基于廣度優(yōu)先搜索的晶粒掃描方法
2014-07-04 03:28:36高建利侯為萍劉玉倩
電子工業(yè)專用設備 2014年10期
高建利,侯為萍,劉玉倩
(中國電子科技集團公司第四十五研究所,北京100176)
晶粒掃描技術是電子工藝專用設備的常用功能,主要應用于LED 晶粒、半導體晶粒分揀、封裝和檢測設備中。晶粒以行列方式粘結在晶片環(huán)的藍膜上,設備按一定的順序對晶粒進行圖像識別和拾取,這個順序就是晶粒掃描的方法。合理的晶粒掃描方法可以提高設備的效率。
晶片環(huán)上的晶粒按行列排列,因此逐行掃描是最常用的晶粒掃描方法,但是逐行掃描也有一定缺陷:
(1)換行時需要空走幾個晶粒位置才能判定一行到頭走下一行;
(2)不管是否有晶粒,對每個晶粒位置都要走到并進行晶粒識別;
(3)掃描結束時需要連續(xù)幾行沒有晶粒才能判定掃描結束;
(4)除了掃描起始位置之外,還需要設置晶粒間距、掃描方向、連續(xù)無晶粒數、連續(xù)無晶粒行數等掃描參數;
(5)需要從一行中拾取晶粒,不能最大限度保證質量相似的晶粒一起拾取。
由于逐行掃描存在以上缺點,因此改進晶粒掃描方法是提升設備性能的有效方式。將晶粒看作廣度優(yōu)先搜索中的節(jié)點,根據廣度優(yōu)先搜索算法進行晶粒掃描,可以提升設備性能。
1 硬件環(huán)境
晶片臺是晶粒的承載機構,主要由圖像識別、運動控制、晶片臺執(zhí)行等組成,如圖1 所示。圖像識別部分包括CCD 相機、圖像采集卡、鏡頭、光源等部件,它利用機器視覺技術,對晶粒圖像進行采集和分析識別,完成晶粒的定位和缺陷檢測等功能。運動控制部分包括運動控制卡、X向電機、Y 向電機與相應的電機驅動器,通過工控機發(fā)出的數字脈沖信號控制電機的運動。晶片臺執(zhí)行部分是電機通過滾珠絲杠或其它方式帶動X-Y 平臺,包括X、Y 兩個軸,在平面內做運動,形成平面坐標系,這樣每顆晶粒就有一個X、Y 坐標位置。
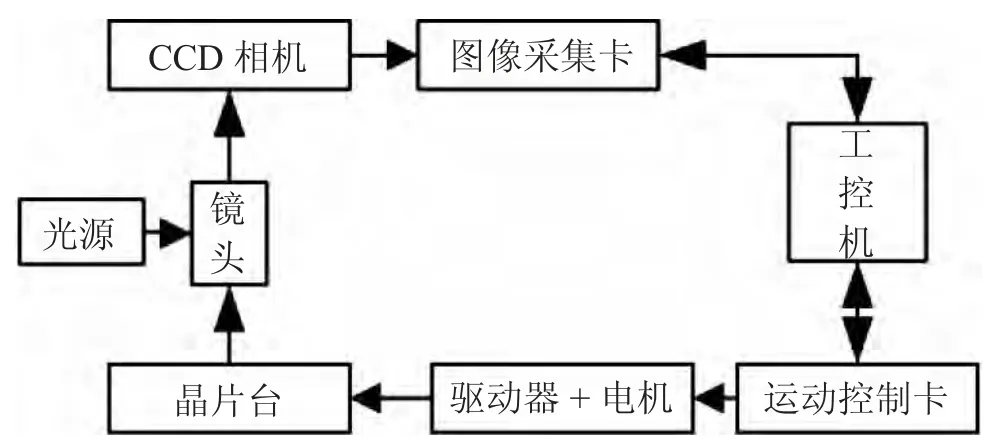
圖1 晶片臺機構
藍膜固定在晶片環(huán)上,晶粒在藍膜上的分布如圖2 所示。晶粒是刻有電路圖形的半導體顆粒,在藍膜上按行列排列,可能會出現晶粒空缺和晶粒缺陷的情況。晶粒的X 向間距和Y 向間距都在小范圍內波動,因此設備需要通過圖像識別的方法準確定位晶粒位置以供取片使用。
