剛度值不利于車輛運行的穩(wěn)定性和平穩(wěn)性[6]。

表1 軌道模式參數(shù)
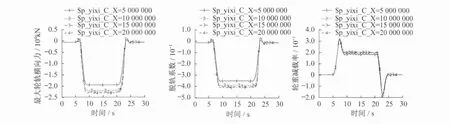
圖2 不同軸箱縱向定位剛度對橫向力、脫軌系數(shù)和輪重減載率的影響
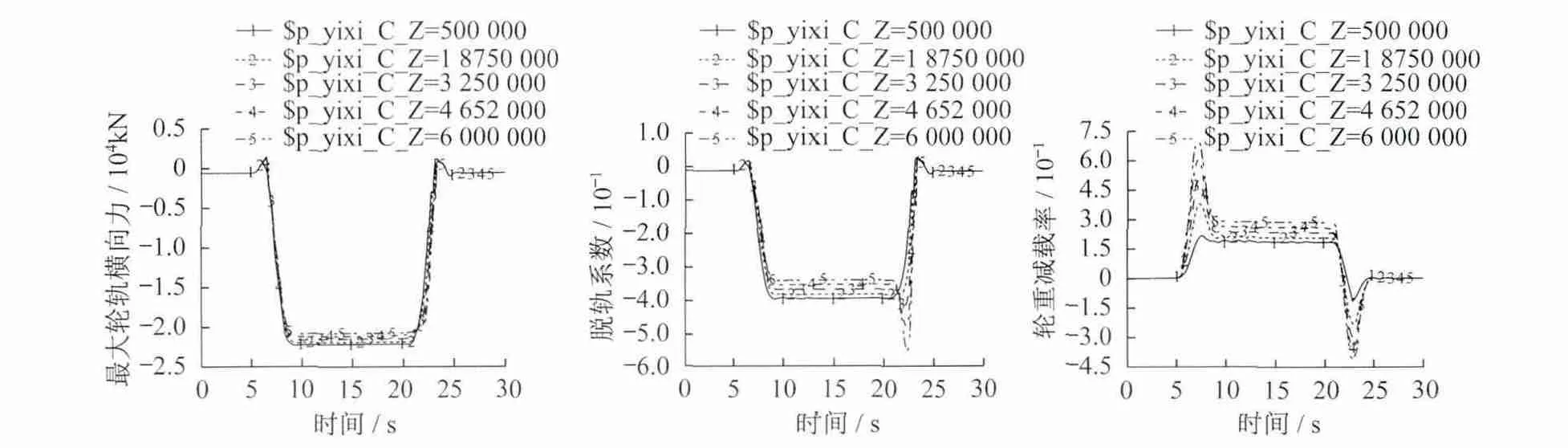
圖3 不同軸箱垂向定位剛度對橫向力、脫軌系數(shù)和輪重減載率的影響

圖4 不同空氣彈簧縱橫向剛度對橫向力、脫軌系數(shù)和輪重減載率的影響
2 懸掛參數(shù)優(yōu)化
本研究利用優(yōu)化軟件和動力學(xué)分析軟件聯(lián)合仿真實現(xiàn)懸掛參數(shù)的優(yōu)化設(shè)計,優(yōu)化過程采用遺傳算法實現(xiàn)自動化多目標(biāo)尋優(yōu),大大提高了設(shè)計效率。
2.1 設(shè)計變量和目標(biāo)函數(shù)的選擇
設(shè)計變量選取9 個主要懸掛參數(shù):一系軸箱彈簧橫向剛度,縱向剛度,垂向剛度,垂向阻尼,二系空氣彈簧橫向剛度,縱向剛度,垂向剛度,橫向阻尼,垂向阻尼。每個懸掛參數(shù)的初始值及上、下限如表2所示。目標(biāo)函數(shù)是評價每個可行優(yōu)化方案好壞的標(biāo)準(zhǔn),本文選用脫軌系數(shù)、輪重減載率和輪軌橫向力作為目標(biāo)函數(shù),評價車輛動態(tài)曲線通過性能。
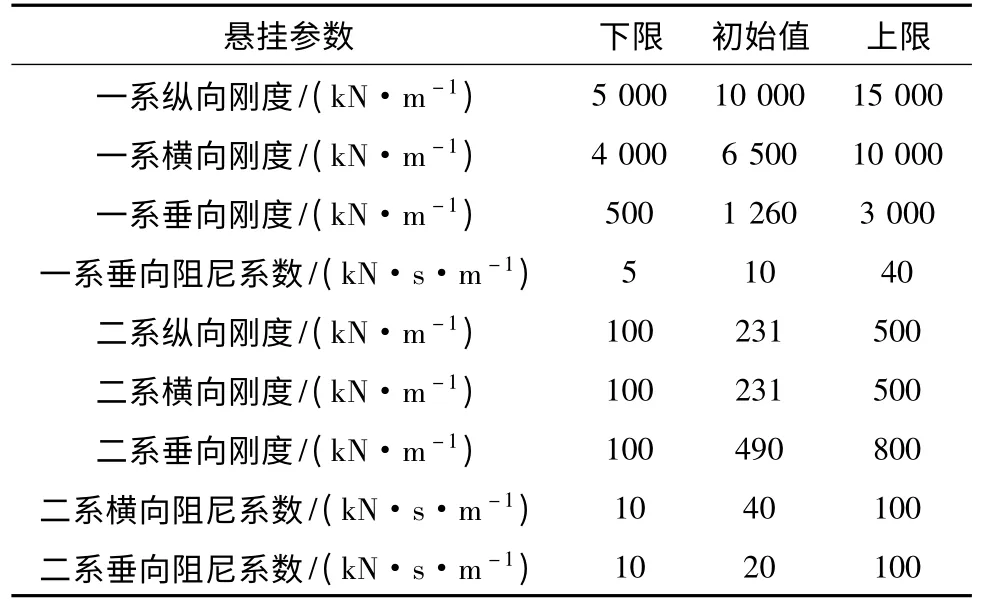
表2 設(shè)計變量
2.2 優(yōu)化設(shè)計流程的搭建
