基于定位信息的天線伺服系統的設計與實現*
2014-07-11 08:49:18鄧江安
艦船電子工程 2014年7期
鄧江安 金 晟 李 銳
(91550部隊 大連 116023)
1 引言
本文所研制的天線伺服系統應用于對海微波通信系統中,對海微波通信系統由岸站和海上移動站組成。岸站天線為定向天線,由于定向天線的波束角與天線增益成反比,波束角越窄,天線增益越高,因海上微波傳輸特性的復雜性,為提高電平儲備,對海微波傳輸系統的岸站天線通常采用波束角較窄的定向天線[1~2],因傳統的利用信標機的天線伺服系統價格昂貴,未配備伺服,岸站天線對準海上移動站主要靠電平變化手動調節,存在調節不及時,調節不準的問題,嚴重影響了微波通信質量。隨著當前北斗和GPS應用越來越普及,利用海上移動站定位信息實時計算岸站天線指向,以此為依據來控制天線指向,是一種簡單可行的方法。
本文主要介紹了基于定位信息的天線伺服系統的構成,并重點介紹了中心控制臺和天線控制器的具體實現。
2 系統結構
系統主要由中心控制臺、天線控制器和天線轉臺三個部分組成,系統組成示意圖如圖1所示。

圖1 系統組成示意圖
中心控制臺接收移動站定位信息,根據岸站天線位置計算出其應該指向角度,與從天線控制器獲取的天線當前指向角度作對比,形成控制信息送往天線控制器,由控制器控制天線轉臺上的電機轉動。天線控制器接收天線轉臺上旋轉變壓器傳來的電信號,轉換為角度數字值,回送給中心控制臺,天線控制器同時通過繼電器控制天線轉臺轉動。
3 中心控制臺的設計與實現
中心控制臺硬件配置為一臺計算機,通過串口控制天線控制器(多個串口可控制多臺控制器)。中心控制臺軟件采用Visual C++6.0開發,電子海圖采用MapX ActiveX控件來實現[3~4]。網絡通信和串口通信采用多線程方式實現,保證信息傳輸的實時性。
中心控制臺接收移動站定位信息及天線狀態信息,在GIS海圖上實時顯示。當收到移動站位置信息后,計算岸站天線的指向,將控制信息送往天線控制器。天線指向角的計算涉及到已知兩點的GPS位置,獲取兩點間連線與正北方向夾角的問題,算法如下:
1)通過兩點大地坐標,計算兩點間連線與正北方向夾角的算法[5~7]
算法中用到的坐標系有三種,分別是大地坐標系、測量坐標系和地心直角坐標系。大地坐標系是由大地經度、大地緯度和大地高構成的坐標系,系統所獲取的移動站定位信息都是基于大地坐標系;測量坐標系也稱站心地平坐標系,即以測站法線和子午線方向為依據建立的坐標系,天線指向角計算是在測量坐標系下進行的;地心直角坐標系是坐標原點位于地球質心,由X軸、Y軸和Z軸所組成的笛卡兒坐標系,Z軸與地球平均自轉軸重合,X軸指向子午面與赤道面的焦點,Y軸方向與X軸和Z軸所組成的平面垂直,且指向為東,地心直角坐標系是大地坐標系向測量坐標系轉換的中介。
根據岸站天線G1點大地坐標(Gj1Gw1Gh1)和海上移動站G2點大地坐標(Gj2Gw2Gh2),求G1點與G2點間連線與正北方向夾角。
首先進行大地坐標系向地心直角坐標系的轉換,公式如下:
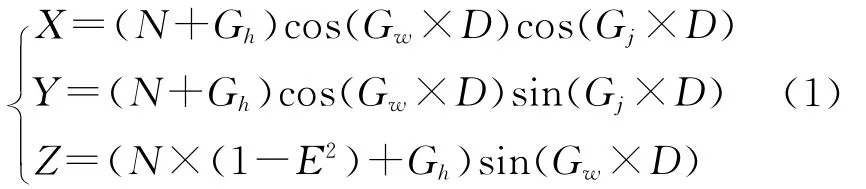
其中(GjGwGh)為大地坐標,(XYZ)為地心直角坐標,D=π/180為角度轉換到弧度的常量,L1=6378140為地球長軸,L2=6356755為地球短軸,地球第一偏心率E=,中間量N=
將G1點和G2點大地坐標按上述方法轉換為地心直角坐標。G1點地心直角坐標為(X1Y1Z1),G2點地心直角坐標為(X2Y2Z2)。
