遠程遙控移動機械手的可視化實時控制※
2014-07-02 09:19:26賴梓昌楊斌
單片機與嵌入式系統應用 2014年12期
關鍵詞:單片機
賴梓昌,楊斌
(西南交通大學 信息科學與技術學院,成都610031)
引 言
隨著社會生產技術的飛速發展,移動機械手的應用領域不斷擴展,從自動化生產線到海洋資源的探索,乃至太空作業等領域,機械手已成為高科技領域內具有代表性的戰略產品。然而,就目前的機械手技術水平而言,機械手在信息的獲取、處理及控制能力等方面都是有限的,對于復雜的工作任務及多變的工作環境,機械手的能力更顯不足[1]。隨著移動互聯網時代的到來、嵌入式技術及軟件技術的快速發展,越來越多的高性能嵌入式芯片的出現,促進了移動機械手向更加智能化方向發展。本文以TI公司的OMAP4430異構多核處理器[2]為核心,Android手機為控制終端,實現了一款基于搖桿手柄操作的可視化移動機械手。
1 硬件平臺
本次設計的可視化遠程遙控移動機械手硬件部分主要分為OMAP4430開發板、Android手機、車體及機械手馬達3部分。
1.1 OMAP4430開發板
OMAP4430是TI公司的異構多核處理器,其內部主要包括4個處理引擎:基于ARMv7l指令集的SMP Cortex-A9 1 GHz雙核處理器,可編程多媒體硬件加速引擎IVA-HD及協處理器核Cortex-M3,高性能的圖像顯卡Power SGX540及提供圖像視頻并行計算的ISP。其中IVA-HD多媒體加速引擎[3]內部有7個針對各種視頻編解碼而設計的加速引擎,能夠實現對720P視頻的實時編解碼。其內部示意圖如圖1所示。
1.2 Android平臺
Android是一個以Linux為基礎的開放源代碼移動設備操作系統,主要用于移動設備,由Google成立的Open Handset Alliance持續領導與開發中。Android具有開源性和良好的可移植性,成為目前全球第一大智能手機操作系統。本設計中的Android手機采用聯發科Cortex-A7處理器,支持無線網卡AP熱點,支持H264硬解碼。
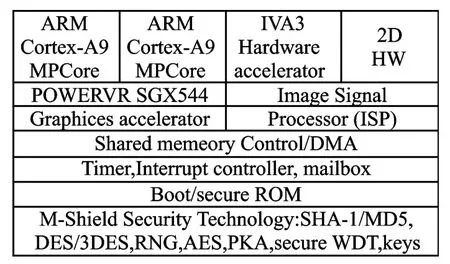
圖1 OMAP4430內部引擎示意圖
1.3 移動機械手
移動機械手由運動小車和機械手組成,運動小車負責地面移動,機械手通過旋轉6個馬達關節來完成捉取地面目標任務。
