電池管理系統的設計及荷電狀態的估算
2014-07-07 15:47:35劉騫孫紅
電源技術 2014年5期
關鍵詞:單片機
劉騫,孫紅
(沈陽建筑大學交通與機械工程學院,遼寧 沈陽 110168)
電池管理系統的設計及荷電狀態的估算
劉騫,孫紅
(沈陽建筑大學交通與機械工程學院,遼寧 沈陽 110168)
電池管理是汽車混合動力系統的關鍵技術之一。對混合動力汽車電池管理系統(BMS)的硬件和程序流程進行了設計,并采用徑向基函數(RBF)神經網絡對電池的荷電狀態()進行估算。使用RBF神經網絡算法估算可避免對電池內部復雜的電化學反應建模的過程,并可達到較高的精度。
電池管理系統;RBF;神經網絡;荷電狀態
混合動力是低碳時代汽車發展的重要方向之一,電池管理系統(BMS)對混合動力汽車的性能具有重要影響。BMS主要負責實時采集蓄電池組的電壓、充放電電流以及溫度等信息。它根據電流大小提供充放電保護,根據電壓高低來進行充放電控制,根據溫度信息判斷當前電池組的工作狀態,根據電池的電壓、電流、溫度等信息估算電池的荷電狀態()。BMS通過對動力電池組進行綜合管理和保護,達到延長電池使用壽命、提高使用效率、增加汽車續駛里程、提升電池可靠性的目的。
本文在前人探索的基礎上,設計出基于CAN總線的分布式BMS,并使用徑向基函數(RBF)神經網絡算法對電池的進行估算。
1 主要硬件電路的設計
本文中BMS整體布置形式為分布式。分布式BMS由一個主控制模塊和若干個功能相同的采集子模塊組成。主控制模塊負責完成電池信息的處理、荷電狀態的估算、電池組熱管理等功能,主控模塊與子模塊之間以及主控模塊與整車控制系統之間通過CAN總線進行通信。子模塊獨立實現電池信息采集、電池能量均衡等功能,各個子模塊與主控制模塊也是通過CAN總線進行通信。子模塊硬件設計方案如圖1所示,主要采集信息包括電流、電壓和電池工作溫度。
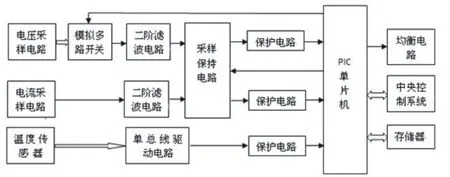
圖1 采集子模塊硬件設計方案
由于動力電池組通常采用串聯供電,所以電流的采集只需設置一個采集點即可。電流采集電路如圖2所示。本電路選擇CHB-200SF霍爾電流傳感器。CHB-200SF傳感器測量匝數比為1∶2 000,精度在±0.8%之內,線性度小于0.1%,反應時間小于1μs,該模塊具有較高的精度和線性度、較低的溫漂和較短的響應時間,足以滿足系統的設計要求。
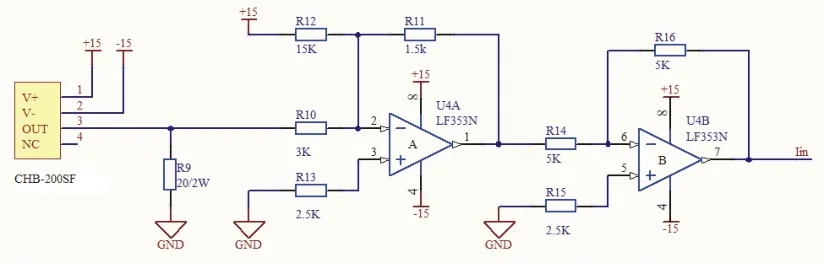
圖2 電流采集電路