然后求G1點地心直角坐標系到測量坐標系的轉換矩陣MG1。
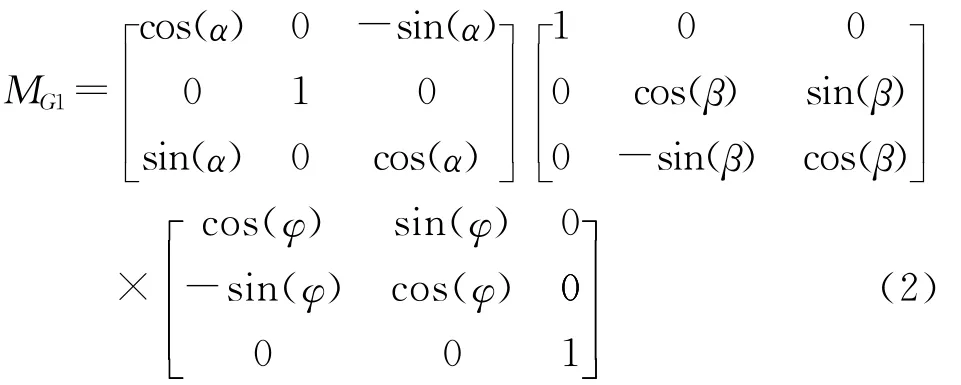
其中α為繞Y軸的旋轉角度,值為-π/2;β為繞X軸的旋轉角度,值為Gw1D;φ為繞Z軸的旋轉角度,值為(Gj1-90)D。
接著求地心直角坐標系下G1點到G2點的方向向量
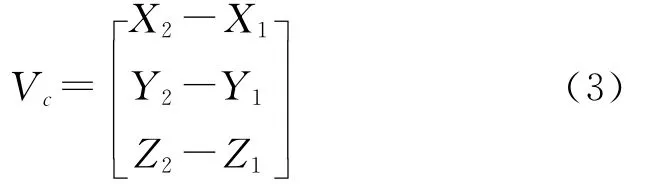
將方向向量Vc轉換到測量坐標系下

最后獲得與正北方向的夾角

2)中心控制臺對天線轉臺的控制
中心控制臺通過串口發送天線控制指令,控制天線轉動,對天線轉臺的控制采用異步控制方式,每次發送控制指令后,不跟蹤控制結果。程序采用定時方式,每隔250ms向天線控制器發送狀態查詢指令,接收到天線轉臺狀態信息后,依據控制命令和天線控制器當前狀態發送相應控制指令,發送指令后不管是否成功,待下次接收到狀態信息后再重新進行控制操作。此種控制方式容錯性好,每秒進行四次控制操作,當一次出現錯誤時,下次可重新進行控制操作,滿足天線控制的實時性要求。
4 天線控制器設計
控制天線轉動的轉臺控制設備由天線控制器、旋轉變壓器、執行電機及連接電纜組成。其中,天線控制器是控制核心,其原理框圖及與其他部分的關系如圖2所示。

圖2 天線控制器原理框圖
天線控制器主要包括微處理器(MCU)、軸角轉換電路(RDC)、對外接口及功率驅動電路等。
1)微處理器
微處理器是整個單元的核心,選用ATMEL公司的AVR系列ATMEGA128單片機。AVR單片機是ATMEL公司推出的全新配置的精簡指令集單片機。ATMEGA128內部配置有128K Flash、4KEEPROM、4KSRAM 等存儲器及A/D、定時器、UART、SPI、WDT等豐富的外設,端口驅動能力達到20mA,工作電壓范圍寬,具有工業級的環境適應能力,完全滿足系統功能需求[8]。
2)軸角轉換電路
軸角轉換電路選用“旋轉變壓器+RDC”方案。
旋轉變壓器是一種電磁式傳感器,又稱同步分解器。它是一種測量角度用的小型交流電動機,用來測量旋轉物體的轉軸角位移和角速度,由定子和轉子組成。其中定子繞組作為變壓器的原邊,接受勵磁電壓,勵磁頻率通常用400Hz或1000Hz。轉子繞組作為變壓器的副邊,通過電磁耦合得到感應電壓。旋轉變壓器的工作原理和普通變壓器基本相似,區別在于普通變壓器的原邊、副邊繞組是相對固定的,所以輸出電壓和輸入電壓之比是常數,而旋轉變壓器的原邊、副邊繞組則隨轉子的角位移發生相對位置的改變,因而其輸出電壓的大小隨轉子角位移而發生變化,輸出繞組的電壓幅值與轉子轉角成正弦、余弦函數關系[9]。
旋轉變壓器(以下簡稱旋變)作為測角元件直接安裝在轉臺軸上。當旋變的定子部分加有激磁信號時,其轉子部分輸出感應信號的幅度與天線軸角成正余弦關系。我們采用單極旋變,旋變提供兩路輸出。設激磁信號V=VmSin(ωt),轉臺轉角為θ時,則規格化的旋變輸出的兩路信號為:KVmSinθSin(ωt)和KVmCosθSin(ωt)。將這些信號和振蕩參考信號一起送到RDC芯片,RDC便可轉換出角度θ。