整個模型的搭建如圖5所示。Input 是動力學(xué)模型文件,輸入部分;SIMPACK 為批處理文件,負責(zé)后臺起動動力學(xué)軟件并進行仿真計算;Output 是計算完成后的結(jié)果輸出文件;Optimitation 為優(yōu)化所選用的遺傳算法。優(yōu)化設(shè)計過程是反復(fù)迭代的過程,步驟為:
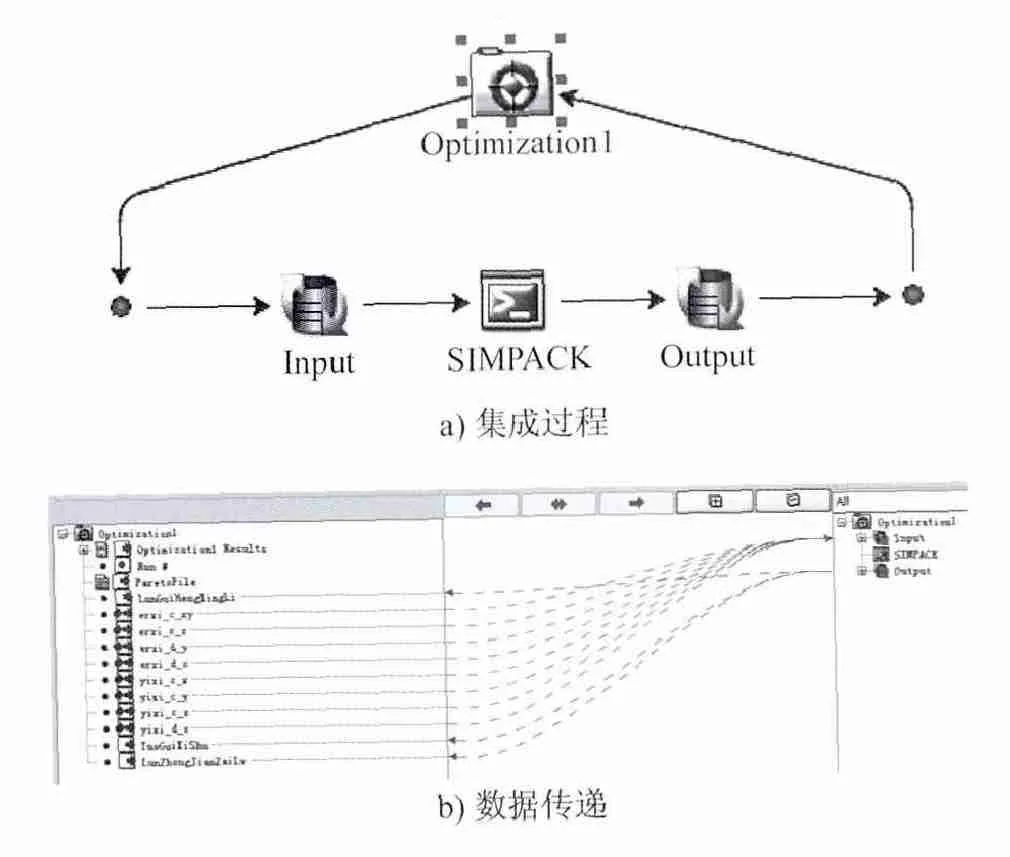
圖5 集成過程與數(shù)據(jù)傳遞
(1)自編的優(yōu)化軟件提取車輛動力學(xué)模型文件Input 中定義的參數(shù)變量,并將其轉(zhuǎn)化為優(yōu)化過程中的變量參數(shù),并調(diào)用動力學(xué)軟件完成動力學(xué)仿真計算,輸出計算結(jié)果。
(2)完成一次計算后,優(yōu)化軟件根據(jù)選定的優(yōu)化算法,修改變量參數(shù)的值,自動更新動力學(xué)模型,準(zhǔn)備下一次計算。
(3)計算完成后,優(yōu)化軟件獲取目標(biāo)函數(shù)并進行判定,若不是最優(yōu),則進行下一次迭代計算。
2.3 遺傳算法的選擇
多目標(biāo)優(yōu)化也稱多準(zhǔn)則優(yōu)化是對多個目標(biāo)同時最優(yōu)化的問題。目標(biāo)及約束條件之間總是存在著復(fù)雜的制約關(guān)系,因此多目標(biāo)問題的解決思路要比單目標(biāo)優(yōu)化問題要復(fù)雜得多[7]。其數(shù)學(xué)表達式為:
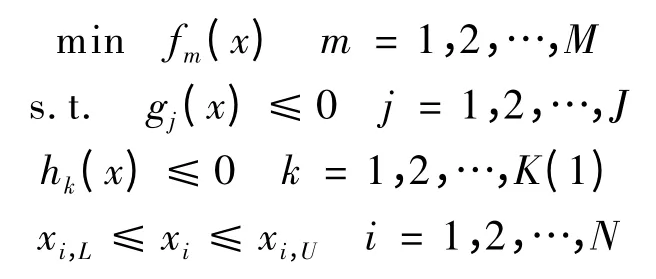
式中:
xi——第 i 個設(shè)計變量,N 表示設(shè)計變量的總數(shù);
xi,L——第 i 個設(shè)計變量取值下限;
xi,U——第 i 個設(shè)計變量取值上限;
fm(x)——第 m 個子目標(biāo)函數(shù),M 為子目標(biāo)函數(shù)的總數(shù);
