衛星姿態數據的自動處理
2014-08-03 02:39:34李奇王鵬波鄧國臣
遙感信息 2014年2期
李奇,王鵬波,鄧國臣
(1.61206部隊,北京 100042;2.61540部隊,西安 710054;3.61618部隊,北京 102102;4.中國測繪科學研究院,北京 100039)
1 引 言
衛星姿態數據存在兩種格式:歐拉角和四元數方式。歐拉角方式的姿態數據是通過3個姿態角(滾動角、俯仰角和偏航角)來描述衛星本體坐標系統到衛星軌道坐標系統的轉換。四元數方式的姿態數據是通過4個元素構成的單位向量來描述衛星本體坐標系統到地球慣性不變坐標系統的轉換。四元數與歐拉角方式的姿態數據存在一一對應的轉換關系,其轉換涉及到衛星軌道坐標系統到地球慣性不變坐標系統的轉換。
本文為了說明問題,以天繪一號衛星(TH-1)的姿態數據為例進行分析,處理過程中用到的姿態數據均以四元數的方式給出。本文通過對姿態數據跟蹤發現,星敏數據存在少量的噪聲點或零值現象,分析原因是其在接收時,由于受到外界干擾,例如大風或其他原因引起接收器震蕩不穩,或受到異常電磁脈沖影響,導致產生隨機噪聲。由于隨機噪聲的產生原因復雜,難以歸納噪聲點出現的特征規律,而星敏數據的精度要求較高,數據質量的好壞對于影像產品的幾何精度影響非常大,所以在這里研究衛星姿態數據的自動處理技術,提高衛星姿態數據的質量,具有重要的實用價值。
2 TH-1衛星姿態數據分析
為簡化問題模型,本文以某次拍攝任務的一個星敏數據為例,對姿態數據的自動處理進行研究。
2.1 姿態數據的整體情況分析
繪出原始星敏數據的散點圖,其整體情況如圖1所示。
通過這些圖得知,四元組的整體情況為趨于平滑的曲線。但存在部分噪聲點或異常點。這樣的q值,在計算過程中,會導致圖像生產的過程中嚴重出錯或出現圖像內部畸變,因此在解析后需要將這些點濾掉。
2.2 姿態數據的局部情況分析
通過分析姿態數據的局部情況可知,其q值與時間的變化如圖2所示。
在局部分析中發現星敏的階躍是一種普遍現象,每4個點附近都要發生一次。根據數據格式規范,下行數據的每個點值都重復4次記錄,對于這種情況,合理的處理方式是必須去掉重復和錯誤的點值,并且利用曲線擬合的方法獲取給定時間的四元數。