2 逐行掃描方法

圖2 晶粒分布示意圖

圖3 晶粒逐行掃描示意圖
晶粒逐行掃描方法如圖3 所示,晶片臺X 向向右(或向左,Y 向為向上或向下)運動到下一個晶粒位置處,發(fā)送圖像識別命令,根據識別結果把晶粒對準到圖像中心,等待拾片機構拾取晶粒,拾取完畢后,晶片臺繼續(xù)運動到下一個晶粒位置處。當本行達到連續(xù)無晶粒數后,晶片臺跳轉到第一次沒有晶粒位置的正下方(或正上方)晶粒處,并保持原來的運動方向繼續(xù)掃描,直到再次達到連續(xù)無晶粒數后,晶片臺運動到上次晶粒跳轉時晶粒的左側(右側)晶粒處,并改變掃描方向為向左(或向右),繼續(xù)識別對準晶粒的過程。直到達到連續(xù)幾個晶粒行數后,晶粒掃描結束。
從掃描的過程可以看出,逐行掃描需要晶粒間距、掃描方向、連續(xù)無晶粒數、連續(xù)無晶粒行數等掃描參數,在每行的兩端需要空走幾個晶粒位置以判斷該行掃描完成,掃描結束時需要空走幾行以判斷掃描結束。
3 廣度優(yōu)先搜索算法
圖4 是一個用線或邊連接在一起的節(jié)點的集合,從一個給定的節(jié)點開始,訪問能夠到達的所有節(jié)點就是圖的搜索,廣度優(yōu)先搜索就是一種常用的圖搜索方法。如圖4 表示了廣度優(yōu)先搜索方法。
廣度優(yōu)先算法的核心思想是:從初始節(jié)點開始,生成第一層節(jié)點,檢查目標節(jié)點是否在這些后繼節(jié)點中,若沒有,再用產生式規(guī)則將所有第一層的節(jié)點逐一擴展,得到第二層節(jié)點,并逐一檢查第二層節(jié)點中是否包含目標節(jié)點。若沒有,再用算符逐一擴展第二層的所有節(jié)點……,如此依次擴展,檢查下去,直到發(fā)現目標節(jié)點為止,即:
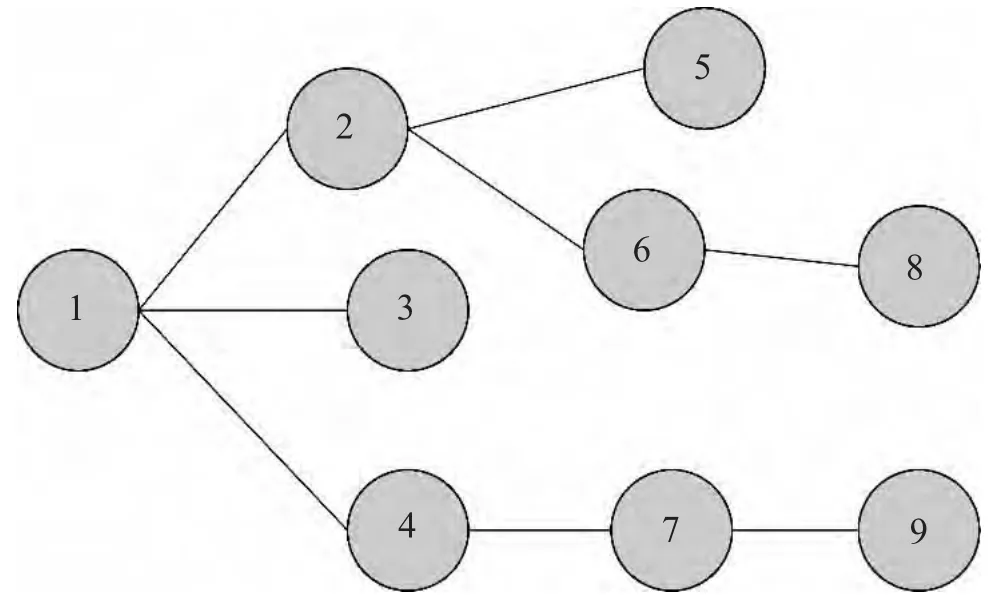
圖4 廣度優(yōu)先搜索示意圖
1) 從圖中的某一節(jié)點V1開始,先訪問V1;
2) 訪問所有與V1相鄰的節(jié)點V2,V3,V4;
3) 依次訪問與V2,V3,V4相鄰的所有未曾訪問過的節(jié)點;
4) 循此以往,直至所有的頂點都被訪問過為止。
5) 這種搜索的次序體現沿層次向橫向擴長的趨勢,所以稱之為廣度優(yōu)先搜索。
4 廣度優(yōu)先搜索在晶粒掃描中的應用