在電池組充放電過程中,CHB-200SF霍爾電流傳感器輸出電流范圍為-0.15~+0.15 A,則輸出電壓范圍為-3~+3V。而作為微控制單元的PIC18F4580單片機的工作電壓為5 V,即A/D采樣的參考電壓為5 V,所以必須通過反向加法器和反相器將CHB-200SF傳感器輸出電壓調理為符合單片機的A/D轉換電壓的范圍。在圖2中,in為輸出到單片機A/D口的轉換電流,通過公式100×(in-3)計算可得到電池組的實際電流。
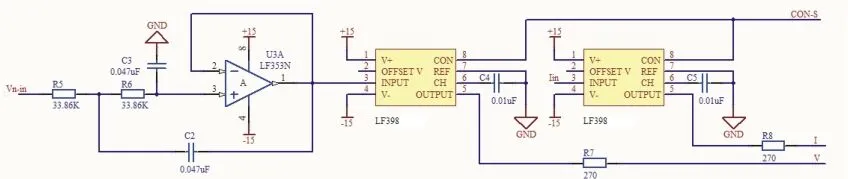
圖3 濾波及采樣保持電路
采樣隔離電路由差動電路和隔離放大器組成,差動電路采集電池單體電壓,并且消除溫漂的影響,隔離放大器將采集到的電池單體電壓與信息采集模塊隔離。此外,每個電池信息采集子模塊需要采集多塊電池單體的電壓數據,為了提高單片機A/D口的利用效率,電壓采集電路選用了2片16路模擬多路轉換開關芯片CD4O67,可以實現對多達32塊電池單體電壓的循環采集。另外,由于電池組的負載多種多樣,電池電壓上容易出現各種高頻信號。所以,電壓采集電路采用截止頻率為100Hz的巴特沃斯二階低通濾波器,將電壓信號濾波以提高信號采集精度。采樣保持放大器LF398的作用是保證采集到的是同一時刻的電壓和電流。
溫度采集選擇DS18B20單總線數字溫度傳感器。它直接將溫度信號轉換成數字信號,相對于輸出模擬信號的傳感器而言,省卻了將信號進行“濾波-放大-A/D轉換”的過程,提高了溫度采集系統的精度和響應時間。
由于單片機的驅動能力有限,再加上導線分布電容和能量衰減的影響,單片機I/O口可連接的DS18B20的數量和傳輸距離受到限制。實驗表明,當單總線上掛接的DS18B20超過8個,就會出現溫度轉換誤差較大的情況[10],因此在DS18B20數量較多時,就需要解決總線驅動的問題,否則可能造成系統不能正常工作。驅動電路如圖4所示,該電路由74LS244驅動器和門電路組成。74LS244為3態8位緩沖器,一般用作總線驅動器。74LS244的2A1和1Y1端口與單片機的RE0端口相連,74LS244的1A1和2Y1端口與DS18B20溫度傳感器的DQ線相連。在某一時刻驅動器74LS244只能向一個方向傳輸數據,數據傳輸方向由單片機的RE1端口根據DS18B20的操作時序進行控制。在這種驅動方式下,可以實現在較長的數據線上掛接超過24個的DS18B20傳感器,足以滿足子模塊對溫度采集點數目的要求。這個驅動電路只使用了兩個I/O端口,單片機端口利用效率較高。
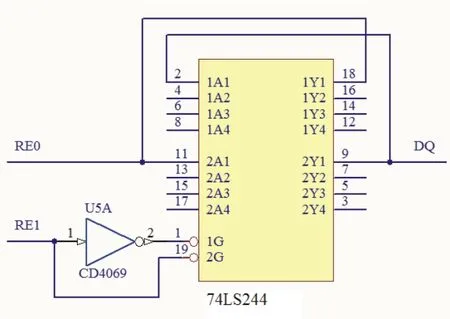
圖4 DS18B20驅動電路