圖2 星敏四元數的局部效果圖
2.3 姿態數據的規律特性分析
通過對姿態數據的深入分析,可以總結出數據具備以下特點:
(1)噪聲數據的跳變特性
通過圖1可以看出,發生跳變的噪聲點值與實際值偏差較大,這種粗差應通過濾波的方式將其刪除,以免對其他觀測值造成影響。
(2)采樣點重復記錄
通過圖1可以看出,對于同一個時刻的星敏數據,重復采樣了4次,因此需要在處理前去掉重復點。
(3)觀測數據的時間等距特性
根據數據格式規范和星敏試驗數據的實際內容可以看出,除了漏接或重復記錄的時間段外,觀測數據的采樣時間間隔是固定的(0.5s)。
(4)數據的連續特性
根據圖1、圖3可以看出,觀測數據在整體上是一條趨于平滑的曲線,根據天體運動相關原理,星敏四元數的實際數值(即真值)應平滑變化,不應發生跳變,因此可以通過擬合的方式,對原始星敏數據的質量進行優化。
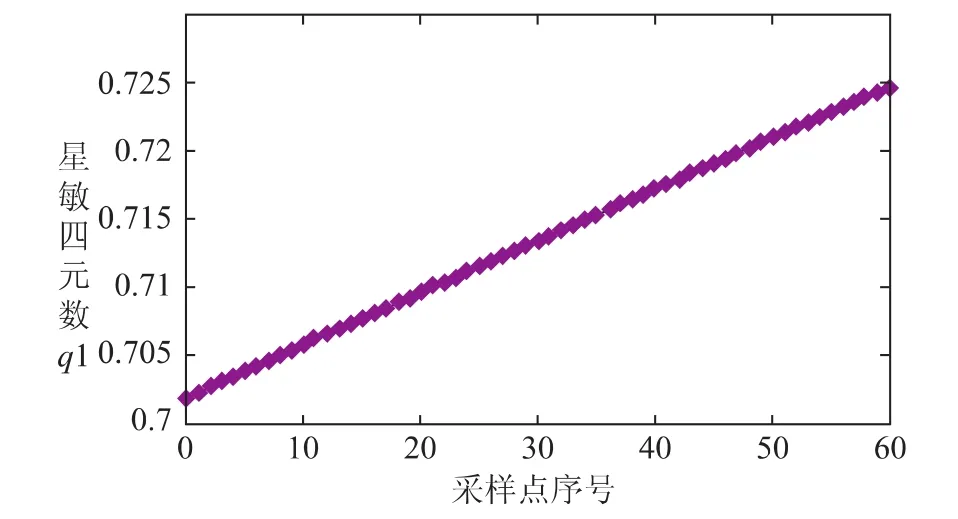
圖3 初始化后的隊列行時標
3 技術與方法
根據前面分析的觀測數據的特征規律,制定了相應的解決方案,具體步驟如下。
①載入姿態數據;
②去重和補空。采用投票方式,將重復的、不可信的數據剔除。檢測時標數據的連續性,將漏接時間的對應數據標記為“null”(空);
③去噪。目的是將原始星敏數據中的噪聲剔除,并將其數值標記為“null”,使其不能參與擬合過程,以免影響多項式擬合的精度;
④擬合。分別對星敏的各個分量采用整軌二次多項式曲線擬合的方法,以獲取更加平滑的姿態數值,消除數據抖動對圖像產品帶來的彎曲和內部畸變現象;
⑤結果輸出。
3.1 姿態數據的去重和補空
由于姿態數據存在重復和漏接問題,因此在數據去噪和擬合之前,應先解決這方面的問題,本文設計了對應方案,具體步驟如下。
①載入姿態數據;
②初始化隊列數據。隊列數據是由一系列數據包組成的序列,每個數據包中包含行時標信息和這個行時標所對應的各個星敏的四元數信息。這個步驟的主要工作是依據原始星敏數據中的起止行時標信息,確定隊列數據的隊列長度,給行時標數據賦值(步長為0.5s遞增),然后將每個行時標對應的各個星敏的四元數信息都標記為“null”;
③姿態數據的去重。在本文中,去重工作主要是依據投票原理進行。同一時標被重復記錄4次,將4次的星敏四元數大小進行比較,相等次數最多的那個數值被解釋為可信度最高,將其賦值給隊列中相同行時標對應的星敏四元數,如果沒有找到,則跳過,進行下一步星敏數據的去重,直到結束。
3.2 姿態數據的去噪
姿態數據去噪的目的是將發生跳變的異常數據剔除,只留下有效的星敏數據,以免影響擬合多項式的精度。
綜合考慮姿態數據變化速度緩慢的規律特征,本文采用遞推差值的方法去除噪聲。根據實際數據統計發現,相鄰兩組星敏數據差值的絕對值大小都在某一狹窄區間內。將隊列內的星敏數據依次做減法運算,并根據不同差值做相應處理,很好的完成了姿態數據噪聲的去除,具體流程如圖4所示。其中,Qj為待處理的星敏數據序列,Δ表示兩次星敏采樣數據的差值,Ω為相鄰兩次星敏采樣數據的差值空間。
需要注意的是,當流程圖中j-i>0時,表示數據中連續出現空值點的個數大于1,因此Δ允許的數值范圍也需擴大相應倍數,在流程圖中以“Ω×(j-i+1)”形式表示。
3.3 姿態數據的自動修復
經過前面的去重、補空和去噪處理,當前隊列中除了空值外,其余數據都為有效數據。根據星敏數據的散點圖可以看出,當擬合多項式的次數為2時,擬合函數就可以很好的描述星敏數據的軌跡曲線。
本文的解決思路是采用最小二乘法對有效的星敏數據進行二次多項式擬合,求出擬合多項式,最后將所有行時標重新代入擬合多項式,求出對應時刻的星敏數據,即完成了姿態數據的自動處理。

