環境激勵下船舶結構模態參數識別方法綜述
2014-07-18 11:35:02崔洪宇
船舶 2014年5期
洪 明 雷 川 崔洪宇
(大連理工大學 船舶工程學院 大連116024)
環境激勵下船舶結構模態參數識別方法綜述
洪 明 雷 川 崔洪宇
(大連理工大學 船舶工程學院 大連116024)
基于模態分析理論,對環境激勵下的模態參數識別方法進行歸納總結,討論了不同模態參數識別方法的基本思想和優缺點,并著重介紹船舶航行狀態下的模態參數識別。文章對國內模態參數識別的研究熱點問題進行了闡述,為相關科研人員研究環境激勵下模態參數識別提供了有益參考。
環境激勵;模態參數識別;船舶結構;運行模態分析
引 言
船舶航行過程中,結構會受到來自螺旋槳、主機及風浪流等激勵作用,不可避免地會產生結構振動。船舶振動不僅會影響船上人員生活的舒適性,還會對船上設備及船舶結構自身強度帶來危害,因此船舶振動問題逐漸引起人們的重視。
一般的振動問題由激勵(輸入)、結構(系統)和響應(輸出)三部分組成,根據研究目的不同,通常將振動問題分為圖1所示三種基本類型。
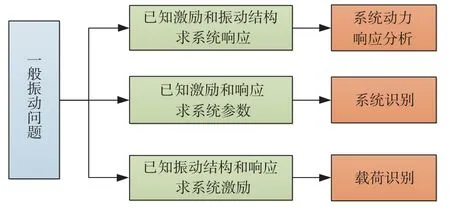
圖1 振動問題分類
振動結構模型可以用三種形式來描述,分別是物理參數模型、模態參數模型和非參數模型[1]。解決振動問題時最為關注的是模態參數模型,它包括結構的模態頻率、振型和阻尼比等參數,而模態分析理論就是以振動理論為基礎,以模態參數為目標的分析方法。根據模態分析方法的不同,模態分析理論可以分為理論模態分析、實驗模態分析(EMA)和運行模態分析(OMA)[2],由于運行模態分析的應用特點及實施理論難度,近年來基于環境激勵下的模態分析方法越來越受到青睞,以下本文主要討論運行模態。
1 模態參數識別方法
傳統的模態參數識別方法,通過在結構上人工施加激勵,已知激勵和響應,采用信號處理技術計算系統的頻響函數或脈沖響應函數,再運用參數識別方法得到系統的模態參數。傳統的模態分析方法按識別域的不同可分為頻域法和時域法,頻域法是以頻響函數為基礎的參數識別方法,時域法則是以脈沖響應函數或自由振動響應為基礎的參數識別方法;按處理各階耦合模態所用方法的不同,可分為單自由度法和多自由度法,單自由度法基本思想是將具有多階模態的多自由度系統視作多個單自由度系統進行識別,適用于阻尼小且相鄰模態分離較遠的系統,多自由度法則是對頻響函數曲線上的各共振峰同時擬合,在感興趣的頻帶內考慮各階模態的耦合與相互影響;按照使用激勵和響應的數目不同,又可以分為單輸入單輸出(SISO)、單輸入多輸出(SIMO)及多輸入多輸出(MIMO)識別方法,其中SISO屬于局部識別方法,SIMO和MIMO屬于整體識別方法[3]。
以船舶結構為代表的大型結構物傳統實驗模態分析方法需要同時已知激勵與響應,才能通過構造頻響函數對系統參數進行識別,然而實驗過程中很難對船體結構施加有效激勵。激勵過小,能量不足以激起船舶結構的振動;激勵過大,容易導致局部結構發生塑性變形等強度問題。由此,基于環境激勵的運行模態分析方法顯現出優勢,僅需要船舶在航行狀態測量的振動響應信號,便可識別系統的模態參數。基于環境激勵的運行模態分析技術,一方面可識別船體的振動模態,判斷其是否與船上激勵源發生共振,還可與設計預報結果進行對比,積累預報經驗;另一方面可對振動量級過高區域進行分析,得到該區域有害振動的主要頻率成分,對比激勵源頻率可以確定有害振動來源,并可以根據分析得到的模態振型,對振幅較大位置采取減振措施[4]。
2 環境激勵下模態參數識別方法概述
基于環境激勵模態參數識別方法,按照信號識別域可分為頻域法、時域法以及聯合時頻域法[5]。頻域法大多利用經典譜估計,對于輸入信號已知的實驗狀態進行頻域模態分析,根據頻響函數在系統固有頻率峰值特征進行模態識別;基于環境激勵下的模態分析,由于無法直接求得頻響函數,所以一般使用功率譜密度函數近似地代替頻響函數,基于功率譜密度函數進行模態識別的方法主要有峰值拾取法和頻域分解法。
時域法屬于現代譜分析的范疇,其算法思想大致有兩種:第一種直接利用響應信號求系統模態參數,如基于數據的隨機子空間法以及ARMA時序分析法;第二種先需要對信號進行處理,配合自然激勵技術或隨機減量技術,得到中間時間序列如相關函數、近似的自由響應或脈沖響應信號等,然后利用經典時域模態識別方法進行參數識別,如ITD法、最小二乘復指數法、多參考點復指數法、基于協方差的隨機子空間法以及特征系統實現法等[6]。
無論頻域法還是時域法都是基于傅里葉變換進行模態識別的,但由于傅里葉變換自身不能反映信號的瞬時性即信號在時頻域內的變化規律,因此能夠在時頻域內反映信號能量分布情況的時頻分析開始成為學者研究的熱點,其中小波變換和Hilbert-Huang變換是最為經典的兩種時頻分析方法,它們都能夠根據信號的時間-尺度特征自適應地對系統進行模態識別,彌補了頻域法和時域法在處理非穩態環境信號和非線性系統模態識別的不足,擴展了模態參數識別的應用領域[7]。圖2所示為常見的基于環境激勵的模態參數識別方法以及模態識別過程中應用到的關鍵技術,本文將給出這些算法的數學模型和算法思想,并重點闡述這些算法的適用性和優缺點。
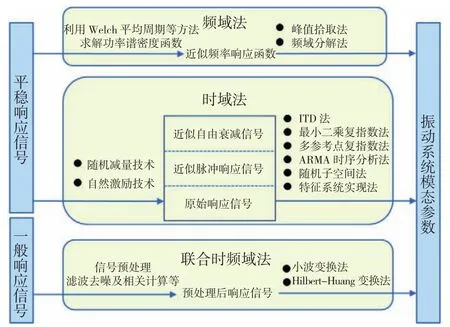
圖2 環境激勵下模態參數識別方法分類
2.1 頻域法
2.1.1 峰值拾取法