BMS使用CAN總線進行通信。CAN總線即控制器局部網(controller area network)總線,屬于現場總線范疇,具有抗干擾能力強、實時性好、自動出錯處理及故障保護的特點,可以應用在環境復雜、可靠性要求高的領域。
由于本文使用的PIC18F4580單片機帶有CAN總線控制器,因而只需要設計接口電路即可。接口電路使用PCA82C50作為CAN總線驅動器,用于CAN協議控制器和物理總線間的接口,此元件對總線提供差動發送功能,對CAN控制器提供差動接收功能。接口電路通過高速光耦6N137實現與CAN總線上其他節點的電氣隔離。6N137電路采用兩個不同的電源供電,這兩個電源通過DC-DC電源隔離模塊完全隔離,從而提高了節點的安全性和穩定性。
2 基于RBF神經網絡的電池估算
神經網絡學習和測試的數據均來自于美國國家可再生能源實驗室開發的電動汽車仿真軟件Advisor的計算結果。在Advisor軟件中,配置車型并選擇工況。配置氫氧燃料電池與蓄電池的混合動力車型,蓄電池型號為ESS_L17_TEMP鋰離子電池。在神經網絡的學習過程中采用3UDDS+1HWFET混合工況,其中UDDS工況是用于測試車輛在城市道路下各種性能的循環工況,HWFET工況則代表了高速公路的運行工況。神經網絡的測試選擇INDIA_URBAN_SAMPLE工況。學習和測試兩組工況下具體的車速-時間曲線如圖5所示。在選定的車型和工況下,用Advisor計算得到該車型鋰電池組的電壓、電流、工作溫度和等信息,作為RBF神經網絡學習和測試的數據。由于Advisor得到的電池信息與電池實際使用中測得的數據相差不大,所以把Advisor計算得到的數值看成是實際值,用于神經網絡的學習和測試[3]。
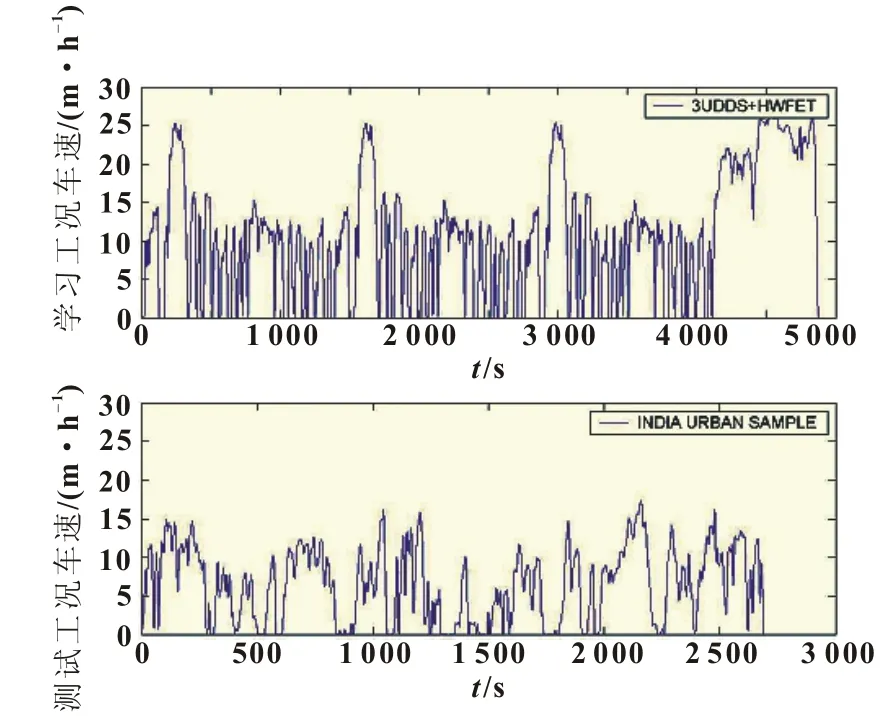
圖5 神經網絡學習和測試的汽車運行工況
神經網絡模型選擇RBF神經網絡。RBF神經網絡是一種單隱層的三層前饋網絡,包括輸入層、中間層和輸出層。學習時,將上述車型在3UDDS+1HWFET混合工況下得到的電池數據作為神經網絡學習的輸入層值和目標輸出層值,設均方誤差目標值為10-4,使用Matlab中的net=new rb(P,T,goal, spread,MN,DF)函數進行網絡設計,最終確定中間層神經元數目為7個。
測試時,將上述車型在INDIA_URBAN_SAMPLE工況下得到的電池各時刻的電壓、電流、工作溫度及初始時刻的導入輸入層,經過RBF神經網絡的運算,在輸出層得到電池在使用過程中的。將RBF神經網絡預測得到的值和在Advisor中得到的目標輸出值進行比較,結果如圖6所示。圖6中顯示預測值與目標值誤差基本控制在2%以內,所以可以采用RBF神經網絡來預測蓄電池組。
