鐵路路基關鍵參數長期監測方法與系統的研究
2014-08-15 01:40:22馮其波崔建英王連俊
測繪通報 2014年6期
關鍵詞:測量
楊 婧,馮其波,高 瞻,崔建英,王連俊
(1. 北京交通大學 理學院,北京 100044; 2. 北京交通大學 土木建筑工程學院,北京 100044)
一、引 言
路基質量的好壞直接影響著鐵路運輸的安全與效能。隨著我國高速、重載鐵路的快速發展,對路基質量提出了嚴格的施工工藝與技術要求。很多既有線路的路基難以承受大軸重、高速度的機車車輛,導致我國鐵路路基病害廣泛而嚴重。因此,對路基含水量和路基動態響應特性等路基關鍵參數的監測,已成為路基設計與維護的重要課題。目前鐵路路基參數監測方法主要有:車載雷達法[1-3]、波速法[4-5]、動力觸探法[6-7]、核子密度儀法[8-9]、落錘式彎沉儀法[3]等。這些方法針對特定工程環境、地質條件進行測量,得到特定的路基參數;大多數方法還依靠人工測量或記錄,測量效率低且不能實現自動、遠程監測;此外,在選擇不同儀器測量相應參數時,穩定性與成本難以兼顧,影響測量方法的廣泛使用。針對以上缺點與不足,研發了鐵路路基關鍵參數實時監測系統,該系統經實驗室驗證后以應用于大秦重載鐵路進行現場監測。
二、系統總體設計
研制的鐵路路基關鍵參數長期監測系統如圖1所示。系統由路基動應力與含水量自動測量子系統、路基動位移自動測量子系統、路基沉降自動測量子系統和數據自動采集與無線傳輸子系統組成,各子系統通過有線或無線傳輸方式接入網絡存儲器,網絡存儲器再通過DTU(data transfer unit)設備接入CDMA網絡。值控中心通過CDMA網絡對各子系統的現場設備進行設置,控制測量方式、獲取測量數據,實現對各監測點路基關鍵參數的長期遠程自動監測。