4.1 條件
將晶粒看做圖中的節(jié)點,完成廣度優(yōu)先搜索,需要找到每個晶粒的相鄰晶粒,視場內只有一顆晶粒時不能找到相鄰晶粒,因此需要調節(jié)CCD 的識別范圍內有9 顆晶粒,這樣中心的晶粒與周圍8 顆晶粒相鄰,可以進行廣度優(yōu)先搜索,如圖5 所示,視場內有9 顆晶粒,因此在掃描條件中只需要指定掃描起始點和圖像模板,不需要設置晶粒間距、掃描方向、連續(xù)無晶粒數、連續(xù)無晶粒行數等掃描參數,設置掃描參數簡單,有利于設備操作。
4.2 實現過程
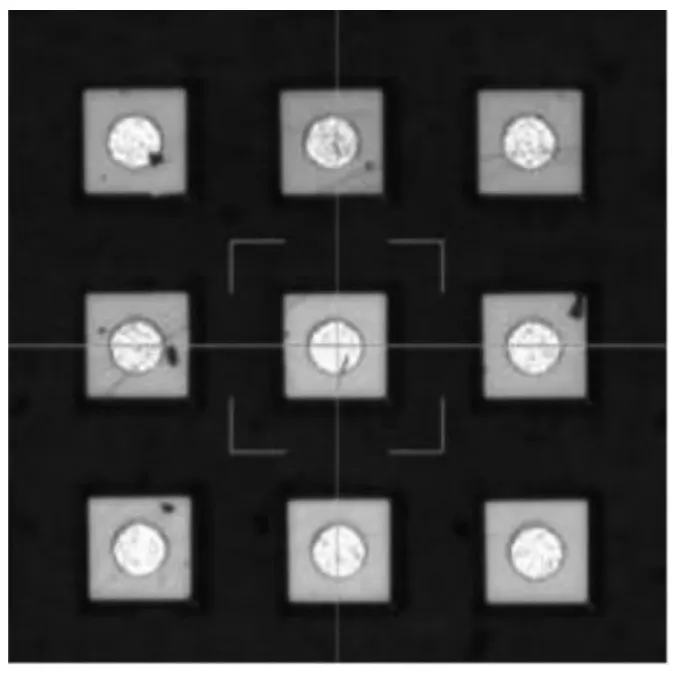
圖5 晶粒識別示意圖
實際掃描過程從使用者指定的掃描起始點開始掃描晶粒,通過圖像識別將與起始位置鄰接的晶粒得到第二層晶粒位置,記入隊列,再依次運動到第二層晶粒經圖像識別得到第三層晶粒并記入隊列……,如此依次擴展,掃描下去,直到拾取完所有連通區(qū)域的晶粒為止。如圖6 所示,即:
1)運動到晶粒1 進行晶粒的圖像識別,將識別到的晶粒位置像素值轉換為電機脈沖數,然后對晶粒位置進行編號,中心位置晶粒編號為1,左上角為編號2,以此類推,如圖6 所示,編到9為止;
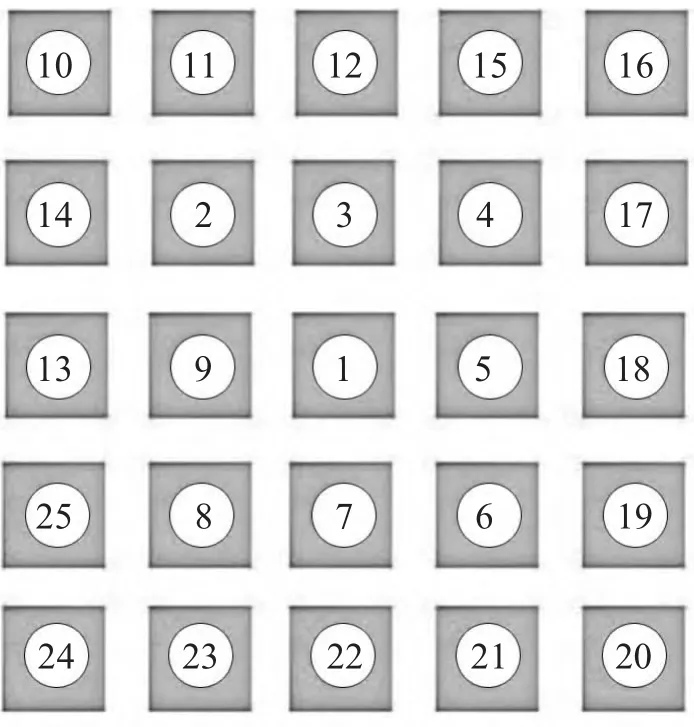
圖6 晶粒廣度優(yōu)先搜索示意圖
2) 將編號的晶粒位置依次與隊列中的晶粒位置進行對比,晶粒位置相差過小的認為是重合晶粒,已經進入隊列,晶粒位置沒有重合的記入隊尾;
3)隊列頭出列,晶片臺運動到對列頭位置識別并拾取晶粒;
4)重復步驟2、3,進行圖像識別將鄰接的晶粒記入隊尾;
5)循此以往,直至隊列為空,連通區(qū)域的所有晶粒被拾取為止。
這樣晶粒掃描的次序體現沿層次向圓周擴展的趨勢,即將廣度優(yōu)先搜索算法應用到了晶粒掃描過程中。根據以上掃描方法設計的軟件流程如圖7 所示,晶片臺運動到掃描起始點,識別晶粒,根據晶粒的識別情況對識別到的晶粒進行編號,然后將晶粒位置與隊列中保存的晶粒位置進行比較,沒有重合的晶粒位置加入隊尾,如果隊列為空則掃描結束,否則隊列頭的晶粒位置出隊列,晶片臺運動到出列的晶粒位置,由拾片機構取走晶粒,然后繼續(xù)識別晶粒。如此循環(huán)往復直到隊列為空時掃描完成。這種晶粒掃描方法避免了空走晶粒位置,對提高設備的效率有重要意義。

圖7 晶粒廣度優(yōu)先搜索流程圖