峰值拾取法[8]的基本思想是系統的頻響函數在其固有頻率處會出現峰值點,由于環境激勵前提為白噪聲信號,白噪聲信號的功率譜密度函數在一定頻率范圍內近似均勻分布,因此可以利用輸出響應的功率譜密度函數近似代替頻響函數。另外該方法假定隨機響應的功率譜密度函數峰值僅由一個模態確定,這樣系統的固有頻率可以由功率譜密度函數的峰值得到,利用識別結果撓度分布就可近似表示模態振型。峰值拾取法的優點是算法簡單且識別效率高;缺點是環境激勵需滿足白噪聲特征,且不能識別密集模態和阻尼比,由于對功率譜密度函數峰值選取存在主觀性,所以其識別精度受到影響。
2.1.2 頻域分解法
頻域分解法是峰值法的改進算法,主要用來解決峰值法難以處理密集模態的問題。頻域分解法對功率譜密度函數矩陣進行奇異值分解(SVD),將系統響應的功率譜密度函數分解為對應多階模態的一系列單自由度系統功率譜密度函數,然后利用峰值法識別模態參數。頻域分解法是峰值法的一種延伸,它不僅繼承了峰值法算法簡單、識別效率高的優點,還能識別密集結構的模態參數,而且由于采用了SVD技術,所以對噪聲也有一定的抗干擾能力,識別精度較峰值法有所提高。
張毅剛等[9]針對峰值法進行空間網格結構模態參數識別時會遇到遺漏模態及重復頻率無法篩選的問題,對峰值法進行了改進,提出在獲得所有測點平均正則化功率譜基礎上,結合結構的理論振型特點計算輔助正則化功率譜,取兩者并集為模態識別結果,通過典型結構監測結果驗證了改進后的功率譜峰值法的有效性,圖3為實驗測得的平均正則化及輔助正則化功率譜密度函數曲線[9]。
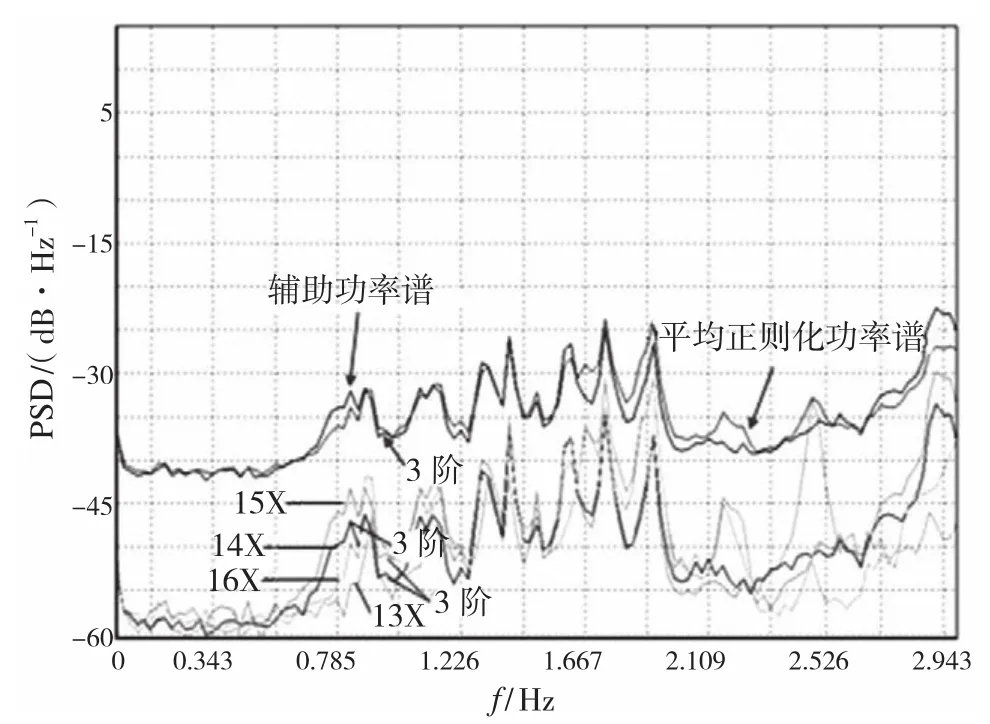
圖3 平均正則化及輔助正則化功率譜密度函數曲線
夏祥麟[10]對簡支梁分別進行了峰值拾取法和頻域分解法研究,發現頻域分解法在保留了峰值法識別快速直觀的基礎上,摒除了峰值由單一模態貢獻的假定條件,具有一定的抗噪性能,但是對于非白噪聲信號及大阻尼系統,頻域分解法的識別效果并不準確;Brincker等[11]在頻域分解法的基礎上對算法進行改進,其基本思想是將分解后的單自由度功率譜密度函數進行逆傅里葉變換,在時域內計算得到相關函數后,利用指數衰減法計算頻率和阻尼比,改進后的頻域分解法可直接在時域內完成頻率和阻尼比的計算,使得對頻率的求解不再依賴FFT分辨率的影響。
2.2 時域法
2.2.1 基于原始響應信號的時域法
(1)ARMA時序分析法
1969年Akaike[12]首次使用自回歸滑動平均模型進行白噪聲環境激勵下的模態參數識別。ARMA時序分析法的基本思想是利用差分方程和Z變換,分別建立強迫振動方程傳遞函數與ARMA模型間等價關系,直接使用隨機激勵和響應信號,并采用ARMA模型結合最小二乘法來識別系統模態參數。ARMA時序分析法屬于SISO參數識別法,用一個測點就可以識別出系統各階模態參數。ARMA參數模型包括AR自回歸模型、MA滑動平均模型和ARMA自回歸滑動平均模型。
對確定性系統,系統輸入和輸出關系為:

該式稱為系統的自回歸滑動平均模型。式中:ai和bi分別稱為自回歸系數和滑動平均系數,如果bi= 0,則上式變為即AR自回歸模型;如果ai= 0,則即MA滑動平均模型,所以AR模型和MA模型是ARMA模型的兩種特殊情形。
ARMA時序分析法不受觀測樣本長度限制,不存在能量泄露的問題,且識別精度較高;缺點是在建立時序模型時系統的階次難以確定。郭永剛等[13]利用單位脈沖響應函數與ARMA模型Green函數等價的特點,通過脈沖響應函數來估計系統響應的自相關系數;然后建立推廣的Yule-Walker方程以求得ARMA模型自回歸系數并進行參數識別,在其算例研究中發現為保證識別結果的精度需建立較高階數的ARMA模型,但模型階數過高又會導致識別計算量劇增;Smail等[14]針對基于ARMA模型的模態識別方法系統階次難以確定的問題,提出利用輸出信號相關矩陣特征值個數來確定系統階次,取得了較好的識別結果。
(2)數據驅動的隨機子空間法
數據驅動的隨機子空間法是由Overschee等于1991年提出的[15],算法直接將原始響應數據作為輸入部分形成Hankel矩陣,利用QR分解和SVD技術獲得擴展的可觀測矩陣,并利用卡爾曼濾波狀態序列結合最小二乘法識別出系統的模態參數。
數據驅動的隨機子空間法相對于協方差驅動的隨機子空間法最大區別有兩點:一是不需要進行相關函數的計算,提高了算法的識別效率;二是采用QR分解技術,研究表明QR分解能夠很大程度上提高隨機子空間法的識別精度。辛峻峰等[16]在理論上探討了協方差驅動和數據驅動兩種隨機子空間法的不同,并通過相應的數值模擬驗證基于QR分解的數據驅動隨機子空間法無論計算精度或對較弱勢模態的識別能力均明顯優于協方差驅動隨機子空間法,辛峻峰等[17]還對隨機子空間法深入分析噪聲與數據驅動的隨機子空間法Hankel矩陣維數之間的關系,并提出一種評估隨機子空間法矩陣維數選擇優劣的方法;常軍等[18]就隨機子空間法中存在的虛假模態問題進行分析,表明產生虛假模態的原因主要有兩方面:一方面是由于隨機子空間法的算法本身而導致;另一方面是由于輸入信號不滿足白噪聲假定或者輸出信號受到環境干擾而引起;章國穩等[19]針對數據驅動的隨機子空間法計算效率低下的問題,提出一種基于特征值分解的隨機子空間法,通過模型研究證明該方法在保持計算精度的基礎上提高了隨機子空間法的計算效率。數據驅動的隨機子空間法適用于線性結構平穩激勵下的模態參數識別,對輸出噪聲也有一定的抗干擾能力,但仍不可避免地會遇到虛假模態的問題;此外,狀態空間方程中系統階次的確定是限制所有基于狀態空間方程方法運算速度和精度的最主要因素,基于狀態空間方程的隨機子空間法也存在同樣的問題。
2.2.2 基于自由響應或脈沖響應信號的時域法
(1)隨機減量技術(RDT)