3 主控模塊程序的設計
主程序流程如圖7所示。主程序負責BMS初始化、電池信息采集、電池狀態判斷、SOC估算和CAN通信等子程序的調用,使各個子模塊能夠協調穩定地工作。
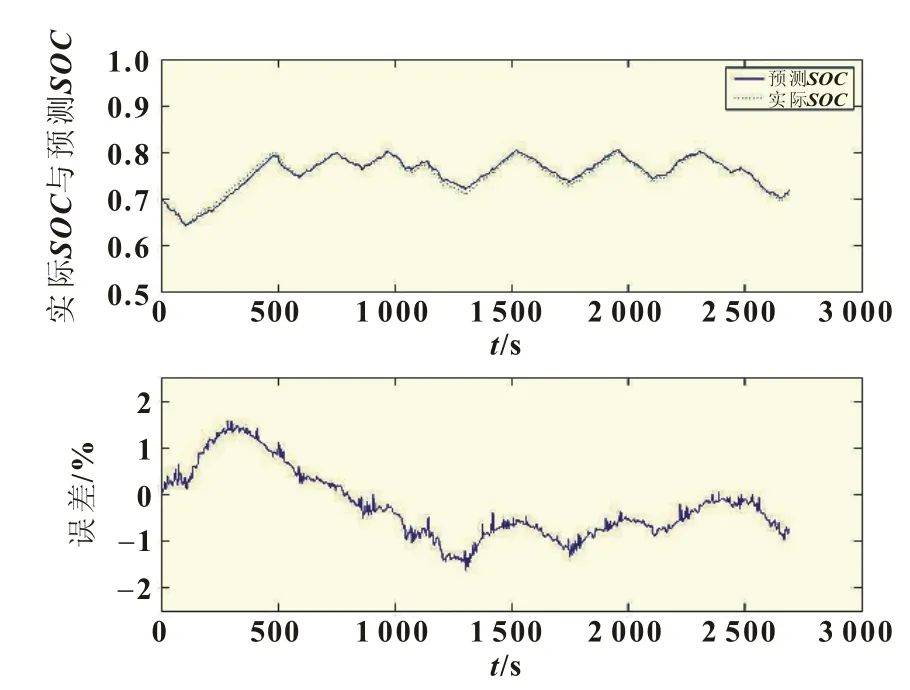
圖6 RBF神經網絡的預測值與實際值的比較及估算誤差
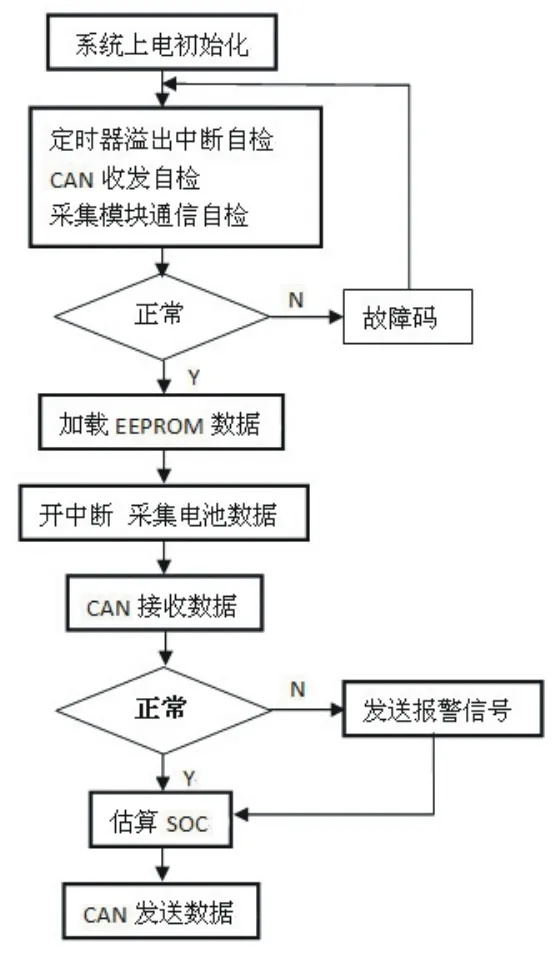
圖7 主程序流程圖
在BMS的工作過程中,采集子模塊將采集到的電壓、電流、溫度信息通過CAN總線實時傳送到主控模塊。由于蓄電池的開路電壓與其之間可以看成線性關系,因此的初始值可以根據電池在開始工作前的開路電壓得到。在電池工作過程中,主控模塊根據電池實時的電壓、電流、溫度和上一時刻的計算得到電池實時的。此外,主控模塊還對電池的工作狀態進行判斷,當電池工作異常時將發送報警信號并進行熱管理或過充過放電的保護。
4 結語
本文設計的分布式BMS可實現電池信息的循環采集、信息處理、的估算和電池工作狀態的判斷,并通過CAN總線與汽車其它模塊進行通信,基本滿足對汽車動力電池組實時監控的需要。使用RBF神經網絡對電池進行估算,可以降低電池建模的難度,并且達到了較高的估算精度。
[1]ZHU C B,WANG T C,HURLEYW G.A new state of charge determ ination method for battery management system[J].Journal ofHarbin Institute of Technology(New Series),2004,11(6):624-630.
[2]岳仁超.電池管理系統的研究[D].北京:北京交通大學,2010.
[3]李紹梅.Plug-In混合動力汽車動力電池估計研究[D].山東:山東大學,2010.
[4]何莉萍,趙曦,丁舟波,等.基于DSP的電動汽車電池管理系統的設計[J].湖南大學學報:自然科學版,2009,36(5):33-36.
[5]黃文華,韓曉東,陳全世,等.電動汽車估計算法與電池管理系統的研究[J].汽車工程,2007,29(3):198-202.
[6]QIANG JX,AO GQ,YANG L.Estimationmethod on the battery state of charge for hybrid electric vehicle[J].Chinese JournalofMechanical Engineering,2008,21(3):20-25.
