基于GPS數據的MODIS大氣可降水量反演精度提高模型
2014-08-03 02:39:32曹艷豐陳寶獻陳秀萬肖漢
遙感信息 2014年2期
曹艷豐,陳寶獻,陳秀萬,肖漢
(1.北京大學遙感與地理信息系統研究所,北京 100871;2.四川省若爾蓋縣氣象局,四川 若爾蓋 624500)
1 引 言
目前,MODIS數據反演PWV的方法已經比較成熟,其算法主要有經典的二通道比值法和三通道比值法,但 MODIS數據反演的PWV(以下簡稱MODIS PWV)和無線電探空儀數據反演的PWV(以下簡稱探空PWV)相比,精度不是很理想。自上世紀90年代由Bevis和Busing提出了利用地基GPS遙感大氣綜合水汽含量的基本原理和方法后,國際 上 比 較 著 名 的 GPS/STORM,WWAVE,CLAM等實驗均證明了利用GPS遙感包含在中性大氣中的綜合水汽含量PWV的可行性。20世紀90年代,Bevis、Rocken、Duan等人在不同時間證明了利用GPS PWV與探空PWV的精度在同一個水平上[1]。
傳統的無線電探空儀數據探測PWV精度很高,但是其成本高、時間分辨率差(一天觀測兩次),已經不能滿足對PWV的觀測需求;地基GPS站點時間分辨率非常高,只要能設定GPS站點的地點都可以進行PWV反演,將GPS反演的PWV(以下簡稱GPS PWV)替代成本高的探空PWV優勢明顯。崔彩霞等根據烏魯木齊地區的MODIS PWV與GPS PWV對兩者進行了對比分析[2],侯建國等根據西安地區的GPS觀測數據、地面氣象實測數據和對應的MODIS數據初步研究了GPS與MODIS反演水汽值之間的回歸關系[3]。
本文選擇美國地基GPS站點密集區作為研究區域,對GPS PWV、MODIS PWV以及探空PWV進行對比研究,得出了GPS PWV的精度在mm級別的結論,最后應用最小二乘法構建了基于GPS PWV的MODIS PWV精度提高模型,為大氣水汽變化提供了一個更加有效的監測手段。
2 MODIS近紅外水汽反演原理
MODIS反演PWV的方法是比較吸收波段和臨近的非吸收波段的地表反射的太陽輻射[4]。“太陽—地面—傳感器”路徑上的0.86μm~1.24μm間的太陽輻射受到水汽吸收,氣溶膠散射和地表反射。衛星傳感器所接收的入瞳輻射亮度的簡化形式可以表示為[5]:

其中,λ為波長,Lsensor(λ)為傳感器所獲得的入瞳輻射亮度,Lsun(λ)為大氣層頂太陽輻射亮度,T(λ)為總的大氣透過率,ρ(λ)是指地表的雙向反射率,Lpath(λ)是指程輻射。式(1)忽略了光子在地表的上的多次反射,即假設光子在地表上只反射一次。反饋機制包括大氣對地表的后向散射。這個反饋效果通常很小,因為氣溶膠光學厚度通常在近紅外區域通常很小。式(1)右邊第一項可以看作是地表直接反射的太陽輻射項,用Ldirect表示。而將Lsensor(λ)/Lsun(λ)定義為表觀反射率,用ρ*(λ)表示。因此式(1)又可以改寫為[7]:

在忽略Lpath(λ)的情況下,可以將式(2)改寫為[5]:

不同下墊面在同一波長上的反射率不同,因此不可能通過單一通道的輻射獲得水汽的透射率。然而如果地面的反射率不隨波長變化,路徑輻射只是太陽直接反射輻射中的小項,在水汽吸收通道上,水汽的透射率就可以通過一個吸收通道與一個窗區通道的比值得到[6]。表1是MODIS中用于反演水汽的通道。例如0.94μm的二通道和三通道透射率可表示為[5]:

如果地面發射率隨波長是線性變化的,水汽吸收通道上的水汽的透射率就可以通過一個吸收通道與兩個窗區通道的比值得到[8]:

其中,c1=0.8,c2=0.2。
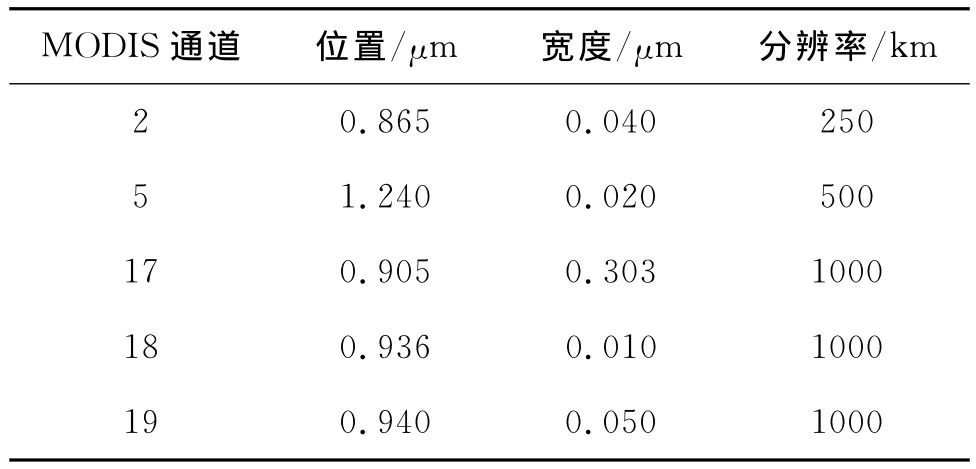
表1 MODIS用于反演水汽的通道
3 MODIS PWV和GPS PWV的對比分析
3.1 數據的獲取
研究區的選擇要符合的條件主要是GPS站點密集區域。SuomiNet是由美國諸多高校和美國科學基金會共同建立的、一個針對大氣調查和教育的實時的國際GPS站點網絡。SuomiNet免費提供了包括GPS原始數據和GPS PWV在內的多種數據。根據SuomiNet中GPS站點分布情況,選取的研究區域如圖1的4°×4°的區域,研究區內共25個可用GPS站點。
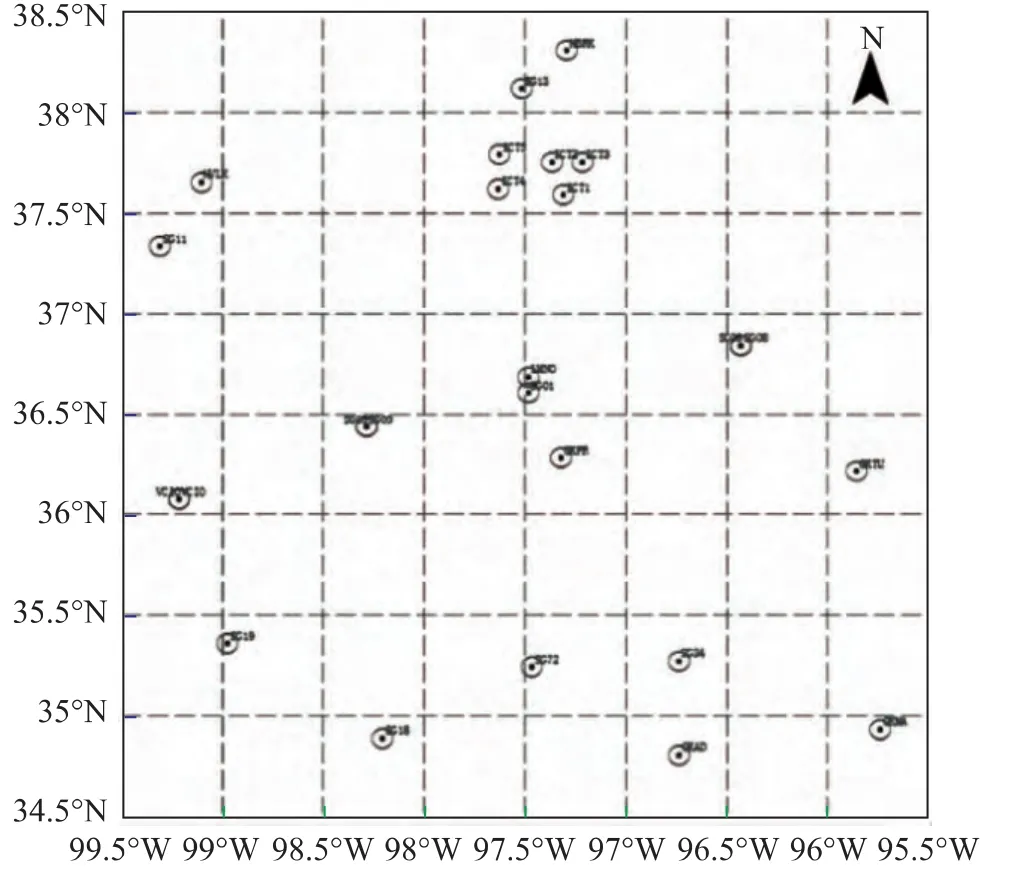
圖1 選區和GPS站點分布
從美國國家航空航天局(National Aeronautics and Space Administration,NASA)官 方 網 站(http://ladsweb.nascom.nasa.gov/data/search.html)下載包含該區域2008年156天~204天和2009年第98天~272天MODIS原始波段數據、1B級數據中的MOD03數據(地理定位數據)和2級數據中的MOD05數據(水汽產品數據),下載數據的考慮主要是雨水豐沛的日期。因為有云條件下反演的是云上的可降水量[3],剔除有GPS站點對應位置有云圖像,最終選擇晴空區域。
3.2 數據的處理
使用 MRT(the MODIS Reprojection Tool)對下載的數據進行裁剪和WGS84重投影,使用ENVI軟件對MODIS原始波段數據進行二通道和三通道PWV反演,最后根據經緯度提取GPS站點位置的對應的MODIS PWV值。本研究不做GPS數據反演PWV的過程,直接利用SuomiNet提供的當期站點數據,選取MODIS數據同時期或者MODIS數據前后兩個時間點的數據,然后按時間內插出相應時間的GPS數據。由于SuomiNet提供GPS PWV的時間間隔為15分鐘,時間分辨率足以滿足內插的要求。最終,共計337組符合要求的數據。337組數據的折線圖如圖2所示,其中80組~140組的局部放大圖如圖3所示;同時繪制GPS PWV與MODIS PWV二通道、三通道結果差值的頻率直方圖如圖4所示。

