3 000噸級海上巡視船耐波性分析
2014-07-18 11:35:02巍蔣如宏黃嬡翔
船舶 2014年5期
劉 巍蔣如宏黃嬡翔
(1.上海交通大學 上海200030 ;2.中國船舶及海洋工程設計研究院 上海 200011)
3 000噸級海上巡視船耐波性分析
劉 巍1,2蔣如宏1黃嬡翔2
(1.上海交通大學 上海200030 ;2.中國船舶及海洋工程設計研究院 上海 200011)
以3 000噸級巡視船為研究對象,運用三維水動力理論對其耐波性能進行了數值計算。文中除了給出零航速時船體垂蕩、橫搖、縱搖與參考點垂向運動的傳遞函數(RAO),還進一步進行短期預報,給出航速為0 kn、13 kn、15 kn與18 kn時船體橫搖、垂蕩、縱搖與參考點垂向加速度的有義值,并與模型試驗結果進行對比分析。結果表明:水動力預報值與模型實驗值的趨勢基本一致。
耐波性能;巡視船;水動力分析;模型試驗
引 言
海上巡視船可在海上連續巡航、全天候執法,具備正當防衛能力和航速較高的技術特點,從執行任務的性質和可配備武器的特點看,應歸屬為準軍用船型。
我國海上巡視船的巡航范圍主要包括黃海、渤海、東海和南海等海域。這些海域全年出現惡劣海況的概率較高,這對執行任務的巡視船的耐波性提出了較高要求。如果船舶的耐波性不佳,輕則影響巡航任務的順利執行,重則會影響船舶的航行安全,因此該類船舶的耐波性能設計尤為重要。
1 基本計算原理
1.1 水動力分析
本文水動力分析將采用法國船級社開發的HydroSTAR軟件[1-3],它基于三維繞輻射勢流理論的計算程序,并綜合考慮一階和二階問題。在數值分析中,一階問題采用基于Kelvin源勢法,二階問題采用Molin法。流場的求解則基于頻域方法進行。
規則波的定義為:

參考點取重心處時,上式可表達為:

船體在波浪作用下的運動響應可以表達為:

1.2 譜分析
前文介紹的計算方法僅限于規則波中(即獲得船體運動的傳遞函數),而實際海況是不規則且隨機的,譜分析可給出特定不規則海況下船體的響應。船體在波浪作用下的響應譜矩可表達為:

式中:為譜密度函數,本文采用ITTC雙參數譜[4]。
船體在不規則波中的統計預報一般采用短期預報方法。短期指在某海況下的一段時間(一般為3小時。在此期間,假定船體的裝載、航速、浪向以及海況條件均不變化。大量的實踐表明,船體運動幅值的短期響應服從Rayleigh分布。該分布只有方差一個參數,即

進而可得到船體運動短期預報的各種統計值,包括均值和有義值等。其中單幅均值:單幅有義值:
2 水動力計算與結果分析
2.1 計算模型
目標船型的主要參數如表1所示。
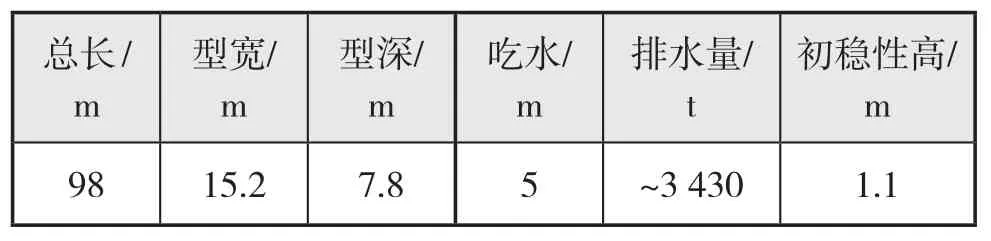
表1 目標船型主要參數
水動力計算模型包含濕表面模型與質量模型。濕表面模型表征船體在水下的部分,而質量模型表征船體質量在船體的分布情況。由于本文僅研究船體的運動特性,質量模型可以簡化,僅考慮質量的大小、質心位置與相關的質量慣性半徑。本船橫搖慣性半徑取0.38B[4],水動力濕表面采用HydroStar的HSMSH模塊生成,模型見圖1。
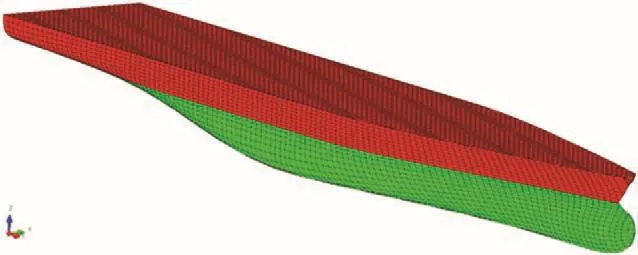
圖1 濕表面模型
入射波角頻率范圍為0.05 ~ 2.0 rad / s,取53個頻率點;浪向為0°~360°(浪向為船體與波浪的夾角),間隔為15°;此外,還需要定義入射海況和水深等參數。橫搖運動臨界阻尼系數取5%。
2.2 運動響應傳遞函數
為了便于結果分析,本文僅給出0°~180°(間隔為30°)的傳遞函數分析結果。
下頁圖2-圖4給出零航速時船體重心處垂蕩幅值、橫搖幅值與縱搖幅值的響應傳遞函數,圖5給出船體第19站垂向加速度的響應傳遞函數。
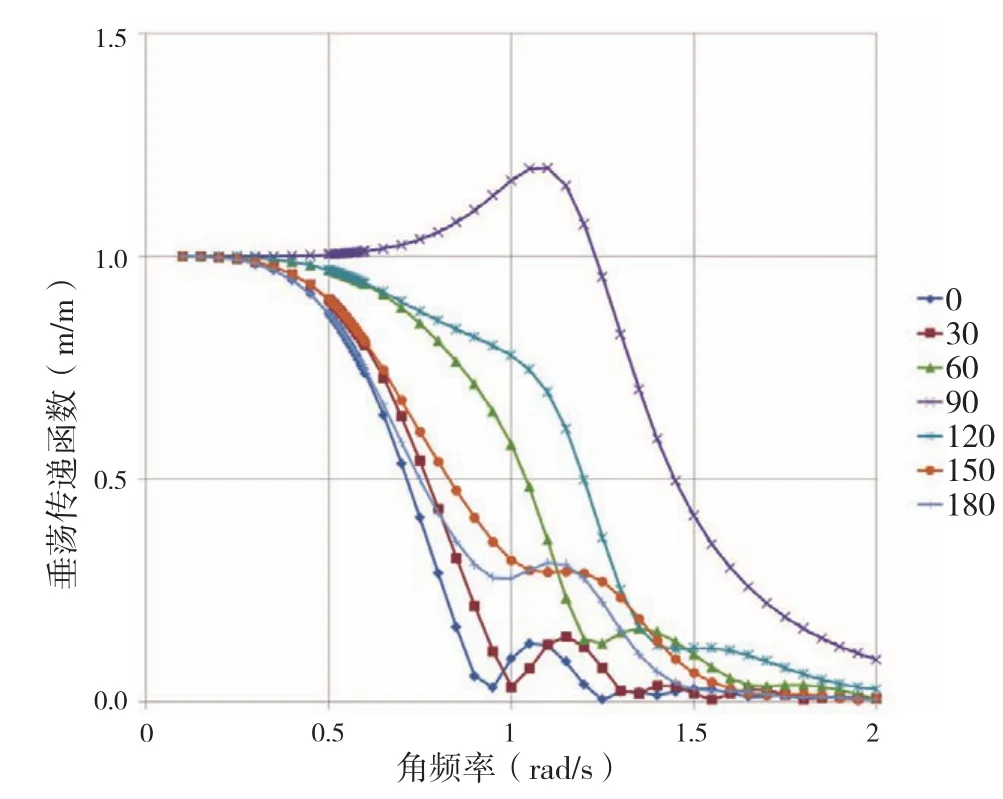
圖2 垂蕩幅值響應傳遞函數
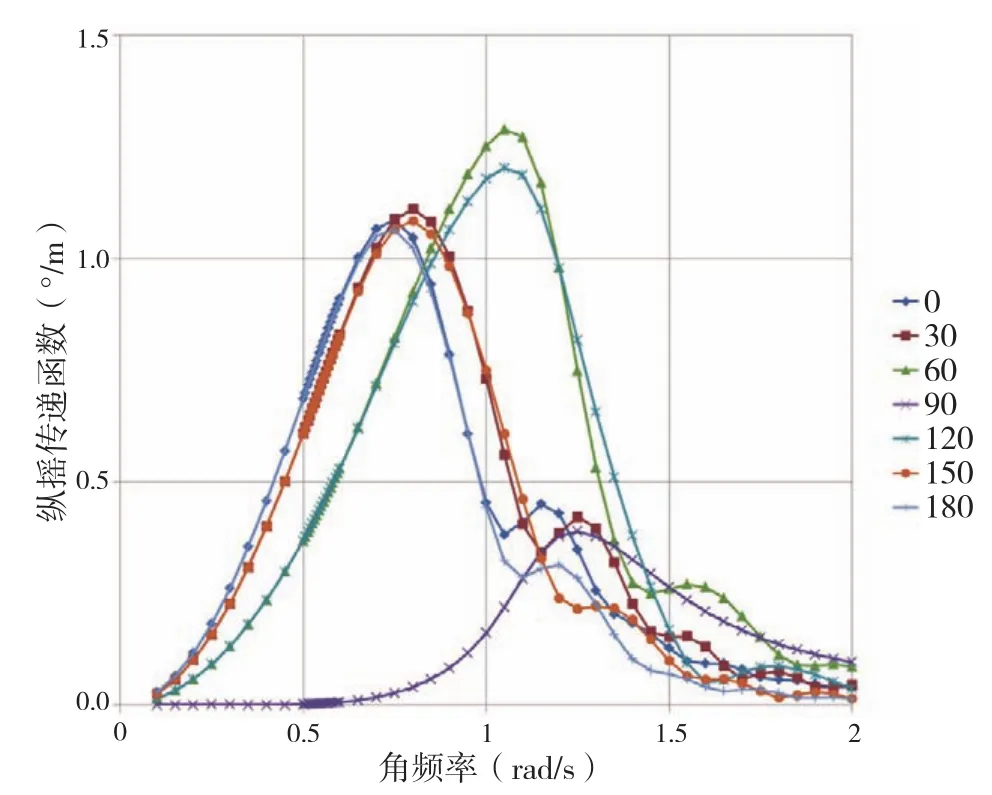