gj(x)——第j 個不等式約束條件,J 為不等式約束的總數(shù);
hk(x)——第 k 個等式約束條件,K 為等式約束的總數(shù)。
在多數(shù)情況下,各子目標(biāo)之間是相互沖突的,一個目標(biāo)的改善可能會導(dǎo)致其它目標(biāo)變差。各設(shè)計變量對不同的子目標(biāo)的影響貢獻量是不同的,多目標(biāo)優(yōu)化就是將多個子目標(biāo)協(xié)調(diào)權(quán)衡和折衷處理,獲得一組參數(shù)使得各子目標(biāo)盡可能最優(yōu)。
在優(yōu)化軟件中,有多種多目標(biāo)遺傳算法,例如:NCGA 算法、NSGA- Ⅱ算法、AMGA 算法和 PE 算法。本文選用第二代非劣排序遺傳算法(NSGA-Ⅱ),其優(yōu)點是探索性能良好。進化過程中,該算法把當(dāng)前父代群體進行交叉和變異得到子群體,再將子群體與父代群體合并,合并后群體中的個體兩兩按照目標(biāo)函數(shù)向量進行比較產(chǎn)生下一代群體,有利于父代中的優(yōu)良個體進入下一代,擴大了采樣空間,從而提高了優(yōu)化結(jié)果的精度。
2.4 優(yōu)化計算
在優(yōu)化過程中,為模擬軌道線路不平順的影響,軌道激勵選用德國高干擾譜,考慮了線路的高低、方向和水平不平順。采用NSGA-Ⅱ算法優(yōu)化時,優(yōu)化的初始種群數(shù)目選為40 個,遺傳迭代次數(shù)為20代,共進行了800 次優(yōu)化設(shè)計計算[8]。3 個目標(biāo)函數(shù)優(yōu)化歷程如圖6所示。
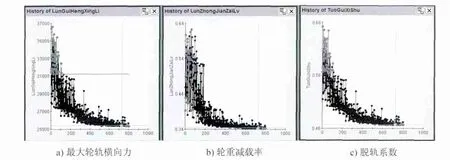