[7]SANTHANAGOPALAN S,WHITER E.State of charge estimation using an unscented filter for high power lithium ion cells[J].International Journalof Energy Research,2010,34(2):152-163.
[8]張巍,王艷,殷天明,等.基于DSP的電動汽車電池管理系統的設計[J].微計算機信息,2009,25:238-239.
[9]張鑫,馬茲林,冒曉建,等.混合動力車用蓄電池管理系統設計與研究[J].車用發動機,2010(6):46-49.
[10]宋炳雨,高松,鐘磊,等.DS18B20溫度傳感器在電動汽車電池管理系統中的應用[J].山東理工大學學報:自然科學版,2010,24(5):82-85.
Design of BMSand estimation of
LIU Qian,SUN Hong
Battery management is one of the key technologies of electric vehicle hybrid power system.The hardware and software processes of batterymanagement system(BMS)ofhybrid electric vehicle were designed,and the state of charge()was estimated by radial basis function(RBF)neural network.Theestimation based on RBF neuralnetwork algorithm could avoid the modeling process of com plex electrochem ical reaction in battery,achieving high estimation accuracy.
BMS;RBF;neuralnetwork;
TM 912
A
1002-087 X(2014)05-0897-03

2013-10-28
國家自然科學基金(51176131);遼寧省自然科學基金(20102187);沈陽市科技計劃項目(F11-264-1-01)
劉騫(1986—),男,河北省人,碩士研究生,主要研究方向為車輛新能源技術。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