圖2 W19_2,W19_3,MOD05和GPS PWV之間的對比

圖3 W19_2,W19_3,MOD05和GPS PWV之間的對比
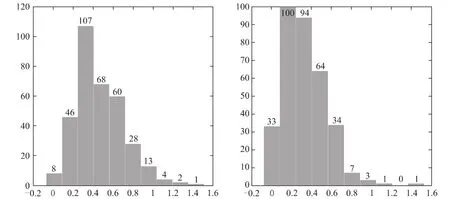
圖4 GPS PWV與 W19_2、W19_3差值的頻率直方圖(左為GPS PWV與 W19_2,右為GPS PWV與 W19_3)
3.3 反演結果相關性分析
從圖2可以看出二通道反演PWV(記作W19_2)、三通道反演PWV(記作 W19_3)、MOD05、GPS PWV之間有很好的相關性,具體統計結果如表2和表3所示。由此可得出以下結論:
①GPSPWV、W19_2、W19_3以及 MOD05之間具有很好的線性相關性,數值滿足結果:MOD05>GPS PWV>W19_3>W19_2。
②W19_2和 W19_3的結果相比而言,平均相對誤差為8.10%,數值非常接近。而 W19_3和W19_2與GPS PWV相比,平均相對誤差分別為27.26%,17.67%,平均相對誤差都比較大。
③GPS PWV與 W19_2和 W19_3的差值的頻率直方圖基本相符,GPS與二通道反演差值最大頻率區間為0.2cm~0.4cm,平均值為0.46cm,均方根誤差為0.24;GPS與三通道反演差值最大頻率區間為0.1cm~0.2cm,平均值為0.34cm,均方根誤差為0.22。
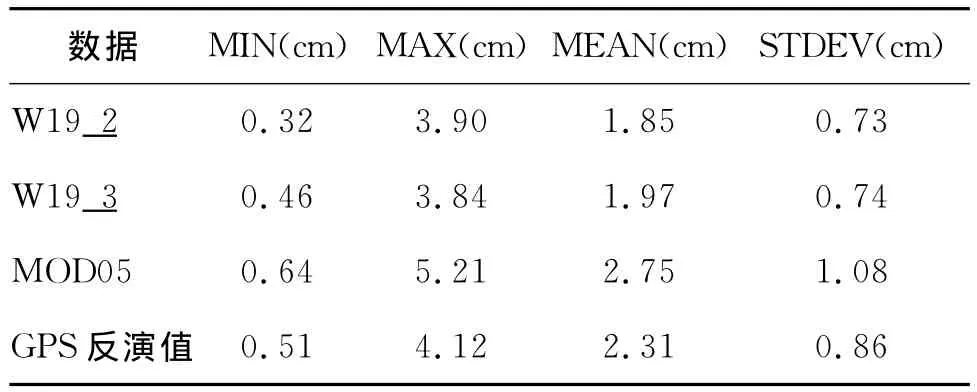
表2 4種數據的統計結果表
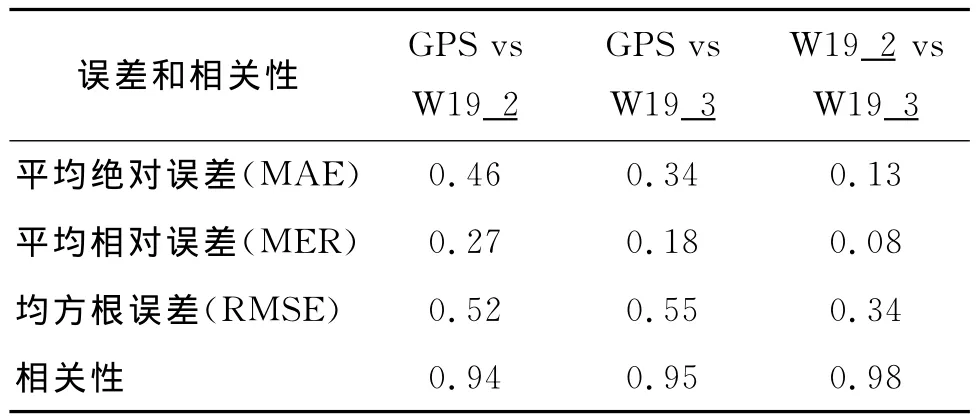
表3 三組數據之間的誤差分析
3.4 GPS PWV的精度分析
為驗證研究區域內地基GPS PWV精度,將探空PWV作為標準,對比驗證了地理位置最接近的一組GPS PWV與探空PWV:LMNO GPS站與LMN探空站水汽值,站點信息如表4所示。