1.3.1 移動小車
小車利用高性能ATmega128L芯片[4],通過傳感器采集當前的狀態及驅動DC馬達進行移動。ATmega128L單片機為基于AVR RISC結構的8位低功耗CMOS微處理器。由于其先進的指令集以及單周期指令執行時間,ATmega128L單片機的數據吞吐率高達1 MIPS/MHz,小車采用4輪驅動車輪形成移動機器人,配有4個DC直流馬達及多種傳感器,具有卓越的旋轉能力和可靠的穩定性。小車運動控制框架如圖2所示。

圖2 小車運動控制框架圖
1.3.2 機械手
機械手由6個AX-12馬達組成,AX-12馬達具有180級別位置和速度控制、位置角度和速度的實時反饋、內部溫度或力矩超出范圍時給予警告提示等優點。第一個馬達的關節負責機械手360°旋轉,第二個關節同時控制兩個馬達,這個關節在提起和放下物體時提供了所需的扭矩,因此通過控制這兩個馬達補充扭矩大小的不足,而第3和第4個馬達提供了機械手捉取目標時前伸和后縮所需的力矩,第5個馬達則是手腕旋轉馬達,用于旋轉最后一個馬達的空中角度,最后一個馬達的旋轉將推動夾子張開和閉合來捉取地表目標。通過這6個馬達的機械臂,可完成向所有方向移動并進行多樣化的動作。
1.4 系統硬件框架
系統硬件框架如圖3所示。
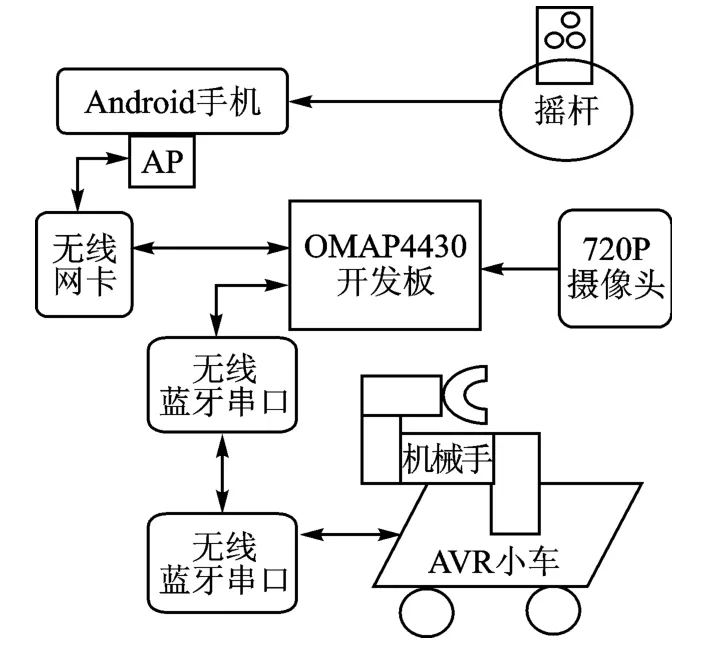
圖3 系統硬件框架圖
2 軟件設計
系統軟件設計包括Android手機應用、OMAP4430開發板Linux控制服務端和無線視頻服務軟件設計、AVR單片機程序設計,系統軟件框架如圖4所示。
Android應用主要負責接收手柄水平、豎直方向的搖桿時間和手柄按鍵事件、實時分析處理事件、將結果通過Socket發送給OMAP4430開發板。同時Android將實時接收OMAP4430開發板通過H264算法壓縮的720P視頻流,通過硬解碼技術將解碼緩存繪制到控制界面上。
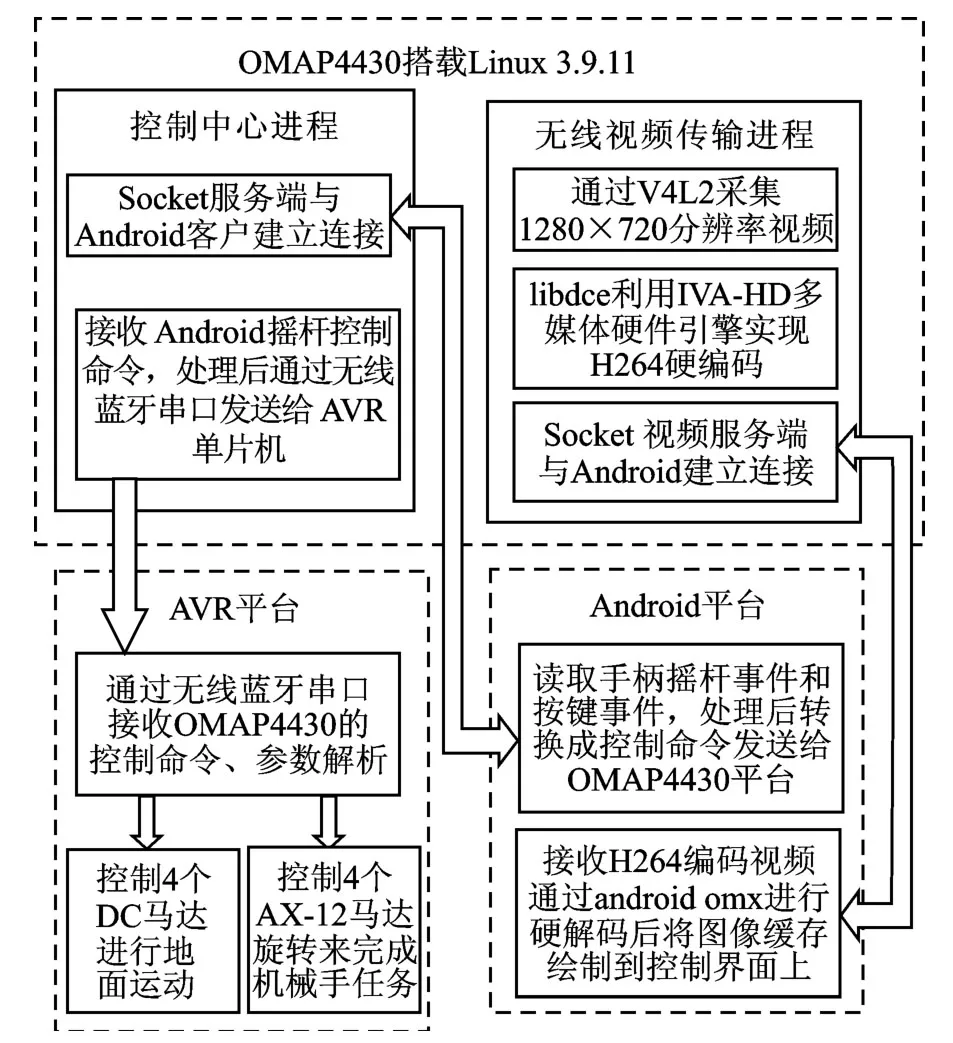
圖4 系統軟件框架圖