圖6 目標(biāo)函數(shù)優(yōu)化歷程
由圖6 可知,隨著迭代步數(shù)的增加,最大輪軌橫向力、輪重減載率和脫軌系數(shù)都逐漸減小,并且400步以后基本在一個小范圍內(nèi)收斂。優(yōu)化過程中最大輪軌橫向力由最初的31.1 kN,整體減小到27 kN 以下;輪重減載率由最初的0.42 減小到0.38 以下;脫軌系數(shù)由0.562 減小到0.5 以下。3 個目標(biāo)值變化均較明顯,說明優(yōu)化軸箱懸掛參數(shù)和空氣彈簧參數(shù)可改善曲線動態(tài)通過性能。
多目標(biāo)優(yōu)化的解往往不是單一解,而是一個解集,每個設(shè)計變量的取值也不是某一個固定值。例如,懸掛參數(shù)數(shù)值比較大,參數(shù)優(yōu)化的結(jié)果應(yīng)該是一個合理的變化范圍。利用遺傳算法進行優(yōu)化時,數(shù)值的選取朝對目標(biāo)函數(shù)有利的方向發(fā)展,當(dāng)目標(biāo)函數(shù)取值趨于穩(wěn)定時,設(shè)計變量的取值也將相對穩(wěn)定,如圖7所示。各參數(shù)取值范圍見表3。
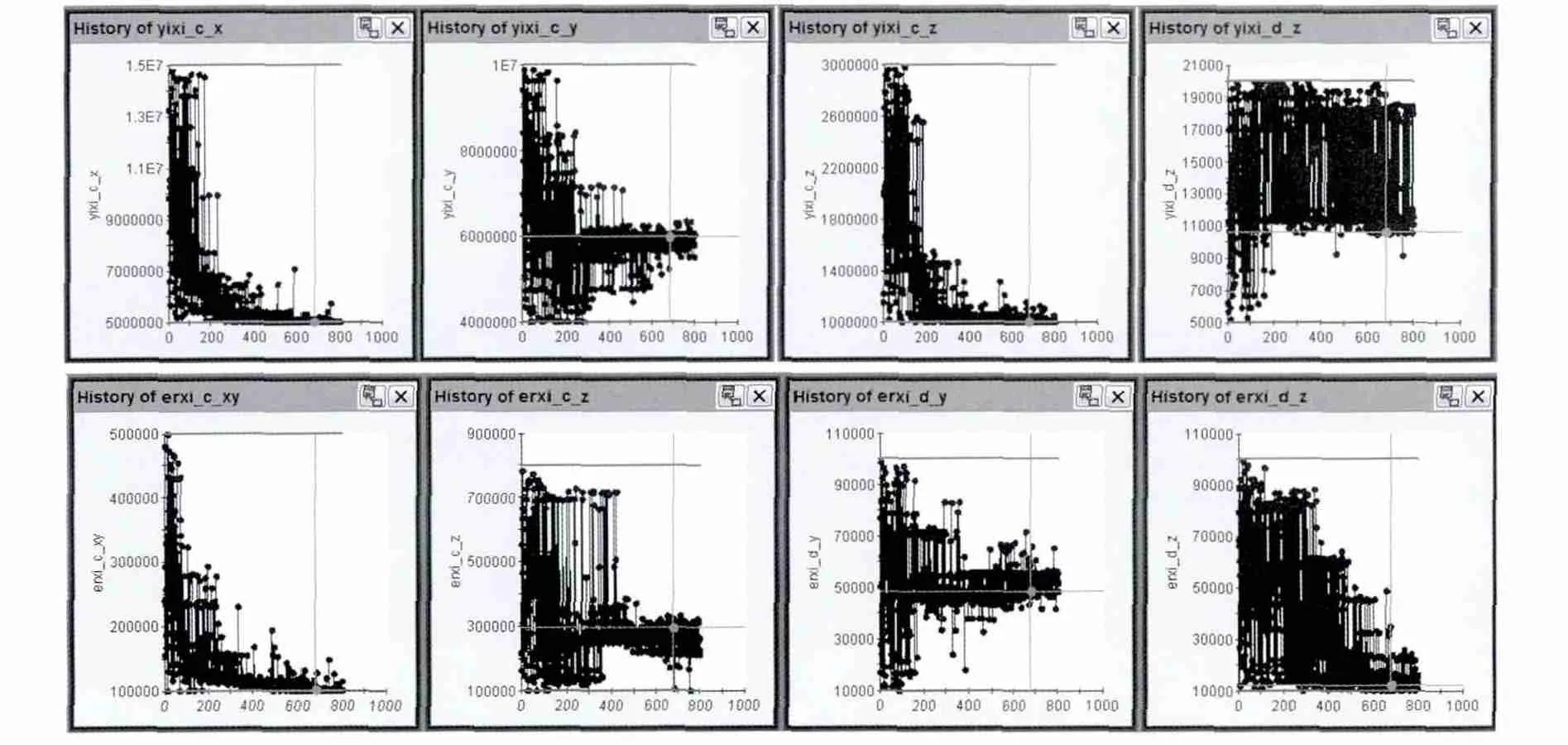
圖7 設(shè)計變量變化歷程
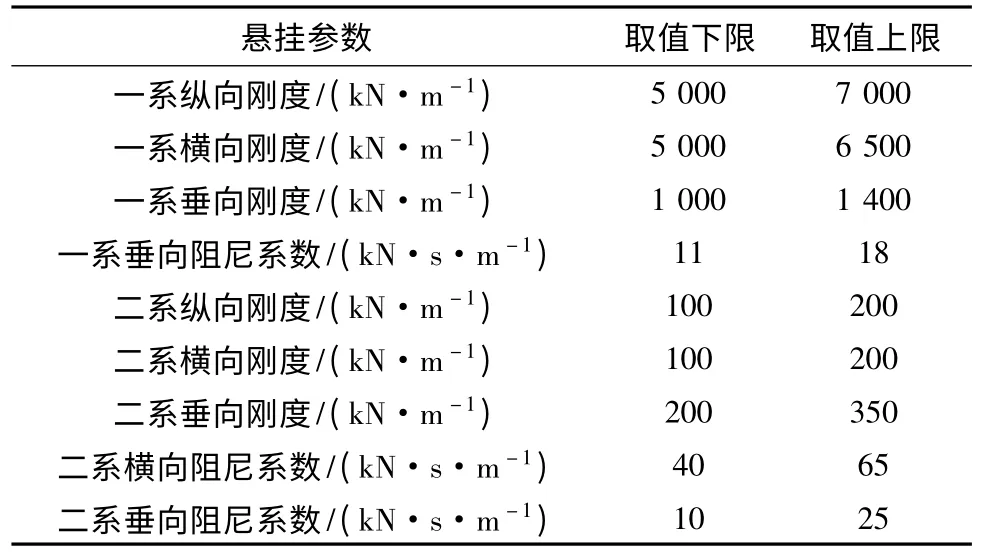
表3 優(yōu)化后懸掛參數(shù)取值范圍
由表3 得到的各設(shè)計變量的取值范圍可以為軸箱定位裝置和空氣彈簧的選擇提供依據(jù),大大提高車輛懸掛參數(shù)的設(shè)計效率,有重要的現(xiàn)實意義。
3 結(jié)果分析