對于船舶等大型結構物來說,工程實際中容易得到的是隨機響應信號,但是很多時域模態識別方法是以自由振動響應為數學模型的,所以需要從隨機響應信號中提取出某種自由振動響應信號。RDT法是利用樣本平均的方法,通過設置一定的觸發條件去除響應中的隨機成分,獲得初始激勵下的自由振動響應,然后通過相應的時域法識別出系統的模態參數。Cole[20]首先提出RDT法,并將其成功應用于空間飛行器模型結構的模態識別;Ibrahim[21]將RDT法同ITD法相結合用于結構運行模態參數的識別,并對RDT法中采用的觸發條件進行詳細闡述,同時在其論文中強調RDT法僅適用于白噪聲激勵。由于RDT法建立在線性系統疊加原理的基礎上,所以不能用來分析非線性系統;另外RDT法利用了白噪聲激勵下系統產生的平穩響應方差為零這一特性,所以RDT法僅能用于處理平穩隨機信號。
(2)自然激勵技術(NExT)
NExT法的基本思想是白噪聲環境激勵下結構兩點間響應的互相關函數和脈沖響應函數有近似的表達式,求得兩點間響應的互相關函數后,將其作為輸入信號進行模態參數識別。美國SADIA國家實驗室的James等[22]在1994年提出NExT法,并且將該方法運用于汽輪機葉片在工作狀態下的固有頻率和模態阻尼的測試。
對自由度為n的線性系統,當系統k點受脈沖激勵時,i點的脈沖響應寫成如式(2)所示:

從上式可以發現,i和j兩點之間的互相關函數可看成一系列衰減簡諧函數的組合,同兩點間脈沖響應函數具有相同表達形式,故可將NExT法與基于脈沖響應時域方法結合起來進行模態參數識別。
羅奎[23]分別用NExT結合ITD法以及NExT結合ERA法對環境激勵下三跨混凝土連續橋進行振動試驗模態參數識別,發現NExT法由于對響應信號進行互相關函數的計算,其對噪聲的抗干擾能力較強;紀曉東等[24]綜合自然激勵技術和特征系統實現算法,進行模擬環境激勵下結構的時域模態參數識別,通過改變結構質量和特征靈敏度分析,得到質量歸一化振型,通過模型實驗驗證了NExTERA法能應用于結構在線模態參數識別。
(3)ITD法
ITD法[25]是Ibrahim提出的一種SIMO參數識別方法,基本思想是直接使用各測點的自由響應信號,通過三次不同延時采樣,構造自由響應采樣數據的增廣矩陣,然后建立特征方程,求解出特征對后再估算各階模態參數,ITD法的最大特點是同時使用全部測點的自由響應數據。Ibrahim在ITD法的基礎上提出省時的STD法,STD法相對ITD法的計算量大為降低,節省內存和運算時間,在識別精度上也有所提高。
楊佑發等[26]結合隨機子空間法對ITD法進行算法改進,提出將隨機子空間法中計算得到Toeplitz矩陣作為輸入傳遞給ITD法,避免使用RDT法和NExT法進行前處理引起的誤差,實驗表明該改進后ITD算法相對于隨機子空間法識別精度沒有降低,而且縮短了計算時間,相對于傳統的ITD法,識別精度明顯有所提高;周凱[27]采用ITD法對環境載荷下一個近海導管架平臺結構模型進行模態參數識別,研究發現增多ITD法中虛擬測點的個數,增大特征矩陣的階數,不僅能增加識別出的模態數量,而且有助于降低其對噪聲的敏感度,虛擬測點個數對系統模態識別結果影響如圖4所示[27]。
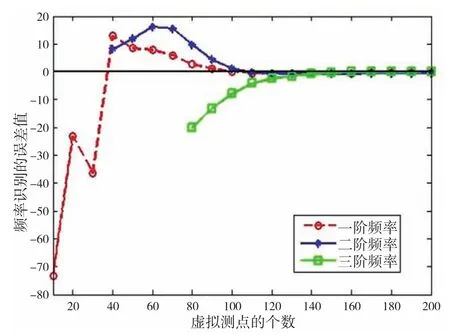
圖4 虛擬測點個數對系統模態識別結果影響
(4)最小二乘復指數法(LSCE)和多參考點復指數法(PRCE)
LSCE法[28]又稱Prony多項式法,與ITD法相比,LSCE法在識別模態頻率和阻尼比時只用一個測點的脈沖響應數據,因而LSCE法屬于局部識別法。LSCE法的基本思想是以Z變換因子表示脈沖響應,Z變換因子中包含待識別的復頻率,構造Prony多項式,使其零點等于Z變換因子的值,將求解Z變換因子就轉化為求解Prony多項式系數:
為求解Prony多項式系數,構造脈沖響應數據序列的自回歸模型,自回歸系數即Prony多項式系數,通過在不同起始點采樣,得到關于自回歸系數的線性方程組,用最小二乘法計算得到自回歸系數的解,可得Prony多項式的根。再由脈沖響應數據序列構造該測點各階脈沖響應幅值(留數)的線性方程組,用最小二乘法求解,對各測點作識別,便可得到各階模態矢量,脈沖響應序列的自回歸模型如下:

式中:為以l為起始采樣點的含2n個采樣值的時序樣本,為自回歸系數列陣,即Prony多項式的系數。
為克服LSCE法僅能應用于單輸出狀態的不足,在LSCE法的基礎上建立MIMO整體識別的PRCE法[29],其數學模型為基于MIMO的脈沖響應函數矩陣。
(5)協方差驅動的隨機子空間法
其基本思想是由輸出響應數據構建Hankel矩陣,計算協方差序列形成Toeplitz矩陣,Toeplitz矩陣主要作用是保持信號原有信息的情況下縮減數據量,然后對其作SVD得到系統矩陣,進而識別結構的模態參數。其同樣存在系統階次難以確定的問題,無論是根據非零奇異值點個數或是利用奇異值的跳躍都難以在實際工程中確定系統的階次,目前一般采用隨機子空間結合穩定圖的方法進行模態參數的識別[30],穩定圖是目前普遍認可的相對較好的確定系統階次的方法[31]。
(6)協方差驅動的隨機子空間法特征系統實現法(ERA)
特征系統實現算法是美國航天航空局的Langley研究部門于1984年提出的一種時域模態分析方法[32]。ERA法以由MIMO得到的脈沖響應函數為基本模型,利用結構的脈沖響應信號函數矩陣來構建廣義Hankel矩陣,對其進行SVD,從非零奇異值中提取得到系統的特征量,通過對系統矩陣進行特征值分解識別出系統的模態參數。因其在計算中利用了最小實現原理,大幅度減小矩陣維數和計算量,在實際工程中應用十分廣泛。
ERA法通常結合NExT法用來識別環境激勵(白噪聲激勵)下的系統模態參數,NExT-ERA法程序流程圖如下頁圖5所示。許俊臣和洪明[33]利用NExT-ERA法對一鋼質船體梁模型進行了模態參數識別,如圖6 -圖8[33]所示。