圖4 姿態數據的自動去噪
假定行時標用xi(i=0,1,…n)表示,對應時刻的星敏四元數用yi(i=0,1,…,n)表示,需要擬合的有效數據個數為n,構造函數f(x)=a0+a1x+a2x2,式中,a0、a1、a2為多項式系數,滿足


式(3)是關于a0、a1、a2的線性方程組,用矩陣表示為
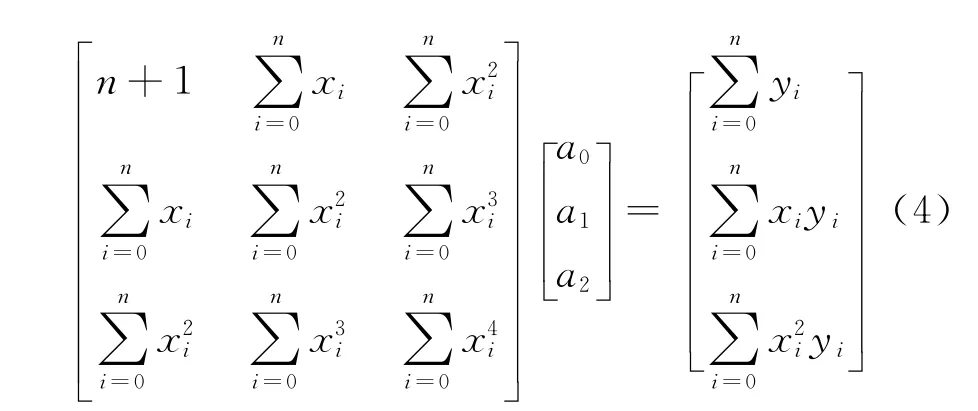
解方程組即可得出多項式系數a0、a1、a2的值。
4 實驗驗證
為明確測量值與擬合值的偏離程度,本文隨機對采樣數據中連續10個采樣點做了記錄,具體結果如表1所示。
下圖是對星敏數據進行自動處理后的效果展示。
從處理后的星敏數據散點圖可以看出,與處理前相比:
①處理后數據消除了重復數據和噪聲數據,提高了數據整體的可信度;
②處理后數據在整體分布上更均勻,過渡更加平滑;

表1 星敏數據自動處理效果實驗對比

圖5 星敏四元數的處理后整體效果圖(與圖1對應)

圖6 星敏四元數處理前后局部對比圖(采樣點序號0∶60)
③該方法對于局部有抖動現象的數據(如四元數q0、q2)質量明顯改善。
5 結束語
本文針對TH-1衛星下傳的姿態數據進行了深入分析,通過設計合理方案,實現了對原始星敏數據的自動去重、補空、去噪和擬合。通過實驗驗證,姿態數據經過處理后,不僅能夠完全去除噪聲點和重復記錄的數據,而且還可以通過擬合的方式將短時間漏接的數據還原,數據質量有明顯改善。通過該方法生產處理的姿態數據可直接用作衛星數據的定姿計算。
下一步的研究方向:
(1)采用高次(3~8次)多項式擬合的方法對姿態數據進行擬合,研究擬合函數的次數對于擬合結果的影響情況,深入分析不同情況下的精度偏差情況,選取更合理的擬合方法;
(2)本文只是針對1次拍攝任務的姿態數據進行研究和處理,下一步要增加試驗數據的采樣范圍,將時間跨度增加到2個月甚至更長,進一步研究姿態數據變化的周期性規律;
(3)如果姿態數據中漏接的時間段較長,肯定會影響擬合精度,不同時間長短的影響程度是多少,如何建立一套科學合理的精度評估系統,也是下一步研究的重點。
[1]劉念.最小二乘插值與擬合推估[J].測繪科學,2002,27(3):19-21,51.
[2]齊林,周麗曉.變換域自適應濾波算法的研究[J].鄭州大學學報(理學版),2007:39(1):61-66.
[3]黃賢源,隋立芬,范澎湃.幾種最優濾波方法的分析和比較[J].測繪工程,2007,16(3):35-39.
[4]王晶昕.樣條插值適定性與插值逼近問題研究[D].大連:大連理工大學,2004.
[5]何洪英,姚建剛,羅滇生.紅外圖像的自適應混合消噪方法[J].計算機工程與應用,2006(6):7-9.