OMAP4430開發板搭載Linux3.9.11操作系統,通過無線網卡Socket編程與Android手機建立通信,它主要負責接收Android平臺發過來的控制命令,進行處理后將數據通過無線藍牙串口發送給AVR單片機,控制移動機械手的運動和馬達操作。利用OMAP4430在視頻編解碼上的強大優勢,USB攝像頭采集720P分辨率的視頻幀,通過libdce庫利用內部的IVA-HD多媒體硬件加速引擎進行H264編碼,并將編碼視頻緩存流通過無線網卡Socket通信發送到Android手機進行顯示。而底端AVR單片機則負責接收OMAP4430發過來的控制命令來操作4個直流電機進行運動,同時將通信數據解析為機械馬達旋轉速度及角度。
2.1 移動機械手單片機軟件實現
移動機械手的控制核心為ATmega128L單片機,其內部通過時鐘產生變換PWM來控制4個DC電機旋轉從而實現機械手的移動。內部有兩個UART串口,分別連接OMAP4430通信的藍牙串口和控制AX-12馬達旋轉的串口。其軟件流程如下:
①寄存器初始化,包括初始化時鐘定時器、端口輸入輸出初始化、設置LED控制寄存器等。
②打開藍牙串口與AX-12通信串口,設置串口的波特率、奇偶校驗、停止位等屬性。
③藍牙串口接收OMAP4430發過來的控制參數,并進行參數解析處理。如果為運動控制參數,通過PWM_change()修改PWM來控制機械手運動方向,如果為機械手設置參數,通過Ctrl_Array_MT()設置每個AX-12馬達的旋轉角度和旋轉速度來完成捉取目標任務。
④讀取AX-12馬達的溫度及力矩,如果超出預定范圍,則調整馬達速度和力矩,并向OMAP4430開發板發出提示信息。機械手動作控制命令如表1所列。
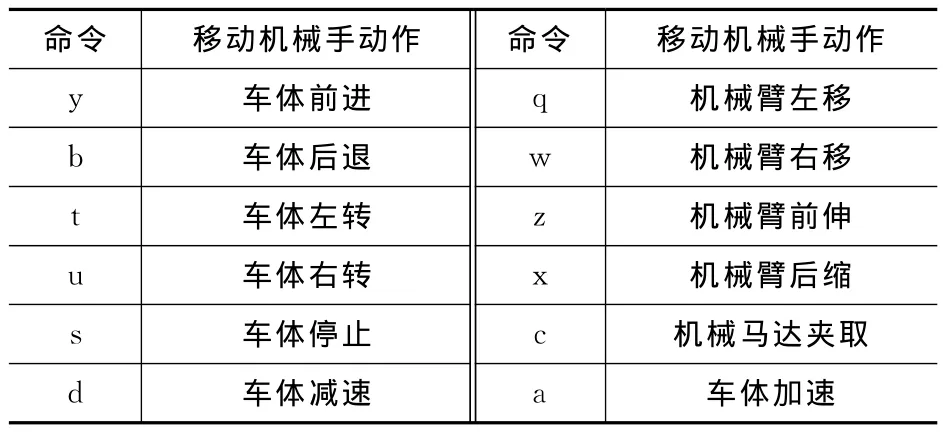
表1 移動機械手操作命令
2.2 Android應用軟件設計
2.2.1 搖桿手柄事件處理
搖桿手柄采用USB OTG方式連接到Android手機,Linux內核已經包括其驅動程序。手柄的水平豎直搖桿事件和按鍵事件都將觸發Main Activity的on KeyDown()函數和onGeneric MotionEvent()函數的調用,在函數中分析事件對象的屬性(觸發按鍵ID、事件類型)進而向OMAP4430發出不同控制命令。其參考代碼略——編者注。
2.2.2 Android H264解碼
Android在4.1版本加入了H264視頻硬解碼API,其MediaCodec內部封裝了open Max庫進行多媒體硬解碼加速。open Max是一個開源、跨平臺的多媒體編解碼加速 API[5],包括 open Max應用層、open Max集成層、open-Max開發層。其解碼H264的步驟略——編者注。