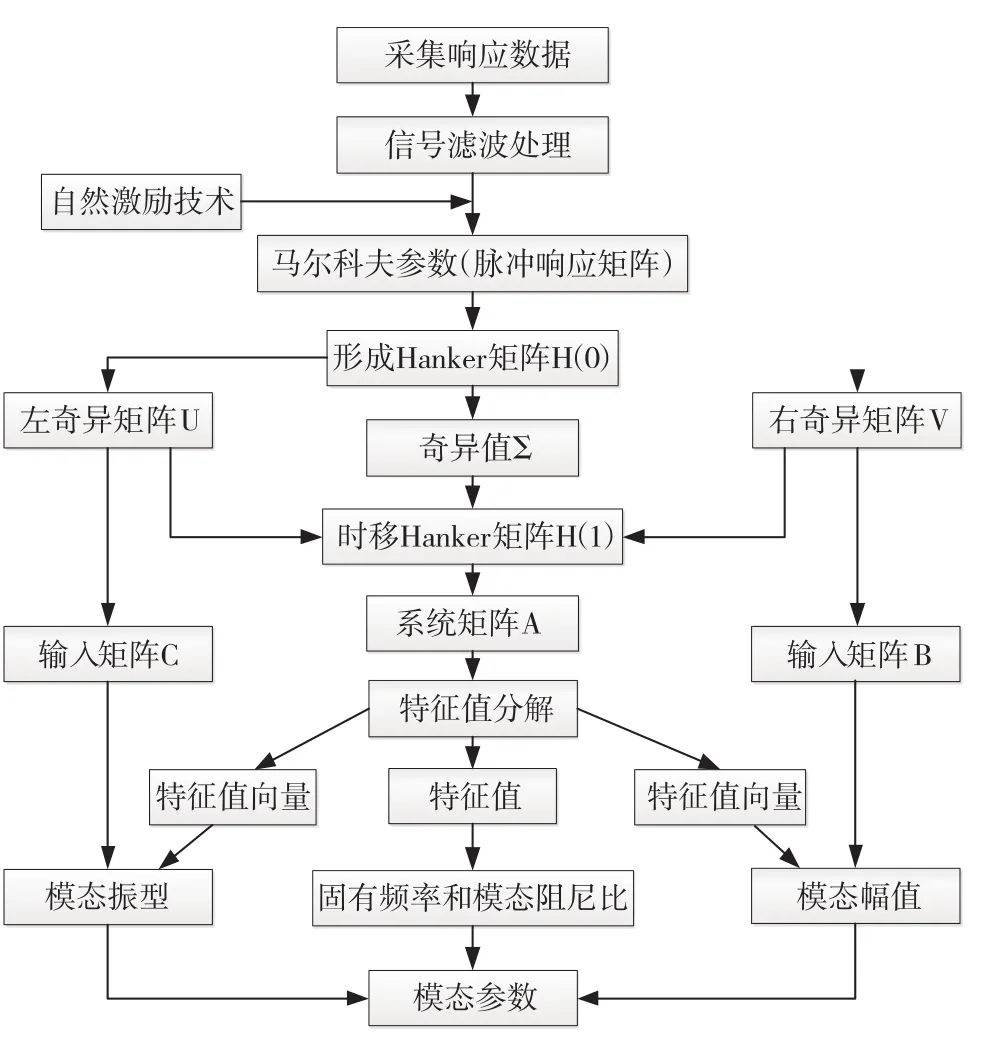
圖5 NExT-ERA法程序流程圖
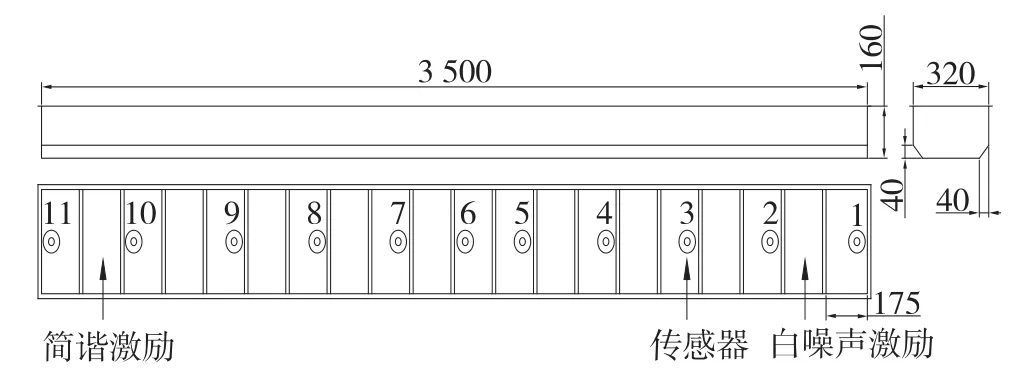
圖6 船模結構示意圖
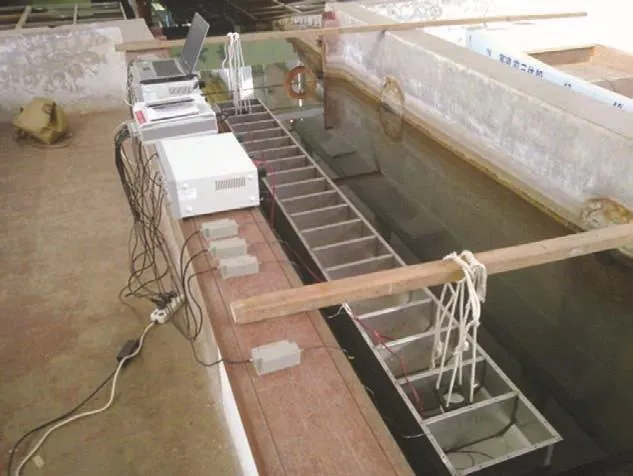
圖7 水池船模結構實驗圖
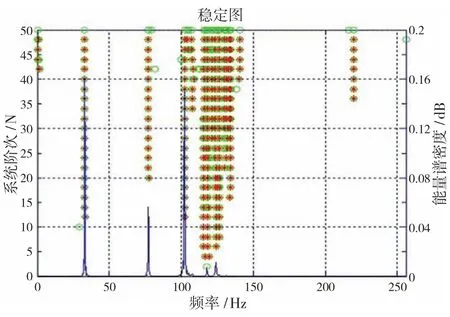
圖8 穩態白噪聲激勵下的系統穩定圖
研究中對存在單頻激勵時對應的簡諧頻率的影響,信噪比的影響以及在不同裝載情況下的船模模態參數進行大量的實驗對比和系統的分析研究。實驗結果顯示只要簡諧激勵的頻率與固有頻率沒有離得太近,其頻率和信噪比對模態分析的影響不大,當兩者頻率較為接近,可能會發生頻率混疊的現象;局部結構上附加質量的存在對局部模態振型和識別結果會造成一定影響;萬嶺和洪明等人[34]采用NExT-ERA法對簡支梁模型和船體模型分別進行模態參數識別,驗證了NExT-ERA法進行運行模態識別能夠得到良好效果。文章對ERA法中系統階次的確定進行深入討論,指出選擇較低階次容易丟失系統的模態信息,而選擇較高階次又會引入噪聲模態;楊和振、李華軍等人[35]采用NExT-ERA法對海洋環境載荷下海洋平臺結構模擬模型進行了參數識別,并將識別結果同峰值法進行比較,比較結果顯示NExT-ERA法更加適用于環境激勵下大型結構物的模態參數識別。
2.3 聯合時頻域法
2.3.1 小波變換法
小波變換是一種基于信號時間-尺度的分析方法[36],具有多分辨率分析的特點,即在低頻部分具有較高的頻率分辨率和較低的時間分辨率,在高頻部分具有較高的時間分辨率和較低的頻率分辨率,在時域和頻域都具有表征信號局部特征的能力,很適合探測正常信號中夾帶的瞬態反常現象,因此被廣泛地應用于對非平穩信號的分析和處理中[37]。
對于一個自由度為n的線性系統,其自由振動響應可以表示為:

對上式進行小波變換可以得到:

式中:a和b分別稱為小波變換的尺度參數與位移參數。
當尺度參數為ai時,在小波變換過程中,只有與ai相關的模態起主要貢獻,其余的模態可以忽略不計,則有:

由上式可以分別得到其幅值和相位值:
通過上式便可以識別出系統的模態參數。小波分析自身也存在一定的局限性,對具體信號依據何種原則來選擇小波基,目前在理論上和實際應用中尚沒有統一的方法,而且小波變換還可能由于其有限長度的特點出現能量泄露等問題,另外,小波變換的實質是一種線性變換,不能用于處理非線性問題。
朱宏平等[38]針對土木工程結構前幾階自振頻率處于低頻區域以及環境激勵下結構響應信號信噪比很低的特點,著重論述采用小波方法抑制原始測量信號中的高頻噪聲部分,從而突出結構低頻特性的基本原理,并用其對一實際高層結構進行模態參數識別,識別結果顯示基于小波變換的模態分析方法較傳統模態分析方法識別精度更高更有效。邵艷秋[39]采用RDT法獲得環境激勵下結構的自由響應,通過改進的Morlet小波時頻分析,分解多自由度系統為若干個單自由度系統的組合,根據小波系數和系統固有頻率和阻尼比間關系識別出環境激勵下結構模態參數,并應用GARTEUR模型驗證小波變換方法的有效性;李夕兵等[40]分別應用小波變換和HHT變換對實測爆破震動信號進行時頻分析,發現HHT較小波變換避免了選擇小波基的困難,在分析非平穩信號時更具適應性,而且小波譜由于受小波基有限長度及測不準原理的限制,容易造成頻譜擴散和能量泄露的問題。
2.3.2 Hilbert-Huang變換法
HHT作為一種針對非線性系統非平穩信號的自適應時頻處理方法,由Huang等人于1998年首次提出[41]。HHT主要由經驗模態分解(EMD)和希爾伯特變換(HT)組成。經驗模態分解是處理時域信號的方法,可將初始信號分解成一系列本征模態函數(IMF)和殘余項的疊加,實現對原信號的強制平穩化處理,其中分解得到的IMF分量能夠表征信號在某一特征尺度上的振動模態;然后根據Hilbert變換,可以完成瞬時模態參數的求解(主要指瞬時頻率),其算法流程如圖9所示。
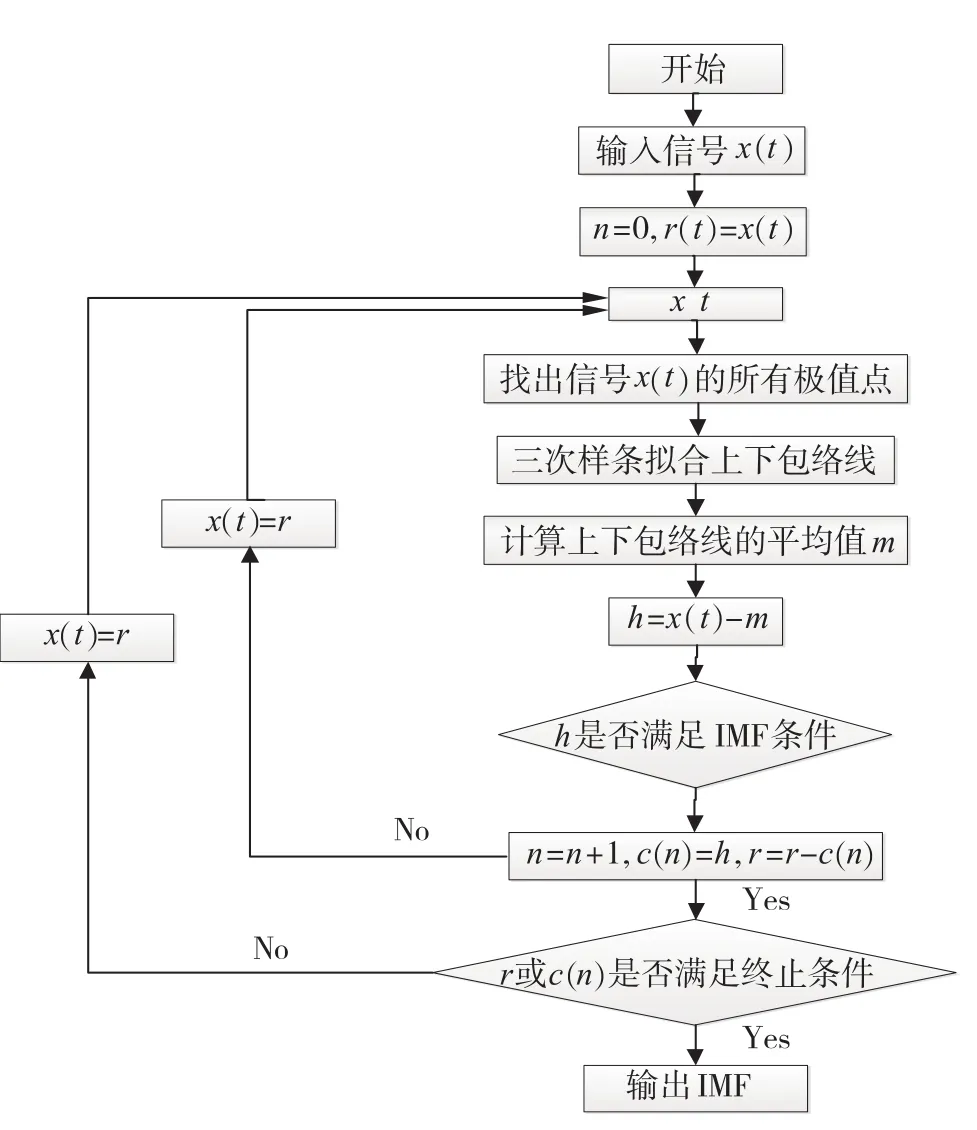
圖9 HHT算法流程圖
相對于傳統的時域模態參數識別方法,HHT將參數識別擴展到時頻域范圍,打破了傳統方法基于傅里葉變換只能在頻域或時域描述信號的缺陷,提出了瞬時頻率的概念,能夠用來解決非穩態環境下的模態參數問題;相對于小波變換方法,Hilbert譜在時頻域的分辨率都要高于小波譜,具有更強的局部特性,而且能夠反映系統的非線性特性。但是對基于HHT的模態識別方法的研究也存在很多不足,其理論推導并不完善,對特定信號容易出現端點效應,尤其對于模態頻率較為接近的結構容易發生模態混淆的現象。
姚熊亮和張阿漫[42]基于EMD對水下爆炸結構沖擊信號進行分析,通過研究每一個本征模態函數,從本質上分析了水下爆炸沖擊加速度信號的組成成分及特點;陳雋和徐幼麟[43]結合青馬橋的實測動力響應,研究了HHT方法在結構模態參數識別中的應用,并將其分別用于平穩和非平穩的實測記錄以識別結構的模態信息,驗證了HHT相對傳統模態識別方法在處理非平穩性數據方面具有明顯優勢;湯寶平和何啟源等人[44]為克服噪聲信號對EMD分解的影響,提出基于小波去噪和HHT相結合的模態參數識別方法,該方法先利用小波進行信號去噪,以減少EMD分解過程的計算量和分解層數,然后利用HHT進行模態參數的識別,簡支梁系統實驗證明該算法對阻尼的識別精度明顯提高;韓建平和李達文[45]針對傳統模態識別方法對非線性和非穩態信號處理能力差,且對阻尼比識別精度較低的現象,采用基于NExT和HHT相結合運行模態參數識別方法,通過對一個12層鋼筋混凝土框架模型進行模態分析,驗證了這種算法對阻尼比的識別效果較傳統基于傅里葉變換的半功率帶寬法有所改進,但對識別精確性仍難以確認;劉曉冰[46]采用基于NExT和HHT相結合運行模態參數識別方法,對船模結構進行了模態識別研究,驗證了該方法有效避免NExTERA法中的虛假模態和系統定階問題,適用于船舶結構參數識別及狀態監測。
