農田灌溉水質監測控制系統設計
2014-07-05 16:25:32劉麒王影
山東農業大學學報(自然科學版) 2014年5期
劉麒,王影
吉林化工學院,吉林吉林132022
農田灌溉水質監測控制系統設計
劉麒,王影
吉林化工學院,吉林吉林132022
針對灌溉農業水質監測儀流路進樣控制系統高穩定性與高精度的要求,基于單片機技術設計了流路進樣模塊驅動控制電路,引入蠕動泵的驅動電路和多位閥的控制電路,并進行電路控制精度測試實驗。實驗結果表明:基于單片機設計控制電路可提高水質監測儀流路進樣電路的穩定性與流路進樣的精確度,為灌溉水質監測儀可靠性的提高奠定關鍵技術基礎。
單片機;灌溉水質監測儀;流路控制系統;穩定性;高精度
水資源污染已成為影響農業生產的重要影響因素之一。如果能夠對水質進行實時的監測,及發現水質污染并進行治理,這對于農業生產。開發先進的在線水質監測系統具有重要的實用意義和巨大的市場需求[1]。灌溉水質監測儀器多數通過對比目標液與標準液的建標曲線得出檢測結果,所以儀器流路進樣模塊的進樣精度直接影響了水質檢測結果的準確度,儀器精確穩定的進樣顯得非常重要[2]。為此,論文展開灌溉農業水質監測儀的進樣模塊控制電路的研究以提高儀器的穩定性與水質檢測的精確度。
1 灌溉水質監測儀的流路系統設計
本文所設計灌溉水質監測儀系統總體結構如圖1所示,嵌入式控制系統采用的是Linux操作系統,處理器采用ARM微處理器。嵌入式控制系統通過控制多位閥選擇不同的試劑通路,然后控制蠕動泵將一定量的試劑抽入檢測室,通過攪拌加快試劑的反應。光源發出的光經過檢測室的液體吸收后,經光通路由微型光譜儀接收。然后微型光譜儀通過串口將吸光度數據傳送到嵌入式控制系統,嵌入式控制系統通過對比待測溶液吸光度和標準溶液吸光度-濃度標準曲線,確定待測溶液的某一成分濃度,從而實現水質參數的快速實時監測[3]。
1.1電路設計整體框圖
水質監測儀的整體電路系統設計框圖如圖2所示。該電路以ARM微處理器為控制核心,外圍電路包括豐富的接口,理論上可以很好的控制系統協調穩定的工作。ARM微處理器外圍電路包括復。位電路、LCD液晶顯示屏電路、觸摸屏電路、用于與上位機通信的串口電路以及其它的一些調試接口[4]。流路器件的驅動與控制電路主要包括多位閥的串口控制電路和蠕動泵的驅動與控制電路。其中多位閥與蠕動泵的驅動控制電路是本次設計的重點內容,也是直接關系到進樣模塊工作效果的重要內容。
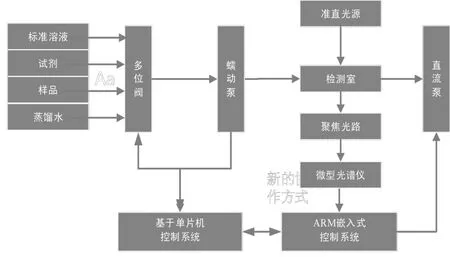
圖1 在線灌溉水質監測儀系統總體結構Fig.1 Generalstructure of irrigationagriculture water quality monitor system