通過優(yōu)化軟件對懸掛參數(shù)的優(yōu)化分析,獲得了多種優(yōu)化方案,根據(jù)遺傳算法的特點,確定了設(shè)計變量的取值區(qū)間。在滿足該區(qū)間取值條件下,選擇較優(yōu)方案。本研究選取364 方案和723 方案與原始方案進行對比分析(見表4)。由表4 可知,選取的兩個方案相比原始方案而言,輪軌橫向力、脫軌系數(shù)和輪重減載率都有較大降低,車輛動態(tài)曲線通過性能有較大改善。其中,723 方案為理想方案。而在實際生產(chǎn)中不存在這樣的軸箱定位裝置和空氣彈簧,因此需要以優(yōu)化所獲得的理想方案為基礎(chǔ),選擇與該方案參數(shù)值相近的軸箱定位裝置和空氣彈簧。本研究的重點在于給出該懸掛參數(shù)優(yōu)化的方法和參數(shù)取值的合理區(qū)間。
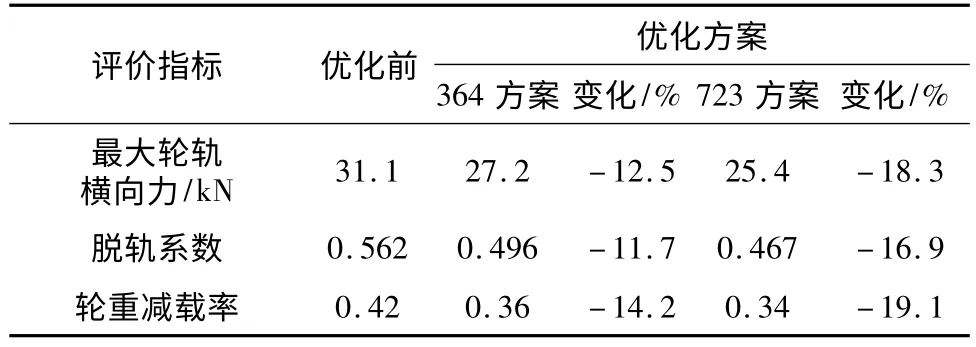
表4 優(yōu)化前后對比
將選取方案的參數(shù)代入動力學(xué)模型進行仿真計算,研究3 個方案在不同軌道曲線半徑情況下的動態(tài)曲線通過性能,如圖8所示。
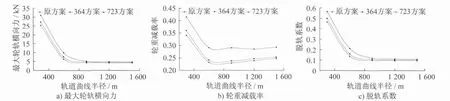
圖8 不同軌道曲線半徑下的主要性能指標(biāo)變化
由圖8 可見,方案364 和方案723 的脫軌系數(shù)、輪重減載率和最大輪軌橫向力都比原始方案要小,并且在半徑小于600 m 的曲線上優(yōu)化效果更為明顯。
4 結(jié)語
(1)軸箱定位裝置和空氣彈簧的動力學(xué)參數(shù)會影響車輛動態(tài)曲線通過性能,其中軸箱縱、垂向定位剛度和空氣彈簧的縱、橫向剛度對其影響較大。
(2)通過自編的優(yōu)化軟件與動力學(xué)分析軟件的聯(lián)合仿真,能夠?qū)崿F(xiàn)運用多目標(biāo)遺傳算法優(yōu)化車輛懸掛參數(shù),大大提高了設(shè)計效率。