3 環境激勵下模態參數識別研究熱點
3.1 復雜密頻結構的模態參數識別
傳統的模態參數識別方法,普遍要求被測結構的各階模態頻率較分散,阻尼比較小,即模態混疊不嚴重,但是對于工程中的大型復雜結構,特別是具有質量或剛度突變的結構,普遍含有密集模態,難以通過激振使結構按某一階固有振型振動。產生密集模態的原因有兩個:一是各階模態的固有頻率過于靠近;二是模態阻尼比較大。如果兩個模態的固有頻率很接近,且各自的阻尼比也較大,則在頻譜上會出現如圖10[49]所示的模態混疊現象,無法用普通的傅里葉帶通濾波來實現對多模態的分離,進而影響多模態參數識別的精度。
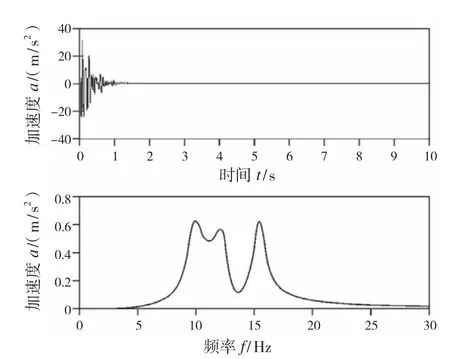
圖10 模態混疊示意圖
傳統的基于傅里葉變換的模態識別方法不能直接用來識別復雜密頻結構,因此時頻分析方法被更為廣泛地應用于密集模態結構的模態識別。陳雋等[47]采用HHT法對密頻結構的阻尼進行識別,對兩個自由度的密頻和非密頻結構分別采用HHT法和半功率帶寬法進行參數識別,結果表明HHT法對密頻結構模態識別的識別精度明顯優于半功率帶寬法,但是HHT法對密頻結構的識別精度隨頻率密集度的提高而明顯降低,為解決密頻結構的模態混疊問題,作者選擇采用在EMD分解過程中引用一種稱為間歇檢測準則的方法來消除混合現象;劉俊斐和李華軍[48]結合海洋平臺物理模型的動力響應數據,采用加入偽信號技術的HHT方法對模態密集結構進行模態分析,并對加入偽信號的幅值和頻率選擇進行改進,進而使用峰值法和HHT法結合偽信號技術對力錘激勵下的海洋平臺物理模型進行模態參數識別,得到結構的自振頻率和阻尼比;黃應來和董大偉等人[49]提出了一種針對密集模態結構模態參數識別的方法,其基本思想是先用EMD分解化多模態參數識別問題為單模態參數識別問題,考慮到適當減小各階模態的阻尼比可以相應降低各階模態間的混疊程度,采用加逆衰減指數窗與帶通濾波相結合的方法,將各個模態近似提取出來,再使用先進的時頻分析方法識別系統模態參數。圖11[49]和圖12[49]分別為密集模態結構加速度響應信號加逆衰減指數窗前后的時域圖和頻譜圖。
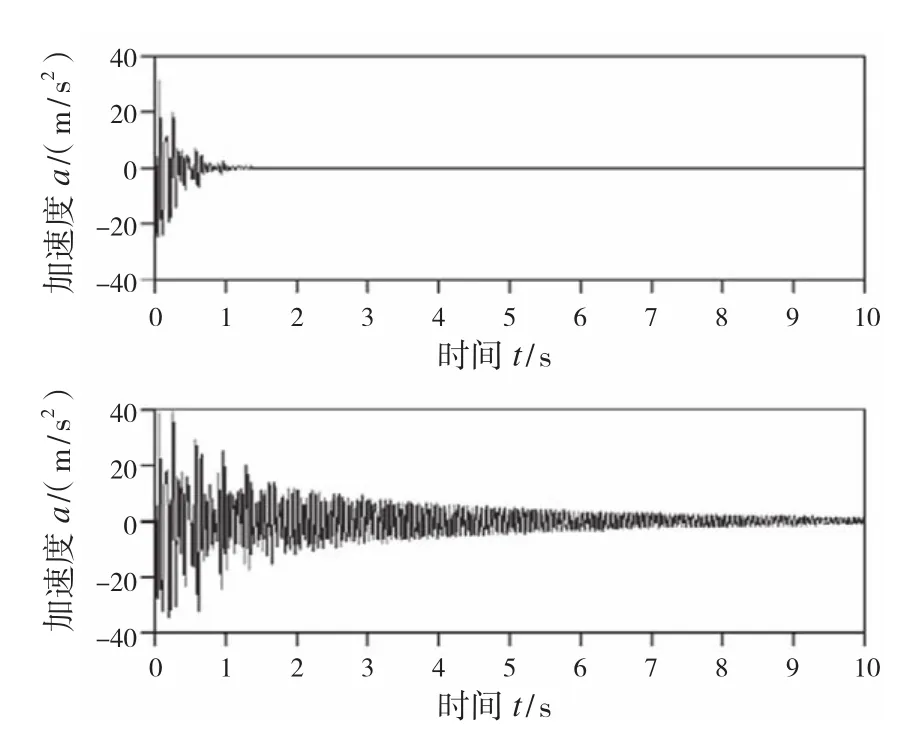
圖11 加逆衰減指數窗前后時域圖
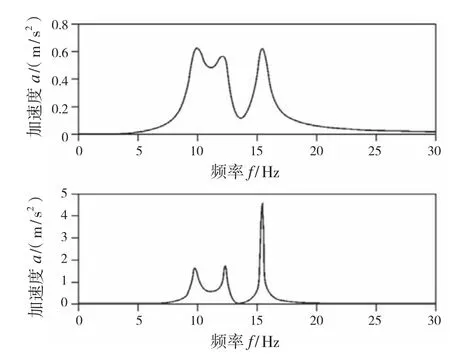
圖12 加逆衰減指數窗前后時域圖
可以看出,通過加入適當的逆衰減指數窗,可以有效降低模態密集度,利用帶通濾波器就可以將多模態信號中的各階模態分離出來,然后利用Hilbert變換等方法識別系統的模態參數;曹軍宏和莊飚等人[50]提出采用基于時延優化的二階盲辨識算法對模態密集結構進行參數識別,其基本思想是利用量子遺傳算法對二階盲辨識算法中時延的選擇進行優化,并對觀測信號的最優時延二階協方差矩陣作對角化處理,同時得到模態振型和單自由度信號,然后基于FFT法提取出對應各階模態的模態頻率和阻尼比;孫鵬和丁幼亮等人[51]從小波變換公式推導的角度對結構模態混疊的機理進行研究分析,明確密集模態的定義并給出結構模態密集度指標,即相鄰模態的頻率比,研究表明當相鄰模態的頻率比一定時,隨著阻尼比以及相鄰模態阻尼比差值的增加,模態混疊現象會愈加嚴重。
3.2 非穩態環境激勵下的模態參數識別
頻域法和時域法中假設環境激勵需要近似表示為平穩白噪聲激勵,這是因為頻域法和時域法都建立在傅里葉變換的基礎上,而傅里葉變換的全局特性限制其不能夠用來分析非平穩信號。對于船舶等大型水上結構,通常將環境激勵特征歸納為平穩的強線譜與弱隨機譜的疊加,這也是對船舶環境激勵的一種簡化或者近似,真實的環境激勵應當多為非穩態的信號。常軍等[52]對隨機子空間法產生虛假模態和模態遺漏現象的原因進行深入分析,發現產生虛假模態的主要原因是由于輸入信號不滿足白噪聲假設,并由此提出分段平穩隨機信號參數識別方法;李愛群等[53]在潤揚大橋的健康監測中發現在風荷載及車輛荷載下大橋的動力響應在一定的時間尺度內是非平穩的,不滿足傳統模態參數識別方法的白噪聲假設,因此以HHT和小波變換為代表的聯合時頻域法成為分析非穩態環境激勵下模態參數識別的主要手段。
李中付和華宏星[54]認為任意隨機激勵信號都可以表示成白噪聲和非白噪聲信號的疊加,其一般形式寫作:

由此,我們可推導出線性系統響應之間的相關函數由兩部分組成,一部分與脈沖響應具有相同的數學形式,另一部分為其他形式;然后基于EMD分解,把非穩態環境激勵下多自由度線性系統的模態參數辨識問題轉化為類似于已知各個單自由度系統的脈沖響應進行參數辨識問題。這種算法主要有兩個優點:一是無論白噪聲激勵、穩態隨機激勵還是非穩態隨機激勵,都可以僅根據結構的響應識別出線性結構的模態參數;二是能夠有效地識別出環境激勵中的周期成分。