圖4 縱搖幅值響應傳遞函數
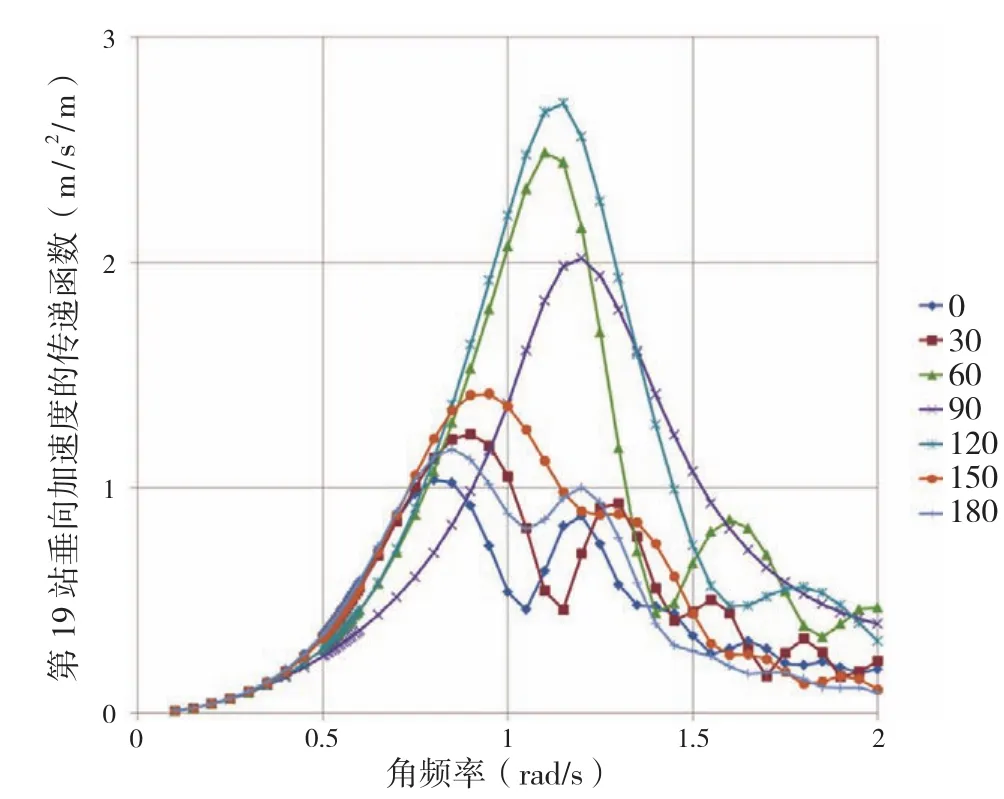
圖5 第19站垂向加速度的響應傳遞函數
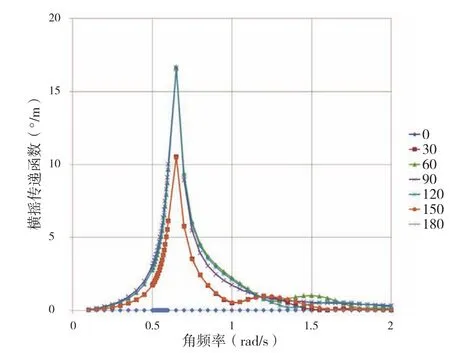
圖3 橫搖幅值響應傳遞函數
由此可見:
① 當波浪圓頻率趨向于0 rad / s(即波長趨向無限大時),此時船體的位置可以看成位于波峰或者波谷,那么船體的垂蕩幅值為1 m,橫搖幅值和縱搖幅值趨向于0°,參考點的垂向加速度趨向于0 m/s2。
② 當波浪的圓頻率趨向于2 rad / s(即波長趨向約15 m時),此時波長小于2倍船寬,波浪不具備使船體產生很大橫搖的擾動力矩,因此船體橫搖幅值很小;波長與船長的比值小于0.2,垂蕩幅值、縱搖幅值和參考點的垂向加速度都非常緩和;如果波浪的圓頻率繼續增大,波長繼續變小,那么以上參數均趨于0。
③ 當波浪圓頻率在某個范圍內時,以上參數均出現峰值區域(如橫搖),其峰值對應的波浪圓頻率在0.6 ~ 0.7 rad / s,軟件計算出的橫搖固有周期為9.77 s,固有周期與波浪周期接近,產生共振。
由計算結果可以得出:
① 浪向為90°,波浪的固有頻率在0.85 ~1.2 rad / s時,垂蕩幅值較大,最大值為1.20 °/m,對應的頻率為1.1 rad / s,浪向為90°。
② 浪向為60°~120°,波浪的固有頻率在0.58 ~0.7 rad / s時,橫搖幅值較大。最大值為16.67 °/m,對應的頻率為0.65 rad / s,浪向為60°。
③ 浪向為90°,縱搖幅值較小。其余浪向在特定的頻率段均有較大的響應值,且各浪向的最大響應值接近。最大值為2.58 °/m,對應的頻率為1.05 rad / s,浪向為60°。
④ 浪向為60°~120°,波浪的固有頻率在1.0 ~1.3 rad / s時,第19站垂向加速度的幅值較大。最大值為2.71 m/s2/m,對應的頻率為1.15 rad / s,浪向為120°。