圖2 水質監測儀的電路系統設計框圖Fig.2 Circuit diagram of the system design for water quality monitor
1.2電源電路
論文采用24 V直流電源作為系統供電電源,24 V直流電源可以直接為多位閥供電,也是流路系統中所需要的最高電壓。蠕動泵驅動電路需要12V和5V的電壓作為供電,同時USB接口電路以及LCD液晶顯示屏電路都需要5 V電壓作為電源[5]。圖3為根據固定輸出12 V電壓的LM2596開關電壓調節器的典型應用電路設計的電源電路。電容C33是220μF的鋁電解電容,作為旁路電容,用于防止在輸入端出現大的瞬態電壓,保持直流輸入電壓的穩定[6]。肖特基二極管1N5824與電感L1并聯作為電路的續流二極管,保證電壓穩定以及防止燒壞器件;電容C34采用的是220μF的鉭電容,作為輸出端的補償電容,保證輸出電壓的穩定性。
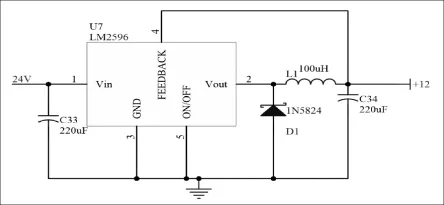
圖3 12 V電源電路原理圖Fig.3 Principle diagram of 12V power supply circuit
2 ARM微處理器外圍電路
論文采用的ARM微處理器是Samsung公司的S3C2410芯片。對于本次設計,S3C2410具有LCD控制器,提供1通道LCD專用DMA,3通道UART(通用異步收發器)、8通道10比特ADC和觸摸屏接口、2端口USB(通用串行總線)主機/1端口USB設備。
2.1復位電路
ARM微處理器的J12引腳為nRESET引腳,若要微處理器復位,則需要在nRESET引腳上加最少四個時鐘周期的低電平。電路中采用STC811T芯片作為復位信號的產生芯片,當芯片的MR引腳上有一個從低到高的電平跳變時,RESET引腳將產生一個持續200μS的低電平。如圖4所示,當按鍵SW1沒有按下時,MR引腳保持高電平狀態。當按鍵被按下時,MR引腳變為低電平狀態,按鍵被放開后,電平恢復高電平,此時完成了一個從低到高的電平跳變,RESET引腳將產生一個持續200 μS的低電平。RESET引腳與微處理器的J12 nRESET引腳連接,200μS的低電平時間能夠保證微處理器復位。
2.2LCD觸摸屏電路
觸摸屏電路設計如圖5所示。電路中采用兩個FDC6321芯片,即四個MOS管,用于實現對觸摸屏的引腳電平的切換控制;電路圖中的電阻R16和電容C24以及R17和C25組成兩個低通濾波器,分別用來濾除Y坐標信號與X坐標信號的高頻噪聲。
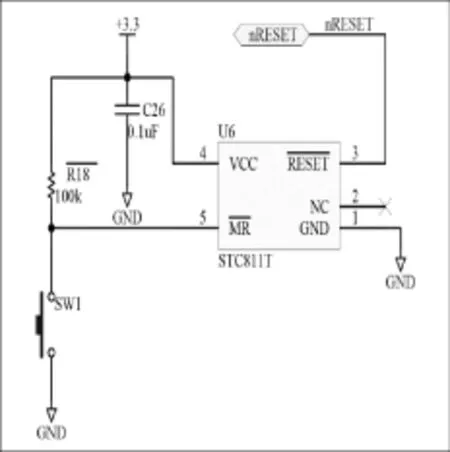