Chiang和Lin[55]假設外部激勵是由平穩白噪聲信號和一個調幅信號乘積組成新的非平穩隨機信號,他證明在這種假設條件下測得的響應歷程的均方根函數中包含了激勵信號中的調幅成分,并可以通過曲線擬合將調幅信號提取出來,這樣就可以將非平穩信號轉變為平穩信號,然后計算不同測點間響應信號的互相關函數,得到的信號便是一個可以進行模態識別的自由衰減信號。作者使用ITD法對其進行模態識別,并用一個六自由度的鏈式結構進行數值實驗對該方法進行驗證。向律楷[56]在文章中將環境激勵由白噪聲擴展到MA(q)階模型,假設非平穩激勵由d-1階多項式趨勢項與MA(q)階模型之和構成,并使用NExT-ERA法識別出系統的模態參數。杜秀麗和汪鳳泉[57]將環境激勵視作均勻調制的萊維隨機激勵,并基于連續時間AR模型提出時域模態分解方法,數值實驗證明該算法能夠精確識別滿足這種激勵模型下的系統模態參數。
本文基于EMD分解,對非穩態環境激勵下的三自由度系統進行模態參數識別,具體參數如式(13)-式(15)所示:
式中:m為模型質量,kg;k為剛度,N/m;c為阻尼,N·s / m。
分別對2號質點施加四種不同形式的激勵:平穩白噪聲信號、平穩白噪聲加簡諧信號、平穩白噪聲加線性調頻信號(頻率從0到30 Hz隨時間線性增加)以及平穩白噪聲和調幅信號(e-0.1t)的乘積,采樣頻率為500 Hz,采樣時間為30 s,用Newmark法求得三個質點的加速度響應,分別對任意兩點做互相關,然后對得到的互相關函數進行EMD分解,并用Hilbert變換得到該三自由度結構在四種不同激勵下的模態參數,識別結果如下頁表1所示。由識別結果所示,說明該算法不僅能夠識別穩態環境激勵下的系統模態參數,且可正確識別出各種不同形式非穩態環境激勵下的系統模態參數。
3.3 時變系統的模態參數識別
目前針對船舶結構的模態參數識別主要是將其視作線性時不變系統來進行識別,但視作線性時變系統更合理,這時傳統的運行模態分析方法便不再適用。然而目前對線性時變結構的模態識別研究,也多是將線性時不變結構參數識別理論基于“凍結時間”思想的直接推廣,即假設每一時刻的時間被瞬間“凍結”,這樣結構就變為時不變結構,然后按時不變結構參數識別理論識別出每一時刻的模態參數,再用曲線擬合得到隨時間變化的模態參數[58]。李雷[59]提出一種基于“短時時不變假設”結合工況模態分析的識別方法,對飛行器舵片模型進行模態辨識,分析得到舵片模型在受熱情況下動力學參數的時變規律。但是這種做法忽略了結構參數隨時間變化給結構動力特性帶來的影響,造成某些情況下的分析結果不符合實際,因此這種模態參數一般被稱為“偽模態參數”[7]。

表1 四種不同工況下模態參數識別結果
為了準確描述時變系統模態參數隨時間變化的特性,以HHT和小波變換為代表的聯合時頻域法被更多地應用到時變系統的模態參數識別過程中。劉建軍[60]提出基于HHT由線性時變SDOF結構的自由振動響應識別結果模態參數的新方法,并將其擴展到了MDOF結構及強迫振動條件下結構的模態識別,并用可調附加質量的懸臂梁實驗驗證HHT用于識別時變系統模態參數的有效性;宋斌華[61]在劉建軍工作基礎上研究HHT和LMD[62]兩種新的時頻分析方法在時變結構模態參數識別中的應用;沈林[63]基于Daubechies小波對線性時變系統進行物理參數識別,并對線性時變系統在參數連續平滑變化、周期變化和突變的工況下進行仿真算例研究,驗證了Daubechies小波能夠正確有效地識別時變系統的物理參數。
我們基于HHT變換對一剛度和阻尼隨時間連續變化的兩自由度線性時變系統進行數值模型研究,采樣頻率為500 Hz,采樣時間為3 s,該數值模型的具體參數分別取為:
式中:m為模型質量,kg;c為阻尼,N·s / m;k為剛度,N/m 。
將算例中的質點m1在t = 0時刻拉離平衡位置2mm,另一個質點保持不動,然后從靜止自由釋放,計算質點m1的加速度響應,對其作EMD分解,并對包含系統單階模態的瞬態響應分量作Hilbert變換,識別出系統的模態瞬時頻率和阻尼比,識別結果如圖13、圖14所示。
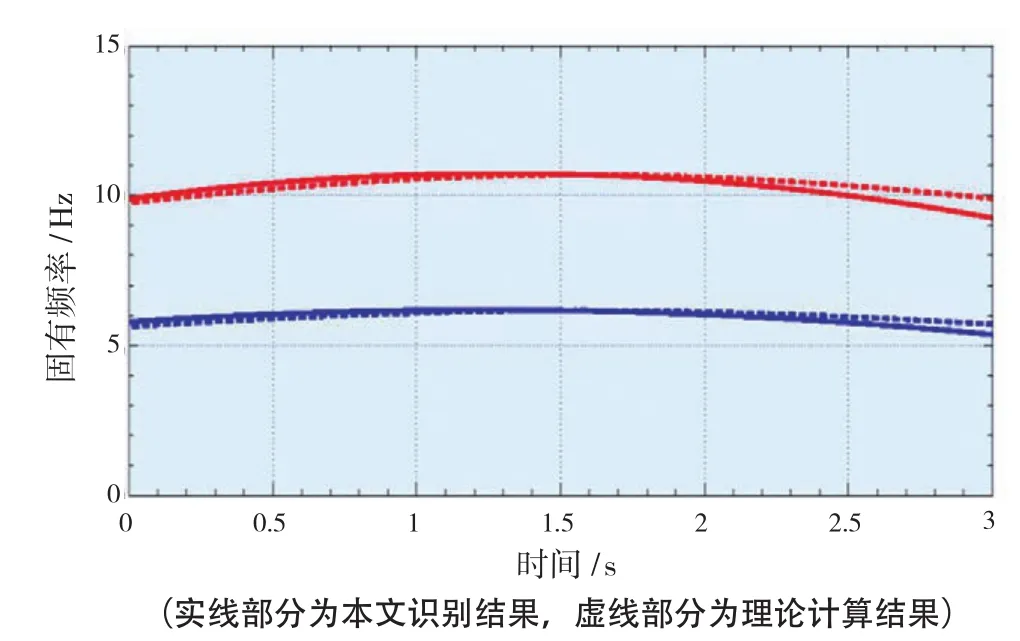
圖13 模態瞬時頻率識別結果
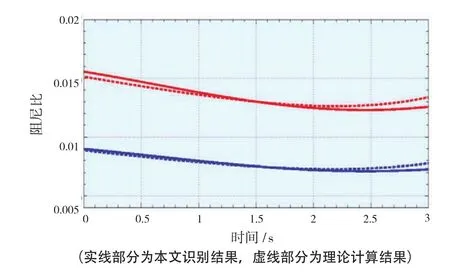
圖14 模態阻尼比識別結果
在前面兩自由度時變系統數值實驗的基礎上,本文對一移動質量-懸臂梁耦合時變系統進行實驗研究,實驗模型如圖15所示。

圖15 移動質量-懸臂梁耦合系統實驗模型
將基于HHT變換的識別結果同傳統的特征系統實現法識別結果及有限元分析結果進行研究對比,驗證了HHT變換不但可以識別出線性時不變結構的模態信息,而且能夠準確地識別得到時變結構的模態參數,識別結果如圖16、圖17所示。
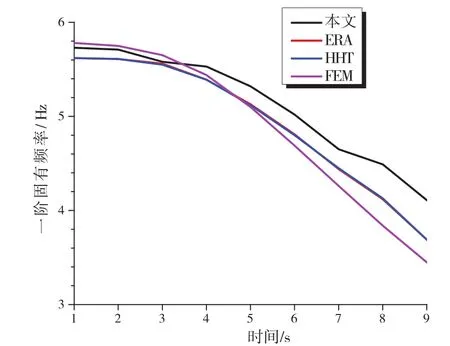
圖16 一階模態頻率識別結果
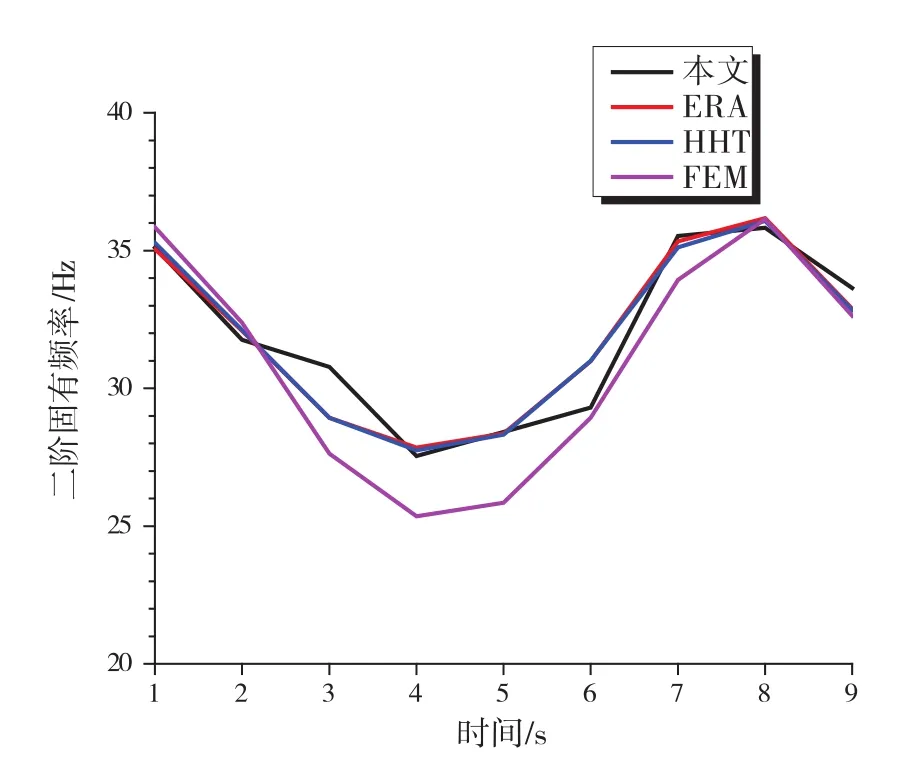
圖17 二階模態頻率識別結果
3.4 非線性系統的模態參數識別
非線性模態參數的概念最早由Rosenberg提出,他將模態分析思想擴展至非線性系統領域,Rosenberg給出描述非線性系統模態的頻響函數模型,并基于系統的響應數據通過曲線擬合的方法識別出系統的非線性模態參數[64],其典型特征有兩個:一是非線性系統激勵與響應之間的關系無法事先確定,必須選擇正確的動力學模型對非線性系統進行描述;二是非線性系統的固有頻率及阻尼比等模態參數都是時間的函數,因此能夠用來刻畫系統模態參數隨時間變化規律的聯合時頻域法成為分析非線性系統模態參數的最主要手段。張也弛[65]綜合HHT和CxA方法,對強非線性系統進行了模態參數識別,同時指出這種算法能夠準確對非線性系統進行模態識別的前提是動力學模型能夠真實描述原物理過程;劉衛華等[66]建立了含非線性參數單自由度振動系統的力學模型,如圖18所示,系統運動微分方程可寫成:
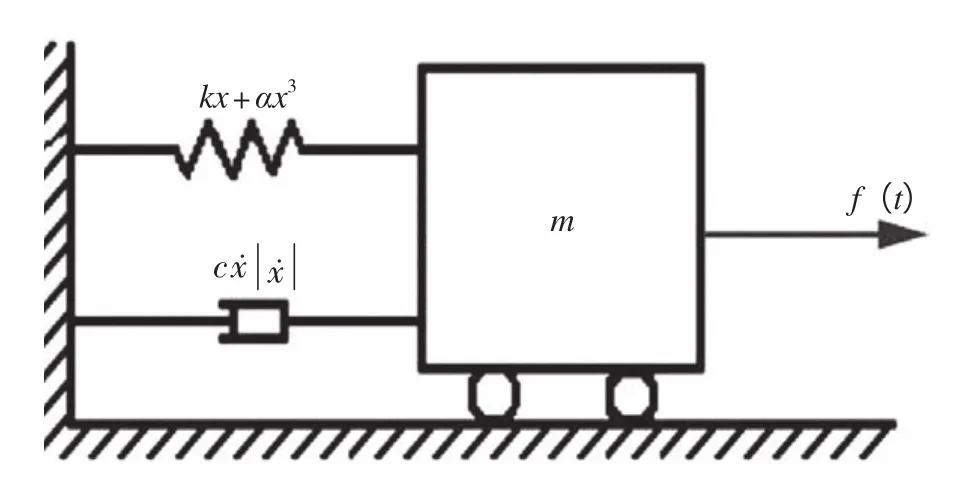