2.3 短期預報
圖6 -圖9列出了零航速不同浪向下的橫搖有義值、垂蕩有義值、縱搖有義值與第19站垂向加速度有義值。
船體橫搖有義值在各浪向下的趨勢基本是一致的。浪向角為30°時,橫搖有義值的變化趨勢較為緩和;浪向角大于45°時,橫搖有義值的峰值已經較大,其中60°~ 90°浪向下的橫搖有義值基本重合。實船海上運行時,盡量把浪向角控制在30°以內,有利于降低船體的橫搖運動[5]。
船體垂蕩有義值隨著浪向角的增大而增大。在所研究的波浪平均跨零周期范圍內,浪向為0°與30°時,垂蕩有義值與波浪的平均跨零周期基本成線性關系。浪向為90°,平均跨零周期大于5.5 s時,垂蕩有義值穩定在峰值區域。
浪向角為0°、30°與60°時,船體縱搖有義值的最大值接近,只不過最大值對應的的波浪周期有些變化。浪向角為90°時,縱搖較小。
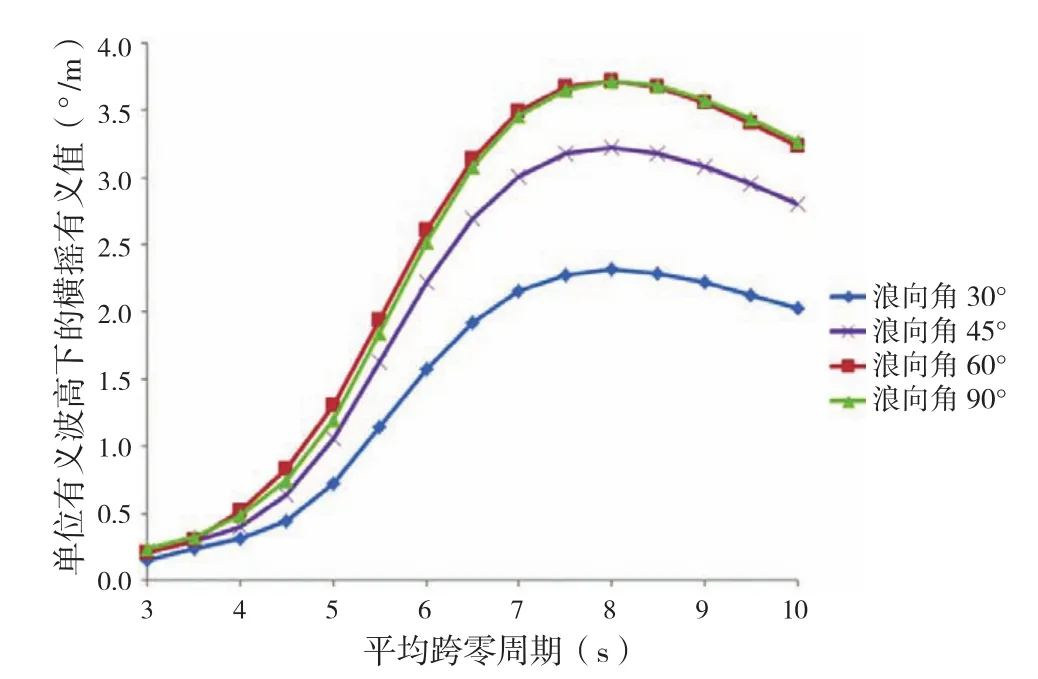
圖6 零航速不同浪向下的橫搖有義值
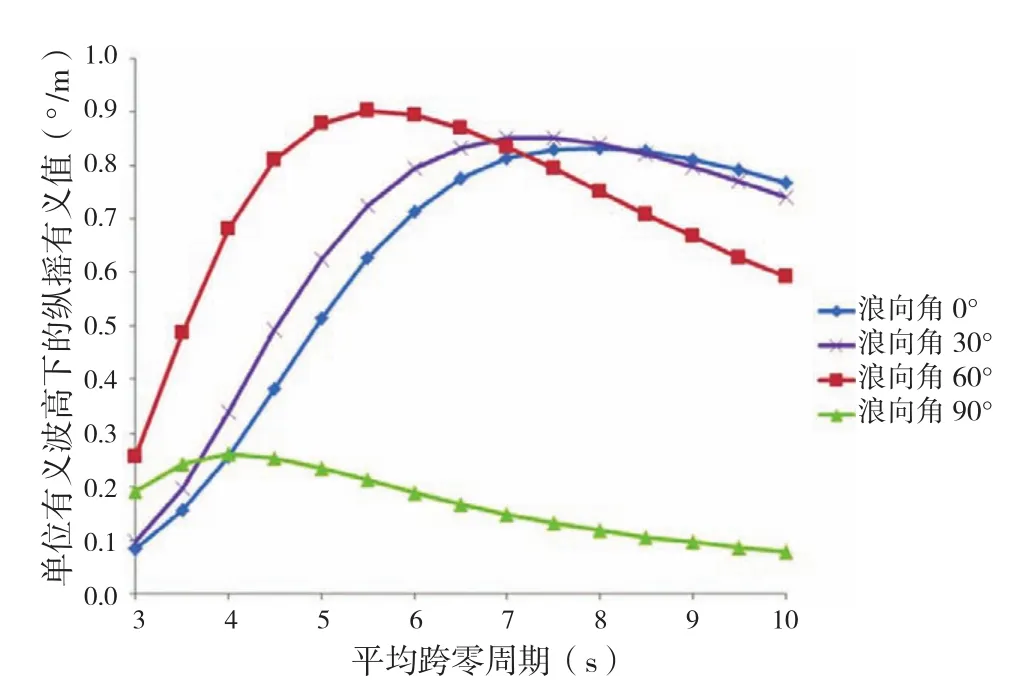
圖8 零航速不同浪向下的縱搖有義值
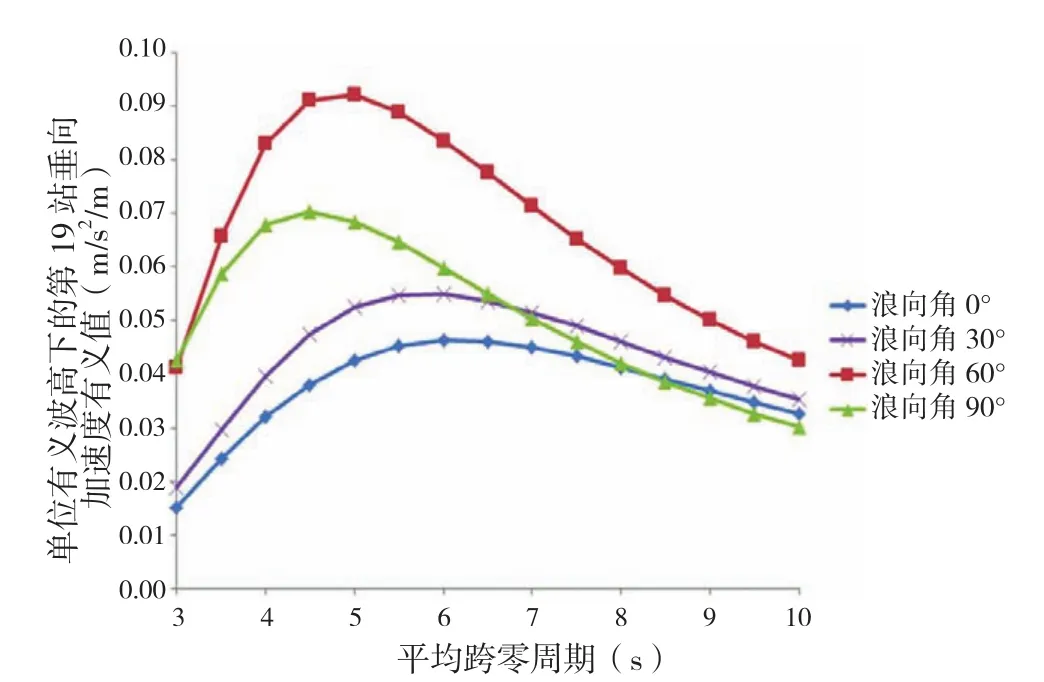
圖9 零航速不同浪向下的第19站垂向加速度有義值
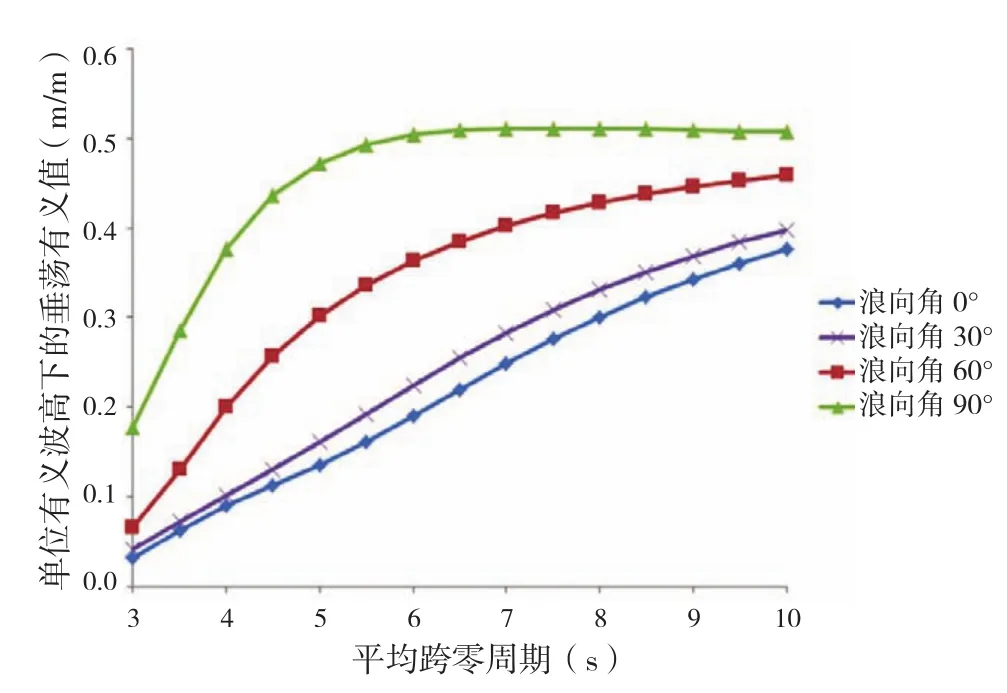
圖7 零航速不同浪向下的垂蕩有義值
第19站的參考點選在中縱剖面上,因此參考點的垂向運動主要是船體垂蕩和縱搖的合成作用。浪向角為0°、30°與60°時,參考點垂向加速度有義值隨著浪向角的增大而增大。浪向角為90°,波浪的平均跨零周期小于6s時,有義值僅次于60°浪向角時的有義值;波浪平均周期大于6s時,其有義值與0°和30°浪向角時的有義值相當。因此將浪向角控制在30°以內有利于降低參考點的垂向加速度。
圖10 -圖12給出了迎浪不同航速下的垂蕩有義值、縱搖有義值與第19站垂向加速度有義值。