圖4 復位電路Fig.4 Reset circuit
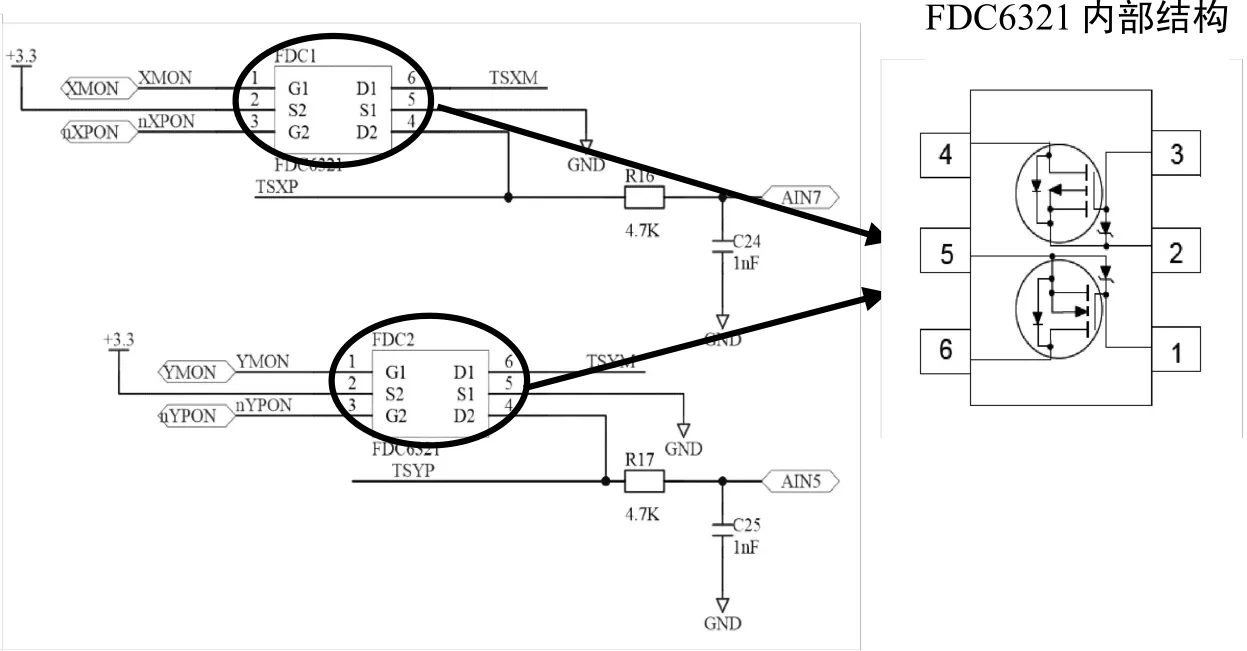
圖5 觸摸屏控制電路Fig.5 Control circuit of the touch screen
3 流路進樣控制電路
3.1微型步進電機蠕動泵驅動電路
微型步進電機蠕動泵是由兩相微步進電機驅動電路驅動的,蠕動泵驅動電路圖見圖6所示,電路上半部分為控制信號的處理電路,下半部分為步進電機的驅動電路。其中EN為使能信號,控制驅動電路是否工作;DIR信號控制步進電機的旋轉方向;STEP信號是步進電機工作所需要的脈沖信號。由于ARM芯片引腳輸出電壓為3.3V且驅動能力有限,電路中接入了3.3 V電源,采用三極管9013作為開關,控制信號通過控制三極管的基極電壓控制后續電路的導通與否。
為減小控制電路與驅動電路的相互干擾,電路中采用可控制光電耦合器件TLP521將電路的前后端進行隔離。為保證信號質量,將光耦輸出接入4HC14D六位反向施密特觸發器,經過74HC14D整形以后,電路的仿真結果如圖8所示,圖中實線是經過反相施密特觸發器之后的信號波形,虛線是經過光耦之后的輸出信號,由圖可知信號波形將得到很大的改善。
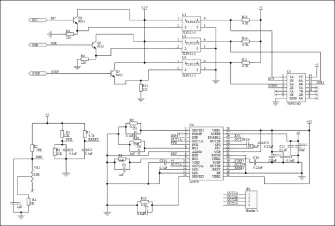
圖7 蠕動泵驅動電路Fig.7 Drive circuit of the peristaltic pump
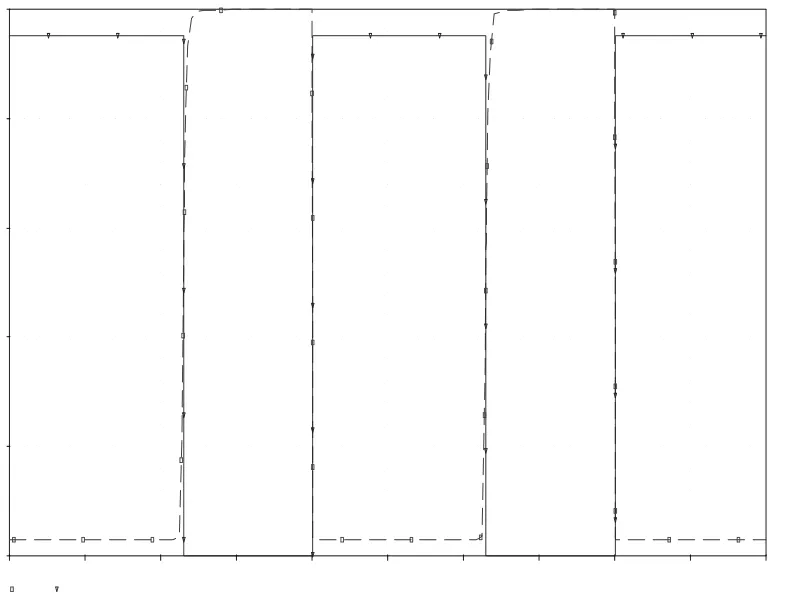
圖8 控制信號處理電路仿真結果Fig.8 Simulation results of control signal processing circuit
3.2多位閥控制電路
流路進樣模塊采用的多位閥自帶控制模塊,可以通過串口與上位機進行通信,其串口通訊電平為5 V,而ARM微處理器的串口通訊電平為3.3 V,所以需要通過串口轉換芯片MAX3232使微處理器S3C2410的串口與多位閥模塊的串口相匹配,完成通訊。ARM芯片通過串口向多位閥的控制模塊發送對應的指令就可以完成對多位閥的控制。多位閥串口通信電路如圖9所示。

圖9 多位閥串口通信電路Fig.9 Communication circuit of multiposition valve ports
5 實驗結果分析