4.3 限制
使用廣度優(yōu)先搜索掃描晶粒呈現了從掃描起始點沿層次向圓周擴展的掃描趨勢,只要是鄰接的晶粒就能進行掃描。對于不與掃描晶粒塊鄰接的非連通晶粒塊,需要重新設置掃描起始點進行掃描。由于是沿層次掃描晶粒,因此這種方法也不能保證質量相似的晶粒一起拾取。需要CCD 相機的視場內有9 顆晶粒并且同時識別,也是這種掃描方法的一個限制。
5 結束語
使用廣度優(yōu)先搜索方法掃描晶粒需要設置的掃描參數簡單,操作簡便。由于每次移動到晶粒位置前都已經識別完成,廣度優(yōu)先搜索的方法能夠保證每次移動都能到達晶粒位置,不會出現走空晶粒位置的情況,因此廣度優(yōu)先搜索方法能夠提高設備效率。但是這種方法也存在一些缺點,比如只能掃描連通的晶粒,不能保證質量相似的晶粒一起拾取等,在設備中可以根據情況選擇合適的晶粒掃描方式。
[1] 王天曦,王豫明.貼片工藝與設備[M].北京:電子工藝出版社,2008.
[2] 殷人昆.數據結構:用面向對象方法與C++描述[M].北京:清華大學出版社,2002.
[3] 徐品烈,任紹彬,郝靖. 裝片機晶片臺運動控制系統(tǒng)的分析[J]. 電子工業(yè)專用設備,2010,39(5):12-16.
[4] 鐘江生,李秦川,夏毓鵬,等. 貼片機視覺系統(tǒng)構成原理及其定位[J]. 電子工業(yè)專用設備,2005,34(12):26-29.
[5] 歐陽圣. 幾種經典搜索算法研究與應用[J]. 計算機系統(tǒng)應用,2011(5):243-247.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
測控技術(2018年8期)2018-11-25 07:42:16
電子制作(2018年11期)2018-08-04 03:26:08
工業(yè)設計(2016年12期)2016-04-16 02:52:00
Coco薇(2016年2期)2016-03-22 02:42:52
電子世界(2016年22期)2016-03-12 22:15:32
超硬材料工程(2016年1期)2016-02-28 22:20:04
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
消費者報道(2014年7期)2014-07-31 11:23:57