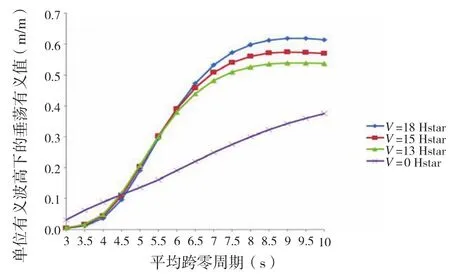
圖10 迎浪時各航速下垂蕩有義值
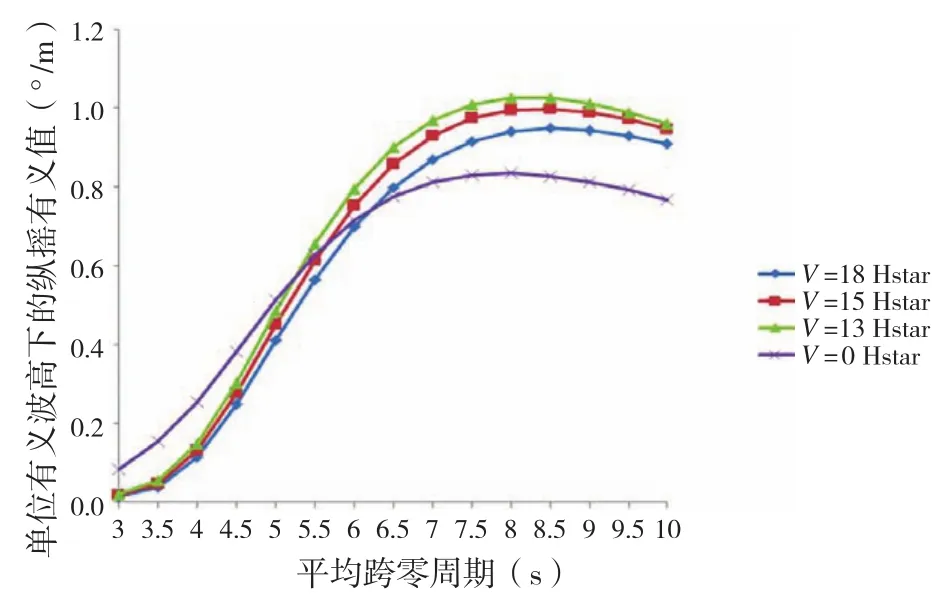
圖11 迎浪時各航速下縱搖有義值
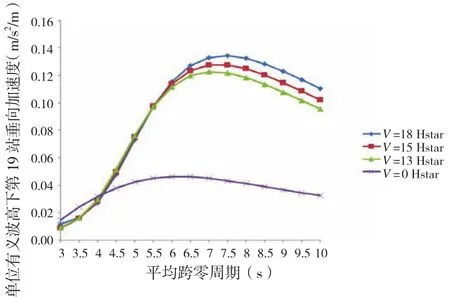
圖12 迎浪時各航速下第19站垂向加速度有義值
波浪的平均跨零周期小于6s時,船體在13 kn、15 kn與18 kn的垂蕩有義值基本重合;當周期大于6s時,垂蕩有義值的差別開始增大,但是總體趨勢仍保持一致,并且18 kn航速時的垂蕩有義最大。船體零航速迎浪時的垂蕩有義值接近于一條直線,當波浪的平均跨零周期小于4.5 s時,零航速的預報值比其余三個航速下的預報值大;當周期大于4.5 s時,則比其余三個航速下的預報值小。波浪平均跨零周期在7.5 s附近時,零航速預報值與其他三個航速預報值的差值最大;周期繼續增大時,差值開始減小。
各航速下的縱搖有義值整體趨勢保持一致,但是船體零速縱搖有義值與其他三個航速下的有義值差別稍大。波浪平均跨零周期小于5.5 s時,零速縱搖有義值偏大;當平均跨零周期大于5.5 s時,零速縱搖有義值偏小。
波浪平均跨零周期小于6s,航速為13 kn、15 kn或18 kn時,第19站垂向加速度有義值基本重合;當平均跨零周期大于6s時,加速度有義值的差別開始增大,但是整體趨勢仍保持一致。零速垂向加速度有義值與其余三個航速下有義值的差別較大。當波浪的平均跨零周期小于4 s時,零航速下的有義值比其余三個航速下的有義值大;當周期大于4 s時,則比其余三個航速下的有義值小。波浪平均跨零周期在7 s附近時,零航速有義值與其他三個航速有義值的差值最大;周期繼續增大時,差值開始減小。
3 數值計算與模型試驗結果對比
3.1 模型試驗與短期預報
船模試驗縮尺比為1∶32,模型的主尺度見表2。