2.3 Linux控制進程及無線視頻服務
OMAP4430開發板運行Linux3.9.11操作系統,具有實時性強、移植性好等優點。利用Andriod手機無線網卡創建一個AP熱點,OMAP4430開發板的無線網卡將連接到AP上,二者通過網絡進行數據通信。
控制進程將創建一個TCP Socket服務端,等待Android應用連接,同時打開無線藍牙串口設備/dev/tty-USB0,設置串口屬性(115 200波特率、8位數據、無校驗等)。在連接建立之后,循環接收Andriod發過來的控制命令并進行命令解析處理,處理結果將通過藍牙串口發送給AVR單片機來控制移動機械手。
無線視頻傳輸進程將通過V4L2編程接口調用USB攝像頭采集1 280×720視頻幀(采集速度為30 fps)。利用OMAP4430在多媒體視頻編解碼強大運算能力,通過libdce庫的engine_open()、engine_create()、viddce_control()、viddec_procees()函數創建 H264編碼實例并通過RPMSG消息總線[6]遠程調用協處理器核的IVA-HD的加速引擎來提高視頻編碼效率。為了減小網絡帶寬需求、提高無線傳輸效率,本次采用Baseline、Level3.2編碼級別[7]。最后將H264編碼緩存通過無線網卡Socket服務端發送到Android客戶端進行解碼顯示[8]。控制進程和無線視頻傳輸進程的流程如圖5、圖6所示。
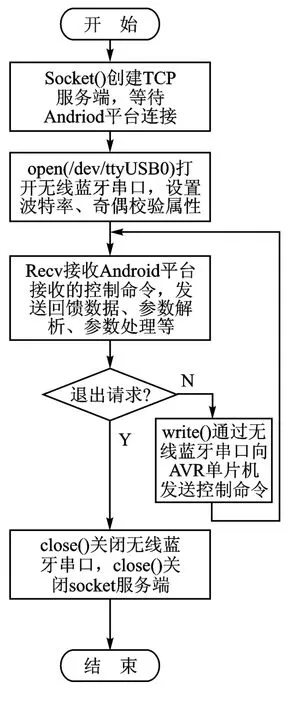
圖5 控制進程流程
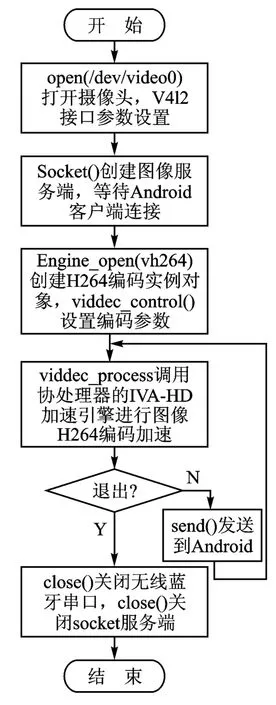
圖6 無線視頻服務流程圖
由圖7、圖8可知移動機械手可以完成捉取地面目標的任務,且Android控制界面可以實時顯示機械手操作畫面。由于借助OMAP4430內部的協處理器核Cortex-M3和IVA-HD多媒體硬件引擎來實現H264編碼加速,因此本次720P無線視頻傳輸實時性較高,達到了28 fps。實驗測試數據如表2所列。

圖7 機械手操作示意圖
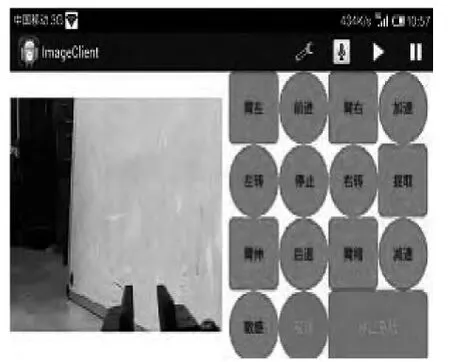
圖8 Android控制界面
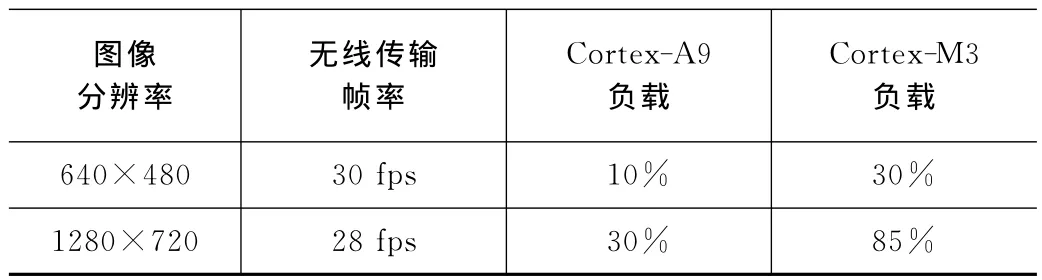