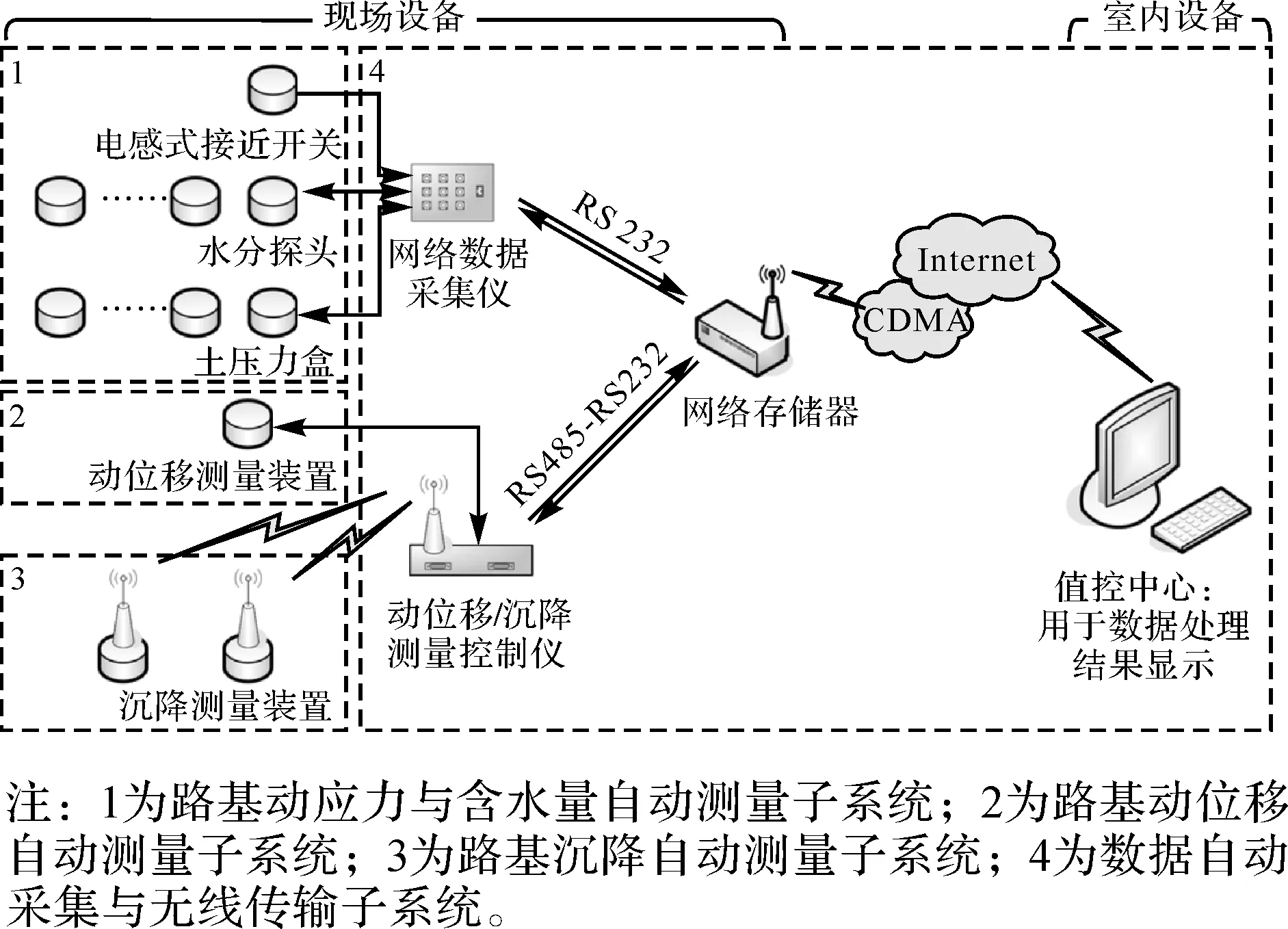
圖1 系統構成
對于路基動應力與含水量的測量,有較多成熟的動應力傳感器與水分傳感器。本文選用的ICP 8904壓電式動應力傳感器是基于敏感端的壓電材料的正效應來測量路基的動應力,選用的8909A水分傳感器是基于介電理論并運用頻域測量技術來測量土壤介質的體積含水量。
如圖2所示,為了方便測量控制與信號處理,兩種傳感器統一選用電壓輸出,與網絡數據采集器相連接,完成數據的采集、存儲;之后網絡數據采集器將原始數據上傳到網絡存儲器,由后者對原始數據進行簡單處理,并將結果通過基于CDMA網絡的DTU模塊上傳到遠端的值控中心。
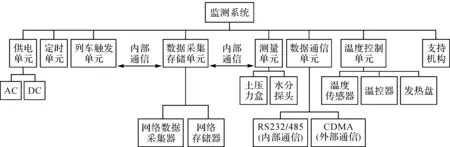
圖2 路基動應力與含水量子系統組成結構圖
三、表面沉降與動位移測量
1. 基于自標定的測量原理
設計的基于星點的表面沉降測量及路基動位移光學測量方法如圖3所示。
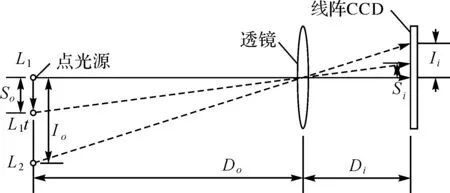
圖3 自標定路基動位移測量原理
被測處設測量樁,其上設置有兩個點光源L1、L2作為目標星點;在道砟外設置深6 m的基準樁,其上安裝測量裝置。該裝置主要包括成像透鏡、線陣CCD(charge-coupled device)及其控制與處理電路。