圖18 非線性單自由度系統力學模型

式中:α為弱非線性系數。
研究將已知非線性系統產生的混沌響應作為系統激勵,并假定該響應由若干個不穩定周期軌道組成,從混沌響應的狀態空間中提取出近似周期軌道,并采用諧波平衡法識別出非線性系統的模態參數;針對目前非線性系統模態參數識別的研究主要停留在穩態環境激勵下進行,王鳳利和趙德有[67]提出非穩態環境激勵下基于局域波法的非線性系統模態參數識別方法,算法思想是通過局域波分解得到等效線性系統,并通過Hilbert變換識別出轉子系統的模態參數。盡管已有很多學者開始致力于研究非線性系統的模態參數識別方法,但對非線性系統的模態分析還遠沒有達到線性模態理論研究那樣深入和透徹。
4 結 論
本文對環境激勵下的模態參數識別方法進行了歸納分類,重點分析這些經典模態識別算法的理論思想和適用條件。主要對目前國內研究熱點問題進行了綜述,并從數值算例和實驗的角度對這些問題進行了分析,為研究和應用提供參考。通過上面對國內相關文獻進行分類總結,本文關于環境激勵下模態參數識別的研究現狀有如下結論:
(1)對于環境激勵,目前普遍需要將激勵信號視作白噪聲或適當寬松地視為平穩信號,即使在部分分析非穩態環境激勵的文獻中也是將非穩態環境激勵近似看成一種固定的表達形式,但是,在實際工程應用中存在的激勵信號是任意形式的非平穩信號,如何正確地給出環境激勵的近似表達形式尚待研究。
(2)如何從實驗模態中有效地甄別和提取噪聲模態,尤其對于運行狀態下的船舶結構,環境激勵包括近似白噪聲激勵、有害噪聲以及船上螺旋槳主機引起的單頻簡諧激勵等,如何考慮這些簡諧激勵和噪聲模態給船舶結構模態分析帶來的影響?也是目前可以研究的一個新方向。
(3)不同于實驗模態分析,環境激勵下的運行模態分析很可能會出現激勵不夠充分的現象,從導致部分階次的模態難以識別,因此在實驗過程中如何對結構物正確施加激勵?也是工程實際中需要考慮的問題。
(4)目前對環境激勵下的結構模態參數識別尚沒有一種統一完備的方法,各種方法都在一定程度存在缺陷,頻域法和時域法不能夠用來分析非平穩信號,且存在由噪聲引起的虛假模態問題,小波分析不能解決非線性問題且存在分辨率無法保證和能量泄露等問題,而HHT法中針對瞬時頻率的數學定義在信號處理領域尚未達成共識,IMF分量之間的正交性也沒有完整的數學證明,且存在虛假模態和端點效應等問題。
(5)模態識別過程中對系統階次確定是十分關鍵和棘手的問題,盡管已經有學者提出采用模態置信度及穩定圖法來確定系統階次,但噪聲模態的影響仍不能做到完全消除,識別精度還有待改善。
(6)目前對系統固有頻率已能準確識別,但是對結構阻尼的識別效果往往不好,仍是亟待解決的問題。
[1] 曹樹謙,張文德,蕭龍翔.振動結構模態分析[M].天津:天津大學出版社,2001.
[2] 萬嶺.環境激勵下的船舶結構模態參數識別[D].大連:大連理工大學,2010.
[3] 姜大正.環境激勵下船舶結構模態分析實驗與理論研究[D].大連:大連理工大學,2009.
[4] 許俊臣.船舶加筋結構的運行模態分析及動力減振優化[D].大連:大連理工大學,2013.
[5] 續秀忠,華宏星,陳兆能.基于環境激勵的模態參數辨識方法綜述[J].振動與沖擊,2002(3):1-5.
[6] 劉宇飛,辛克貴,樊健生,等.環境激勵下結構模態參數識別方法綜述[J].工程力學,2014(4):1-5.
[7] 王學敏.基于Hilbert-Huang變換的橋梁監測信號分析與處理和時變模態參數識別[D].長沙:中南大學,2008.
[8] Roeck G De,Peeters B,Ren W X. Benchmark Study on System Identification through Ambient Vibration Measurements[C]. Proceedings of the 18th International Modal Analysis Conference(IMAC),2000:1106-1112.
[9] 張毅剛,劉才瑋,吳金志,等.適用空間網格結構模態識別的改進功率譜峰值法[J].振動與沖擊,2013(9):10-15.
[10] 夏祥麟.環境激勵模態分析方法的比較[D].長沙:中南大學,2013.
[11] Brincker R,Zhang Ling-mi,Andersen P. Modal Identification from Ambient Responses Using Frequency Domain Decomposition[C]. Proceedings of the 18th International Modal Analysis Conference(IMAC),2000:625-630.
[12] Akaike H. Power Spectrum Estimation Through Autoregressive Model Fitting[J]. Annals of the Institute of Statistical Mathematics,1969,21:407.
[13] 郭永剛,許亮華,水小平.基于脈沖響應數據的ARMA法建模以及模態參數識別[J].地震工程與工程振動,2006(5):167-171.
[14] Smail M,Thomas M,Lakis A A.Assessment of Optimal ARMA Model Orders for Modal Analysis[J].Mechanical Systems and Signal Processing,1999(5):803-819.