對硬件電路分模塊進行調試,調試無誤后,搭建流路進樣精度實驗平臺,進行精度實驗以驗證電路的穩定性與精確度。根據灌溉水質監測儀監測對象以及檢測項目的需求,實驗所需確定的進樣體積包括:0.2 mL、0.8 mL、1.0 mL、1.2 mL、2.0 mL和2.5 mL。為確保進樣精度并且便于實驗,實驗采用密度為0.9999 g/mL的蒸餾水作為目標試劑。利用高精度電子天平稱取蠕動泵抽取的試劑的質量,然后求得其體積。試驗中所記錄的結果均為將步進電機步數調整完成后的最佳進樣結果。進樣精確度測試實驗數據如表1所示。從表1的測試數據可以計算得出各次測量值與理論值的相對誤差的絕對值小于2%,流路進樣精度很高,符合設計要求。相對于均值的誤差呈現出標準的隨機性,方差小于0.0001,測量精密度很高。相對標準偏差為1%左右,流路控制系統具有很好的重現性。
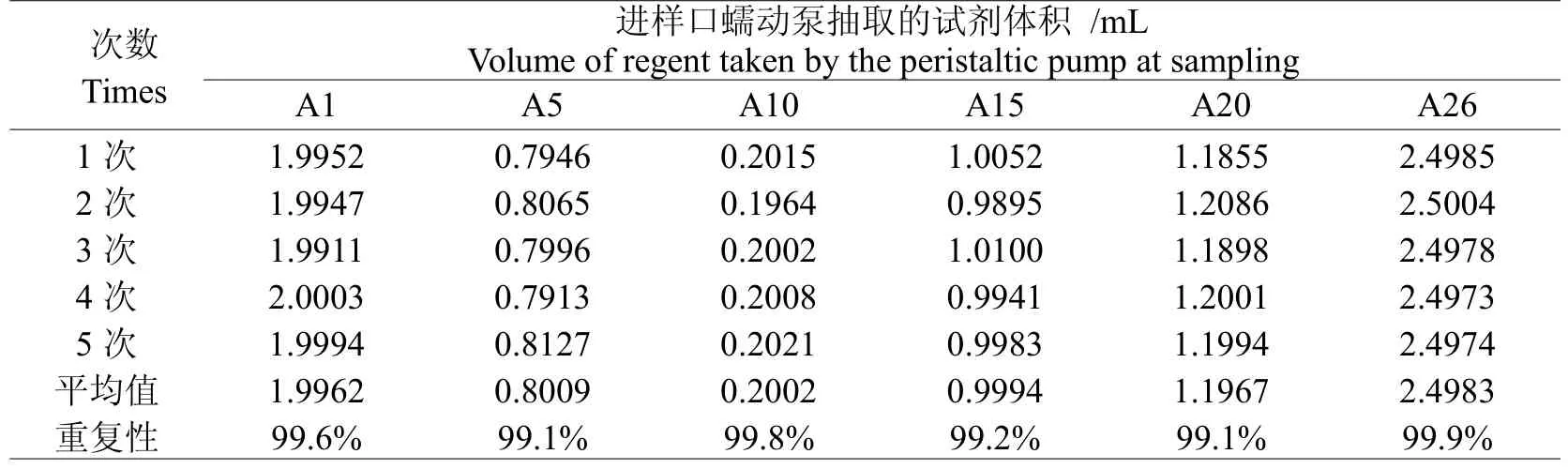
表1 進樣精確度測試實驗數據(單位:mL)Table 1 Test data of sampling precision
6 結論
開發先進的灌溉水質監測系統對于現代農業的發展具有重要的實用意義。本文利用單片機控制系統設計了灌溉水質監測儀流路進樣控制電路,同時增加了蠕動泵的驅動電路和多位閥的控制電路以提高進樣模塊穩定性與精確度,并完成了電路的測試實驗。實驗結果表明:測量值與理論值的相對誤差的絕對值小于2%,方差小于0.0001,流路進樣精度和測量精密度很高,流路控制系統具有很好的重現性。
[1]郭建,溫志渝,魏康林.多參數水質監測儀流路系統設計[J].自動化儀表,2012,33(2):80-82
[2]陳松柏,溫志渝,魏康林.水質監測微型蠕動泵穩定性實驗研究[J].實驗科學與技術,2012,10(6):14-17
[3]曹學飛,尹少平,印江.嵌入式觸摸屏接口電路及驅動設計[J].電力學報,2009,24(5):399-401
[4]武新,溫志渝,魏康林.新型多參數水質分析儀流路控制系統的設計[J].化工自動化及儀表,2011,4:20-24
[5]張營.ARM嵌入式系統的LCD驅動設計[[J].電子技術,2008,45(7):23-25
[6]Michael V Storey,Bram vander Gaag,Brendan P.Burns.Advances in on-line drinking water quality monitoring and early warning systems[J].Water Research,2011,45:741-747
Design of Control System for Water Quality Monitor in Irrigating Farmland
LIU Qi,WANG Ying
Jilin University of Chemical Technology,Jilin1320022,China
This paper designed the driving control circuit of flow injection module basedon single chip microcomputer technology,for agricultural irrigation water quality monitor flow sampling control system with high stability and high precision requirements,introducted the driving circuit of peristaltic pump and a number of valve control circuit,and performed a test for the circuit control accuracy.The experimental results showed that the design based on single chip microcomputer control circuit could improve the water quality monitor flow sampling circuit stability and the accuracy of the flow injection,laid the key technical basis for irrigation water quality monitor to improve the reliability.
Single-chip computer;irrigation agriculture water quality;flow control system;stability;high precision
X853
A
1000-2324(2014)05-0698-04
2013-03-11
2013-03-22
劉麒(1980-),男,漢族,吉林省延吉人,碩士,講師,研究方向:自動控制及儀器儀表.
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
當代水產(2019年1期)2019-05-16 02:42:04
當代水產(2019年3期)2019-05-14 05:42:48
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年14期)2018-08-21 01:38:16
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
水利規劃與設計(2016年7期)2016-02-28 15:06:27