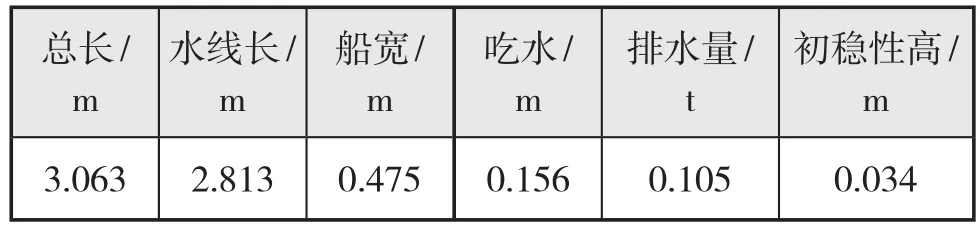
表2 目標船型主要參數
模型試驗使用的主要儀器有陀螺儀、三自由度適航儀、浪高儀和加速度計。
試驗在本院拖曳水池進行。
(1)模型試驗的主要內容
靜水中橫搖自由衰減試驗,記錄衰減曲線和橫搖周期;零航速橫浪規則波試驗,測量波浪幅值、波浪周期和橫搖幅值;迎浪的規則波試驗,測量波浪幅值、波浪周期、縱搖幅值、重心處垂蕩幅值、19站處垂向加速度幅值。
對每次試驗,取12個不同的波長,分別造出波高約為0.05 m的規則波,記錄下各物理量的時間序列并計算出其幅值大小,由此得到各物理量的幅值響應算子。
(2)短期預報
在有義波高為Hs、平均跨零周期為T2的不規則波中,零速橫搖的方差可由下積分得到:

橫搖的有義值則為二倍的均方差:

由此換算到不規則波的橫搖有義值。垂蕩、縱搖與垂向加速度有義值的換算與橫搖有義值的換算類似。
3.2 短期預報結果對比
目標船型零航速橫搖固有周期的預報值為9.77 s,模型試驗值為10.75 s,兩者相差約10%。
圖13為船體重心處零速橫搖有義值的結果對比。水動力預報曲線與模型試驗曲線的形狀和趨勢非常吻合,預報結果比模型試驗結果稍大些。
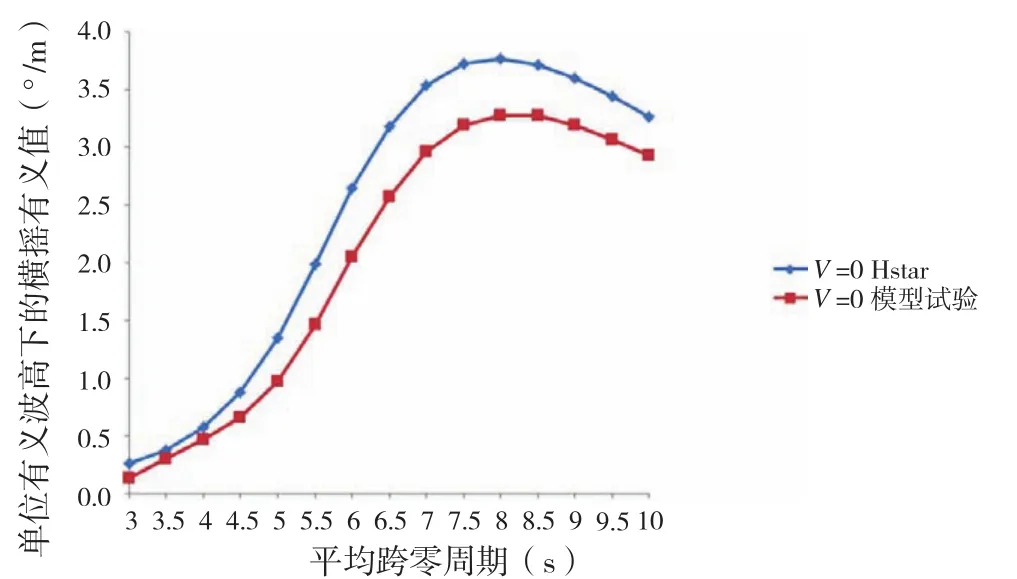
圖13 數值計算與模型試驗的橫搖有義值對比
圖14為船體迎浪、航速為13 kn的垂蕩有義值的結果對比。波浪的平均跨零周期在6s以下時,水動力預報結果與模型試驗結果吻合較好;在6s以上時,兩者的差距開始增大,水動力預報的結果較大。
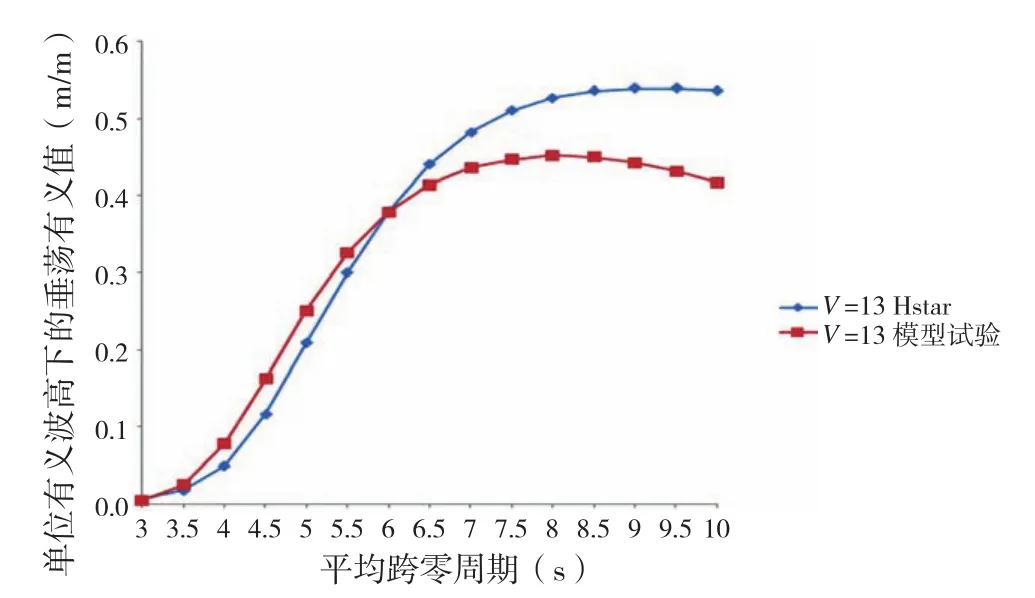
圖14 數值計算與模型試驗的垂蕩有義值對比
圖15為船體為船體迎浪、航速為13 kn的縱搖有義值的結果對比。可以看出水動力預報值與模型試驗值大致趨勢保持一致。當波浪平均跨零周期小于8.5 s時,模型試驗結果稍大;當周期大于8.5 s時,水動力分析結果稍大。