[15] Van Overschee P,De Moor B. Subspace Algorithms for the Stochastic Identification Problem[C]. Proceedings of the 30th IEEE Conference on Decision and Control,1991,1321-1326.
[16] 辛峻峰,王樹青,劉福順.數據驅動與協方差驅動隨機子空間法差異化分析[J].振動與沖擊,2013(9):1-5.
[17] 辛峻峰,盛進路,張永波.數據驅動隨機子空間法矩陣維數選擇與噪聲問題研究[J].振動與沖擊,2013(16):152-157.
[18] 常軍,張啟偉,孫利民.隨機子空間產生虛假模態及模態遺漏的原因分析[J].工程力學,2007(11):57-62.
[19] 章國穩,湯寶平,孟利波.基于特征值分解的隨機子空間算法研究[J].振動與沖擊,2012(7):74-78.
[20] Cole H A. On-Line Failure Detection and Damping Measurement of Aerospace Structures by the Random Decrement Signatures[J].1973,NASACR-2205.
[21] Ibrahim S R. Efficient Random Decrement Computation for Identification of Ambient Responses[C].Proceedings of the 19th IMAC,Florida,USA,2001:1-6.
[22] James G H,Came T G,Edmunds R S. STARS Missile-Modal Analysis of First-Flight Data Using the Natural Excitation Technique[C]. Proceedings of the 12th International Modal Analysis Conference(IMAC),1994.
[23] 羅奎.基于自然激勵技術的結構模態參數識別應用研究[D].武漢:武漢理工大學,2010.
[24] 紀曉東,錢稼茹,徐龍河.模擬環境激勵下結構模態參數識別試驗研究[J].清華大學學報,2006(6):769-772.
[25] Ibrahim S R,Mikulcik E. A Method for the Direct Identification of Vibration Parameters from the Free Response[J].The Shock and Vibraton Bulletin,1977(4):183-198.
[26] 楊佑發,李帥,李海龍.環境激勵下結構模態參數識別的改進ITD法[J].振動與沖擊,2014(1):194-199.
[27] 周凱.虛擬測點對ITD法識別結果的影響[J].中國水運,2009(2):184-186.
[28] Brown D L,Allemang R J,Zimmerman R,et al. Parameter Estimation Techniques for Modal Analysis[J]. SAE Paper,No.790221,SAE Trans.,1979(1):828-846.
[29] Vold H,Rocklin G T. The Numerical Implementation of a Multi-input Modal Estimation Method for Minicomputers[C]. Orlando,FL,USA:Proceedings of the 1st International Modal Analysis Conference(IMAC),1982:542-548.
[30] 常軍,張啟偉,孫利民.穩定圖方法在隨機子空間識別模態參數中的應用[J].工程力學,2007(2):39-44.
[31] Ibrahim S R. Computation of Normal Modes from Identified Complex Modes[J].AIAAJOURNAL,1982(3):446-451.
[32] Juang J N,Pappa R S.An Eigensystem Realization Algorithm(ERA)for Modal Parameter Identification and Model Reduction[J].NASA/JPL,1984(5):620-627.
[33] Xu Junchen,Hong Ming,Liu Xiaobing. Operational Modal Analysis of a Ship Model in the Presence of Harmonic Excitation[J]. J. Marine Sci. Appl.,2013(1):38-44.
[34] 萬嶺,洪明,許俊臣.基于NExT/ERA方法緩解激勵下的船體結構模型總體模態參數識別[J].船舶力學,2013(7):774-784.
[35] 楊和振,李華軍,黃維平.海洋平臺結構環境激勵的實驗模態分析[J].振動與沖擊,2005(2):129-132.
[36] Grossmann A,Morlet J. Decomposition of Hardy Function into Square Integrable Wavelet of Constant Shape[J]. SIAM J. of Math,Anal,1984(4):723-736.
[37] 譚冬梅,姚三,瞿偉廉.振動模態的參數識別綜述[J].華中科技大學學報,2002(3):73-78.
[38] 朱宏平,翁順.運用小波分析方法進行結構模態參數識別[J].振動與沖擊,2007(4):1-5.
[39] 邵艷秋.環境激勵下系統模態參數識別方法研究[D].南京:南京航空航天大學,2008.
[40] 李夕兵,張義平,劉志祥,等.爆破震動信號的小波分析與HHT變換[J].爆炸與沖擊,2005(6):528-534.
[41] Huang N E,Zheng S,Steven R L. The empirical mode decomposition and the Hilbert spectrum for nonlinear random-stationary time series analysis[C].Proc R Soc London Ser A,1998,454:903-95.
[42] 姚熊亮,張阿漫.經驗模態分解方法在結構沖擊信號分析中的應用[J].中國艦船研究,2006(4):11-15.
[43] 陳雋,徐幼麟. HHT方法在結構模態參數識別中的應用[J].振動工程學報,2003(3):383-388.
[44] 湯寶平,何啟源,蔣恒恒,等.利用小波去噪和HHT的模態參數識別[J].振動、測試與診斷,2009(2):197-200.
[45] 韓建平,李達文.基于Hilbert-Huang變換和自然激勵技術的模態參數識別[J].工程力學,2010(8):54-59.
[46] 劉曉冰.基于HHT方法船舶結構運行模態參數識別[D].大連:大連理工大學,2014.
[47] 陳雋,徐幼麟,李杰. Hilbert-Huang變換在密頻結構阻尼識別中的應用[J].地震工程與工程振動,2003(4):34-42.
[48] 劉俊斐,李華軍.HHT方法在模態密集結構模態參數識別中的應用研究[J].中國海洋大學學報(自然科學版),2007(S2):181-188.
[49] 黃應來,董大偉,閆兵.密集模態分離及其參數識別方法研究[J].機械強度,2009(1):8-13.
[50] 曹軍宏,莊飚,韋灼彬.時延優化二階盲辨識應用于密集模態結構參數識別[C].第22屆全國結構工程學術會議論文集(第1冊),2013.
[51] 孫鵬,丁幼亮,張勁泉,等.基于Morlet小波變換的結構密集模態參數識別[J].東南大學學報,2012(2):339-345.
[52] 常軍,孫利民,張啟偉.一種分段平穩隨機信號的參數識別方法[J].振動與沖擊,2007(6):17-20.
[53] 李愛群,丁幼亮,費慶國,等.潤揚大橋斜拉橋模態頻率識別的環境變異性[J].東南大學學報,2007(2):245-250.
[54] 李中付,華宏星,宋漢文,等.非穩態環境激勵下線性結構的模態參數辨識[J].振動工程學報,2002(2):139-143.
[55] Chiang D Y,Lin C S. Identification of Modal Parameters from Nonstationary Ambient Vibration Data Using Correlation Technique[J]. AIAA Journal,2008(11):2752-2759.
[56] 向律楷.非平穩環境激勵下大橋結構的模態參數識別[D].北京:清華大學,2009.
[57] 杜秀麗,汪鳳泉.非平穩環境激勵下模態參數識別的連續時間AR方法[J].中國科學,2009(10):1736-1742.
[58] 于開平,鄒經湘,龐世偉.結構系統模態參數識別方法研究進展[J].世界科技研究與發展,2005(6):22-30.
[59] 李雷.工況模態分析在時變航天器結構中的應用[D].上海:復旦大學,2011.
[60] 劉建軍. Hilbert-Huang變換及其在線性時變結構模態參數識別中的應用[D].長沙:中南大學,2007.
[61] 宋斌華.基于Hilbert-Huang變換和局部均值分解的時變結構模態參數識別[D].長沙:中南大學,2009.
[62] 程軍圣,張亢,楊宇,等.局部均值分解與經驗模式分解的對比研究[J].振動與沖擊,2009(5):13-16.
[63] 沈林.基于小波方法的線性時變系統參數識別[D].南京:南京航空航天大學,2006.
[64] Rosenberg R M. Normal Mode in Nonlinear Dual Mode Systems[J]. J Appl Mech,1960,27:263-268.
[65] 張也弛.基于Hilbert-Huang變換的非線性系統參數辨識[D].哈爾濱:哈爾濱工業大學,2008.
[66] 劉衛華,丁旺才,田海勇.混沌激勵下振動系統的非線性參數識別[J].振動與沖擊,2009(5):80-83.
[67] 王鳳利,趙德有.基于局域波法的非線性系統模態參數識別研究[J].大連理工大學學報,2011(1):56-60.
Review of modal identifi cation of ship structure based on ambient excitation
HONG Ming LEI Chuan CUI Hong-yu
(School of Naval Architecture, Dalian University of Technology, Dalian 116024, China)
Based on the theory of modal analysis, this paper summarizes the modal identifi cation methods under ambient excitation, and discusses fundamental concepts and the advantages and disadvantages of these methods. It especially introduces the modal parameter identifi cation of ship structure under the ship sailing condition and hot issues about its domestic researches, which provide benefi cial references for the relevant researchers.
ambient excitation; modal parameters identifi cation; ship structure; operational modal analysis
U661.4
A
1001-9855(2014)05-0001-16
國家自然基金資助“基于運行模態識別的艦船加筋結構動力優化方法及實驗研究(51079027)”。
2014-08-18
洪 明(1959-),男,教授,研究方向:結構失效、振動和噪聲機理、預報及控制研究。
雷 川(1990-),男,碩士,研究方向:結構分析及模態參數識別。
崔洪宇(1977-),男,講師,研究方向:結構振動控制及故障診斷。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44