表4 GPS站點和探空站站點信息
探空PWV利用從NOAA/ESRL Radiosonde Database下載探空觀測資料,根據探空數據的算法[10]解算得出PWV。LMNO與LMN水汽值對比時段為年積日2009年152天~159天,LMNO每半小時提供1次GPS PWV數據,LMN每天提供4次探空PWV數據,除去部分GPS PWV數據缺失,實際比對數據共29對。站點水汽值的對比結果如圖5所示。由圖5可知:GPS PWV與探空PWV數據吻合程度很好,且變化趨勢基本一致,說明GPS PWV反演精度與探空PWV相當,二者具有較強的相關性。
兩組GPS PWV與探空PWV的散點圖如圖5所示,兩組GPS PWV值精度分析結果如表5所示。可見:
①GPS PWV與探空PWV間具有很強的相關性。LMNO與LMN PWV間的相關系數達到0.90。
②GPS PWV的精度可達毫米級。LMNO站的 MAE為1.54mm,RMSE為1.82mm,MRE為5.20%。說明GPS PWV具有mm級精度,說明其反演精度與探空觀測相當。

圖5 LMNO與LMN站點GPS PWV與探空PWV對比

表5 LMNO站點與LMN站點PWV精度分析
4 實時精度提高模型
實時精度提高模型基于當期實時的GPS PWV,對當期的MODIS PWV進行校正。為充分利用高精度的實時GPS PWV來校正MODIS PWV,可利用當期的GPS PWV和對應坐標處的MODIS PWV數據構建某種變換,對整幅MODIS PWV圖像進行校正,在保持MODIS PWV面狀數據分布特征的前提下,使校正后的圖像在GPS坐標處的水汽值盡可能接近GPS PWV。實時精度提高模型可用圖6來表示,其中曲線表示MODIS PWV圖像的某條縱切線,“·”表示地理坐標在這條MODIS PWV切線上的GPS PWV點。實時精度提高模型要使MODIS PWV圖像經過校正后,盡量通過所有的GPS PWV點,即使GPS PWV點坐標處的MODIS PWV值在校正后盡量接近GPS PWV值。
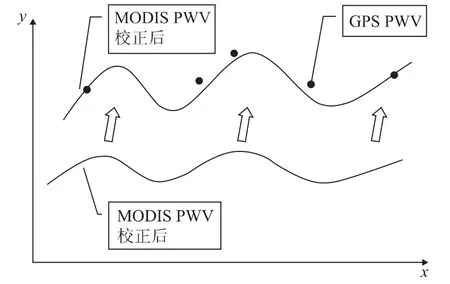
圖6 MODIS反演PWV實時精度提高模型示意圖
本研究將基于當期實時GPS PWV和MODIS PWV數據構建普通最小二乘回歸線(Ordinary Least Squares Regression Line)模 型[9]來 校 正MODIS PWV,即構建線性模型:

其中,PWVMODIS、分別為校正前和校正后的MODIS PWV值,a、b為當期的系數。實時精度提高模型使得當期GPS PWV值與對應坐標處校正后的MODIS PWV值的差的平方和最小,即使得(-)2最小。系數a、b的最小二乘估計量為:


實時精度提高模型通過利用當期實時GPS PWV和對應的 MODIS PWV數據計算系數a、b,以構建當期線性模型來對當期MODIS PWV圖像進行校正。由于充分利用當期高精度的GPS PWV數據,校正后MODIS PWV值盡可能接近GPS PWV值,校正的針對性和精度更高。
5 結束語
本研究獲取了GPS站點密集區域的GPS PWV、W19_2、W19_3及 MOD05數據,得出了它們之間有很強的線性相關性的結論。根據地基GPS PWV無線電探空數據驗證了GPS PWV反演的精度在毫米級別,由于 MODIS分辨率較低,并且MODIS PWV反演精度較低。最后,本研究用最小二乘回歸法構建了基于GPS PWV的MODIS PWV精度提高模型。如何設計出符合實際需要、不同地區的“GPS反演結果提高MODIS反演結果的精度”的系統軟件,并由此擴展到各種水汽資料的集成反演,將是本研究的歸宿。另外,由于探空氣球的僅探測30km左右的高度,解算出的PWV偏小,需要進一步通過標準大氣補充至100km。
[1]ROCKEN C,VANHOVE T,BEVIS M,et al.GPS/STORM-GPS sensing of atmospheric water vapor for meterology[J].Journal of Atmospheric and Oceanic Technology,1995,12(3):468-478.
[2]崔彩霞,楊青,趙玲.MODIS近紅外大氣可降水含量與烏魯木齊地基GPS水汽數據的對比分析[J].沙漠與綠洲氣象,2008,2(1):1-4.
[3]侯建國,楊成生,張勤.GPS可將水汽與 MODIS可降水汽回歸性分析[J].地理與地理信息科學,2010,26(2):42-45.
[4]姜立鵬,覃志豪,謝雯.針對 MODIS紅外數據反演大氣水汽含量研究[J].國土資源遙感,2006(3):5-9.
[5]GAO B C,KAUFMAN Y J.The MODIS near-IR water vapor algorithm[EB/OL].http://modis-atmos.gsfc.nasa.gov/_docs/atbd_mod03.pdf,2006-11-17.
[6]ABERT P,BENNARTZ R,PREUSKER R,et al.Remote sensing of atmospheric water vapor using the Moderate Resolution Imaging Spectroradiometer[J].Notes and Correspondence.2005(22):309-314.
[7]KAUFM Y J,GAO B C.Remote sensing of water vapor in the near IR from EOS/MODIS[J].Transaction on Geoscience and Remote Sensing,1992,5(30):871-884.
[8]盧士慶,閆賓,劉曉東.集中求算大氣可降水量方法比較[J].內蒙古氣象,2009(1):15-16.
[9]JAMES H S,MARK W W,王慶石.Introduction to econometrics[M].大連:東北財經大學出版社,2005:64-69.
[10]朱文明.基于MODIS大氣水汽的時間變化及其與氣象因子的相關分析[D].南京:南京師范大學,2007.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
軍事文摘(2023年10期)2023-06-09 09:15:06
空間科學學報(2021年4期)2021-08-30 08:31:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
核科學與工程(2015年4期)2015-09-26 11:59:03
世界知識畫報·藝術視界(2010年9期)2010-12-31 00:00:00