RDC(Resolver-to-Digital Converter)芯片,是一種跟蹤轉換器,它實際上是一種Ⅱ型伺服環路,當KVmsinθsin(ωt)和KVmcosθsin(ωt)分別送入芯片的sin和cos輸入引腳后,經過其內部運放再送至乘法器中,此時若內部可逆計數器輸出的初始數字角φ也被送入乘法器,則經乘法器運算后得到的輸 出 信 號 為Vsin(ωt)sinθcosφ和Vsin(ωt)cosθsinφ,二者再進行相減運算得到輸出信號Vsin(ωt)sin(θ-φ),這個交流誤差信號由相敏檢測器利用參考信號sin(ωt)進行解調,產生一個正比于sin(θ-φ)的直流誤差信號,該誤差信號送給積分器,積分器輸出驅動VCO,VCO輸出脈沖給可逆計數器,直至sin(θ-φ)=0,此時θ-φ=0或θ=φ,數字輸出角度代表角度θ。數字輸出角度自動地跟蹤輸入,完全不需外部轉換命令[10]。
軸角轉換電路示意圖見圖3,激勵源采用XR2206CP芯片,配合外圍功放電路產生1KHz正弦波信號,送往安裝在天線轉臺的旋轉變壓器。經過旋轉變壓器轉換后的調制正弦波信號和調制余弦波信號通過放大電路后送往RDC芯片AD2S83AP,由RDC芯片轉換為角度數字值。RDC芯片的數據接口與核心處理器的PORTC端口相連,RDC轉換后的數據是16位,核心處理器先讀取低8位,再讀取高8位。
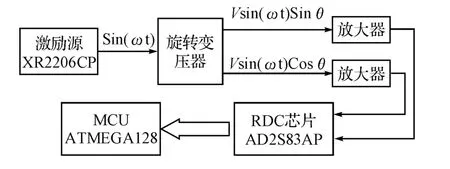
圖3 軸角轉換電路示意圖
5 結語
文中詳細介紹了基于定位信息的天線伺服系統設計及具體實現,該系統利用當前相當成熟的GPS定位技術,通過直接計算天線的指向來控制天線轉動,方法簡單而實用。通過加裝本系統,岸站天線始終對準海上移動站,信號電平穩定,通信質量大大提高。此系統在實際應用中取得了良好的效果,具備了很好的工程應用價值。
[1]劉光輝,程芳.海上微波通信傳輸特性與衰落改善研究[J].艦船電子對抗,2011,34(2):47-50.
[2]林開泉,曹岳海,黃玉林.2.4GHz微波海上傳播特性研究[J].艦船電子工程,2013,33(3):53-55.
[3]朱恩亮,王勇等,王光耀,等.基于MapX的電子海圖顯示系統開發[J].船海工程,2008,37(5):127-129.
[4]靳海亮,劉慧杰,苗保亮.基于 MapX控件的GIS應用軟件基本功能二次開發[J].計算機與數字工程,2011,39(1):61-63.
[5]朱元彪,陳華.工程常用坐標轉換方法研究與分析[J].測繪信息與工程,2012,37(2):35-37.
[6]李娜,于淼.GPS坐標向北京54坐標轉換的方法[J].北方交通,2012(8):36-37.
[7]胡川.GPS平面坐標轉換模型研究[J].科技廣場,2009(11):43-44.
[8]丁化成,耿德根,李君凱.AVR單片機應用設計[M].北京:北京航空航天大學出版社.2002.2-4.
[9]徐建華,楊瑞峰.基于AD2S83的角位移測量模塊設計[J].微計算機信息,2008,24(7):183-184.
[10]呂云峰,羅明西,何華強.基于RDC模塊的角度測量儀的設計與實現[J].海軍工程大學學報,2011,23(3):77-81.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
通信電源技術(2018年3期)2018-06-26 06:33:30
現代工業經濟和信息化(2016年4期)2016-05-17 05:35:38
通信電源技術(2016年3期)2016-03-26 07:13:46
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
電測與儀表(2014年12期)2014-04-04 12:10:16