未發生沉降或無列車經過時,間距為Io的兩個星點經過透鏡在CCD上所成的像的間距為Ii;產生沉降后或列車經過時,兩個星點發生相同距離的位移So,星點經過透鏡在CCD上所成的像也隨之發生相應的位移Si,但由于星點的間距Io未發生改變,兩者的像間距依然為Ii。Io已知,Ii和Si由CCD測得,根據成像關系可計算出星點位移
在不同的子系統中,So分別代表了被測點的表面沉降值、路基動位移值。通過該方法測量星點位移時,無需現場測量成像系統的物距,即星點到動位移測量裝置之間的距離Do,減少了由此帶來的誤差,提高了測量精度,實現了自行標定。
2. 光斑中心提取算法
利用線陣CCD進行位置測量,光斑中心提取是最為重要的環節,常用的提取算法有中心法[10]、質心法[11]、加權質心法[11]、曲線擬合法[12]等。綜合考慮精度、抗干擾性及計算時間,本文采取加權質心法進行光斑中心提取。
由于星點成像光斑僅覆蓋線陣CCD的部分區域,在提取光斑中心之前先確定光斑圖像特征區域,以減少參與計算的像素數量。本文采取動態閾值法確定特征區域,計算流程如圖4所示。讀取整個CCD的灰度最大值Gmax與最小值Gmin,取兩者均值作為動態閾值
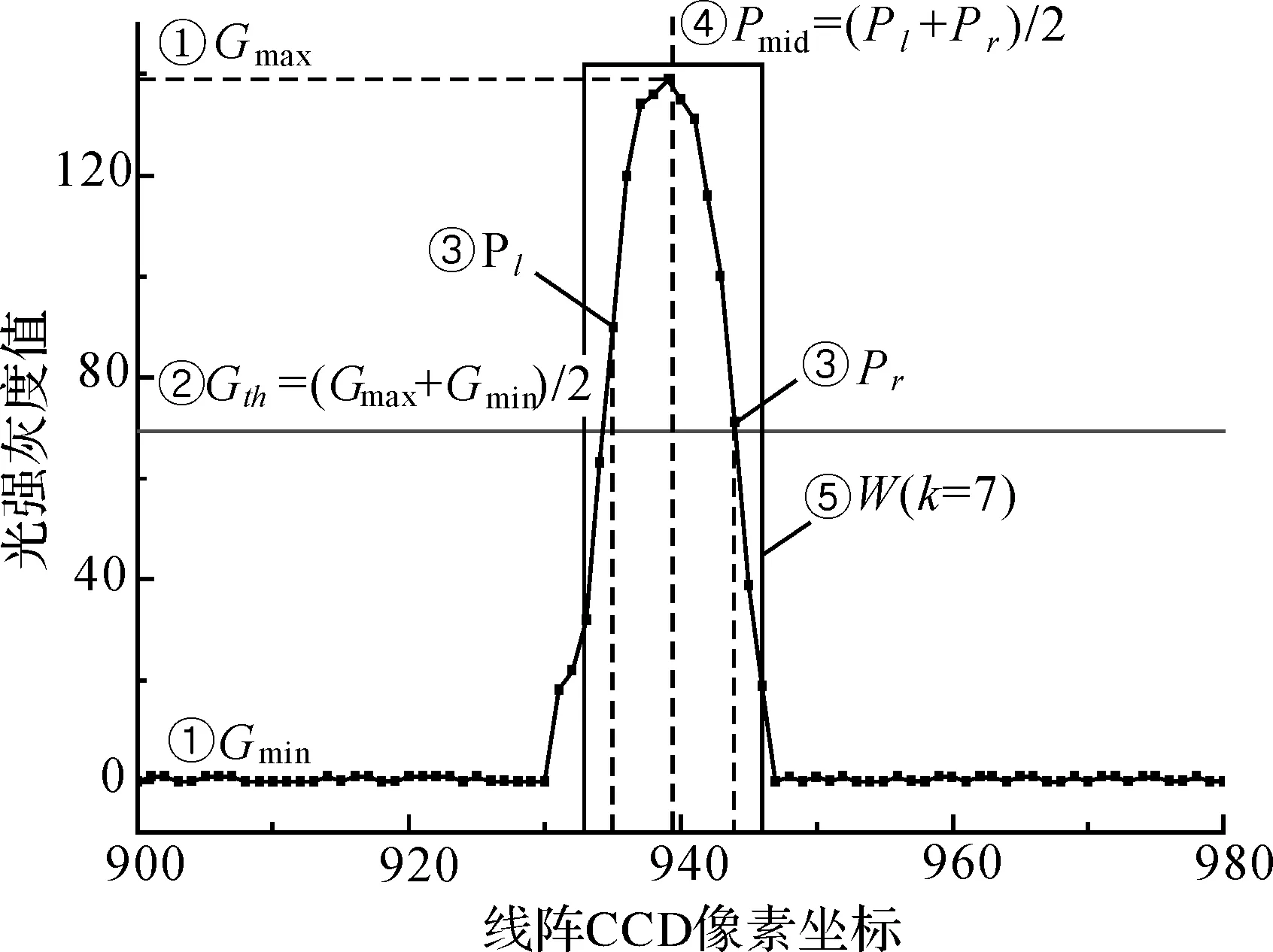
圖4 光斑特征區域選取

將灰度值大于閾值Gth的左、右邊緣像素坐標記為Pl、Pr,取兩者均值作為初始中心值
特征區域W可由下式定義
式中,k為特征區域半寬參數,根據光斑成像大小而定,一般取5~9。當Pmid屬于自然數N時,W為以Pmid為中心、寬2k+1個像素的區域;當Pmid不屬于自然數時,W為以Pmid-0.5、Pmid+0.5兩個像素為中心、寬2k+2個像素的區域。