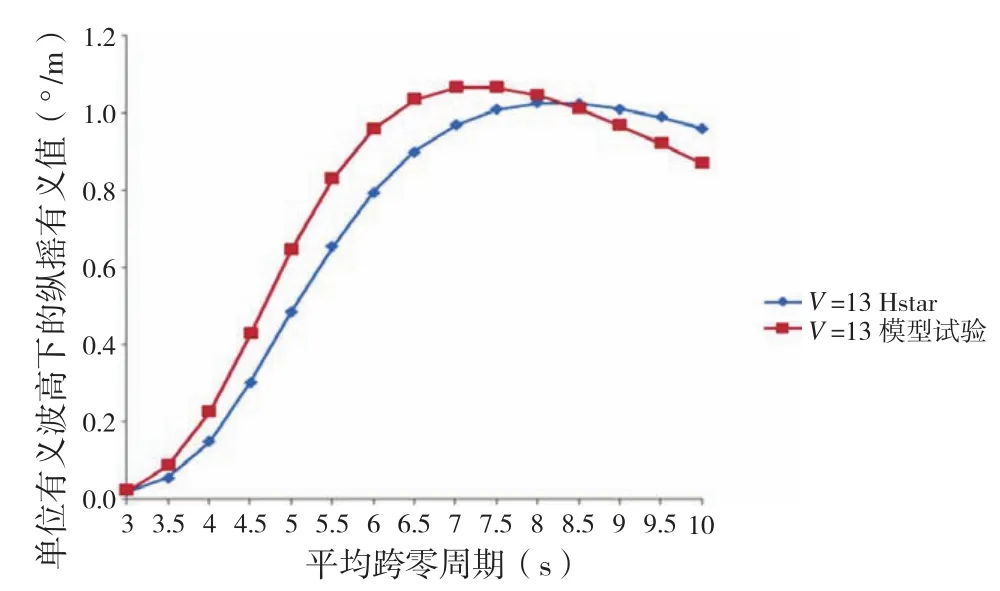
圖15 數值計算與模型試驗的縱搖有義值對比
下頁圖16為船體迎浪、航速為13 kn、第19站垂向加速度有義值的結果對比。在各航速下,水動力預報值與試驗值的趨勢都是保持一致的。
限于篇幅,目標船型的航速為15 kn與18 kn時模型試驗與數值分析結果的對比此處不再贅述。
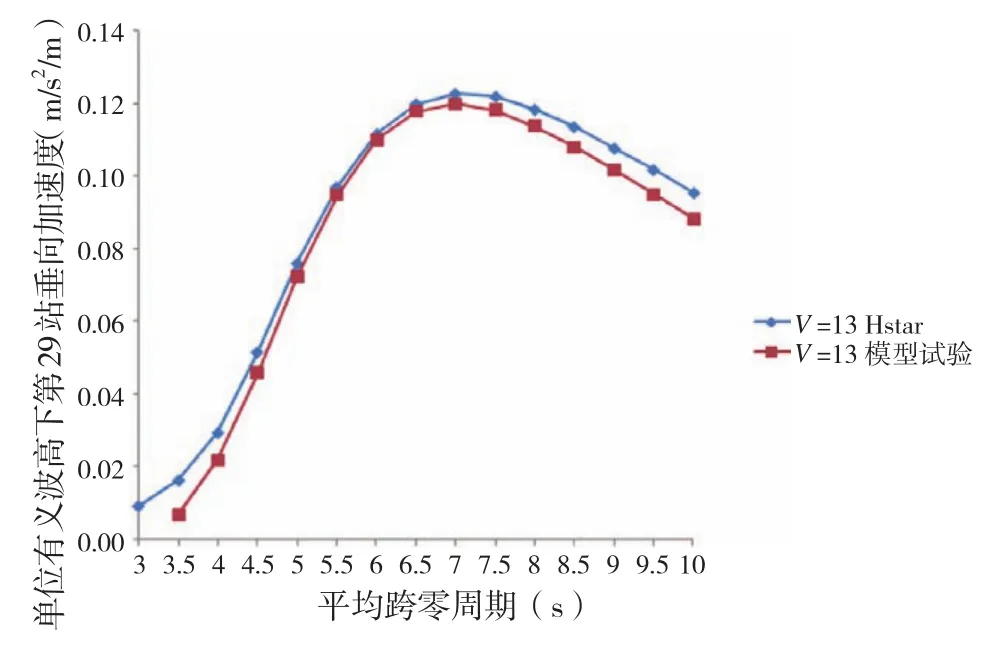
圖16 數值計算與模型試驗的第19站垂向加速度有義值對比
4 結 論
本文采用基于三維頻域勢流理論的水動力軟件HydroStar,對某3 000 t海上巡視船的耐波性能進行分析。零航速時,將浪向角控制在30°以內有利于降低船體的橫搖、垂蕩和參考點的加速度;縱搖僅在橫浪時較小,其余浪向下均會出現較大峰值。迎浪航行時,適當降低航速,有利于降低船體垂蕩以及參考點的加速度,但對縱搖的影響不太明顯。
此外,本文對比了數值分析與模型試驗的結果。水動力預報值與模型試驗值的趨勢基本一致,除了垂蕩在部分周期的差值稍大,其余預報值與模型試驗值的匹配性均較高。
[1] HSMSH,User’s and Example Manual[M]. Bureau Veritas,2011.
[2] Hydrostar for Experts,User Manual[M] . Bureau Veritas,2011.
[3] Starspec,Hydorstar User Guide[M] . Bureau Veritas,2011.
[4] 盛振邦,劉應中.船舶原理(下)[M].上海:上海交通大學出版社,2004.
[5] 劉宇辰,任毅,蔡新功.三體船橫搖運動試驗研究[J].船舶,2011(2):20-23.
Seakeeping performance of 3 000 t off shore patrol vessel
LIU Wei1,2JIANG Ru-hong1HUANG Ai-xiang2
(1. Shanghai Jiaotong University, Shanghai 200030, China;2. Marine Design & Research Institute of China, Shanghai 200011, China)
This paper carries out the seakeeping performance of a 3 000 t patrol vessel by the three-dimensional hydrodynamic theory. In addition to the response amplitude operators of heave, roll, pitch and vertical motion of reference points at zero speed, it also show their signifi cant value at 0 kn, 13 kn, 15 kn and 18 kn, and compares with the model test results. It shows that the results of hydrodynamic prediction is in accordance with those of the model tests.
seakeeping performance; patrol vessel; hydrodynamic analysis; model test
U661.32
A
1001-9855(2014)05-0024-07
2013-06-05 ;
2014-08-20
劉 巍(1980-),男,工程師,研究方向:船舶設計與研究工作。
蔣如宏(1972-),男,副教授,研究方向:船舶與海洋結構物設計建造方面的研究。
黃嬡翔(1983-),女,工程師,研究方向:船舶研究與管理工作。