表2 無線視頻傳輸實時性測試
結 語
針對移動機械手控制方式復雜、環境周圍信息獲取能力不足的缺點,采用Android手機為控制中心,搖桿手柄為輸入設備實現了移動機械手的可視化實時操作。同時利用OMAP4430異構多核處理器內部協處理器核Cortex-M3、IVA-HD多媒體引擎加快720P H264視頻編碼效率,提高了無線視頻服務的實時性。實踐證明,系統具有人機交互方式友好、控制簡單、多核間負債平衡、無線視頻服務實時性強等優點。
編者注:本文為期刊縮略版,全文見本刊網站www.mesnet.com.cn。
[1]劉宇紅,張明路,孟憲春,等.移動機械手的穩定性及補償方法現狀與發展趨勢[J].機電產品開發與創新,2008(2):5-7.
[2]Texas Instruments.OMAP4430 Multimedia Device Silicon Revision 2.0 [EB/OL].[2014-07].http://focus.ti.com/pdfs/wtbu/OMAP4430_ES2.0_Public_TRM_vJ.pdf.
[3]Texas Instruments.Ducati For Dummies[EB/OL].[2014-07].http://omappedia.org/wiki/Ducati_For_Dummies.
[4]李玉娟,王琪.基于ATmega128L的智能探測車的設計與實現[J].自動化技術與應用,2007(3):42-44.
[5]沈永增,李曉鳳,吳冬林.Android下Open Max IL框架的研究和應用[J].計算機應用與軟件,2012(8):265-268.
[6]Texas Instruments.Design Overview-RPMsg[EB/OL].[2014-07].http://www.omappedia.org/wiki/Design_Overview_-_RPMsg.
[7]朱坤旺,傅文淵,凌朝東.低功耗 H.264 Baseline解碼IP核設計[J].華僑大學學報:自然科學版,2011(3):280-283.
[8]李洪輝,劉志勤.GPU在Android顯示系統中的應用與研究[J].計算機工程與設計,2013(12).
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