(3)通過分析確定了各懸掛參數(shù)取值的合理區(qū)間,在區(qū)間內(nèi)的364 方案和723 方案使得脫軌系數(shù)、輪重減載率和最大輪軌橫向力均有較大降低,且小半徑線路上更為明顯。
[1]Zboinski K.Dynamical investigation of railway vehicles on a curved track[J].European Journal of Mechanics(A/Solids),1998,17(6):1001.
[2]鄒鵬,員華,羅世輝.地鐵車輛懸掛系統(tǒng)參數(shù)選取對車輛垂向動力學(xué)的影響[J].鐵道機車車輛工人,2008(9):1.
[3]杜建華.機車懸掛參數(shù)對不同軸重大功率機車動力學(xué)性能的影響[D].成都:西南交通大學(xué),2011.
[4]孫曉亮.高速拖車懸掛系統(tǒng)參數(shù)對其動力學(xué)性能的影響[D].成都:西南交通大學(xué),2012
[5]鐘睦,曹煒洲,黃尊地.基于iSIGHT 的鐵道車輛橫向穩(wěn)定性優(yōu)化設(shè)計[J].鐵道機車車輛,2010(2):19.
[6]孫曉亮.高速拖車懸掛系統(tǒng)參數(shù)對其動力學(xué)性能的影響[D].成都:西南交通大學(xué),2012.
[7]賴宇陽.Isight 參數(shù)優(yōu)化理論與實例詳解[M].北京:北京航空航天大學(xué)出版社,2012.
[8]翟建平.氣動載荷下高速列車動力學(xué)性能及參數(shù)優(yōu)化研究[D].成都:西南交通大學(xué),2013.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