特征區域W確定以后,由加權質心法計算光斑中心位置
(5)
式中,i為參與計算的像素的坐標;G(i)為像素i對應的灰度值。
3. 動位移采樣頻率
動位移是由列車經過對鋼軌施加的動荷載引起的連續的形變,CCD一次只能記錄某一瞬間的位移變換量,要使測量結果完整保留原始的連續形變信息,由采樣定理可知,必須讓CCD的采樣頻率大于連續形變最高頻率的2倍。由于轉向架通過時動位移變化最大,目前大秦線重載貨車相鄰車廂的兩個轉向架最小間距為2 m,最高運行速度為120 km/h,可以算得動位移的最大頻率為
fmax=vmax/smin=120(km/h )/ 2 m=16.67 Hz
(6)
因此,線陣CCD采樣頻率應大于33.34 Hz。實際中設定動位移測量裝置的采樣頻率為49.75 Hz,在保證原始信息不丟失的基礎上,為將來預留了一定的提速空間。
四、實驗室驗證及現場應用
1. 實驗室驗證
在實驗室內搭建實驗裝置,模擬路基動位移變形、路基沉降的情況,進行路基關鍵參數實時監測系統各子系統的性能測試(如圖5所示)。
(1) 路基動位移測量
如圖5(a)所示,將星點安裝在激振器上,由激振器的振動模擬動位移,測得振動圖形如圖6所示。可以看出,星點低頻振動時可描繪出實際振動狀態,高頻振動時能測出振動的周期,通過疊加方式能描繪出一個周期的振動狀態。
(2) 路基沉降測量
如圖5(c)所示,將星點安裝在與測量裝置相距40 m、豎直放置的電動位移臺上,位移臺上下移動,模擬路基表面沉降過程。依次進行了成像放大倍數標定實驗和穩定性誤差實驗,結果如圖7所示,非線性誤差為0.2 mm,穩定性誤差為0.38 mm。
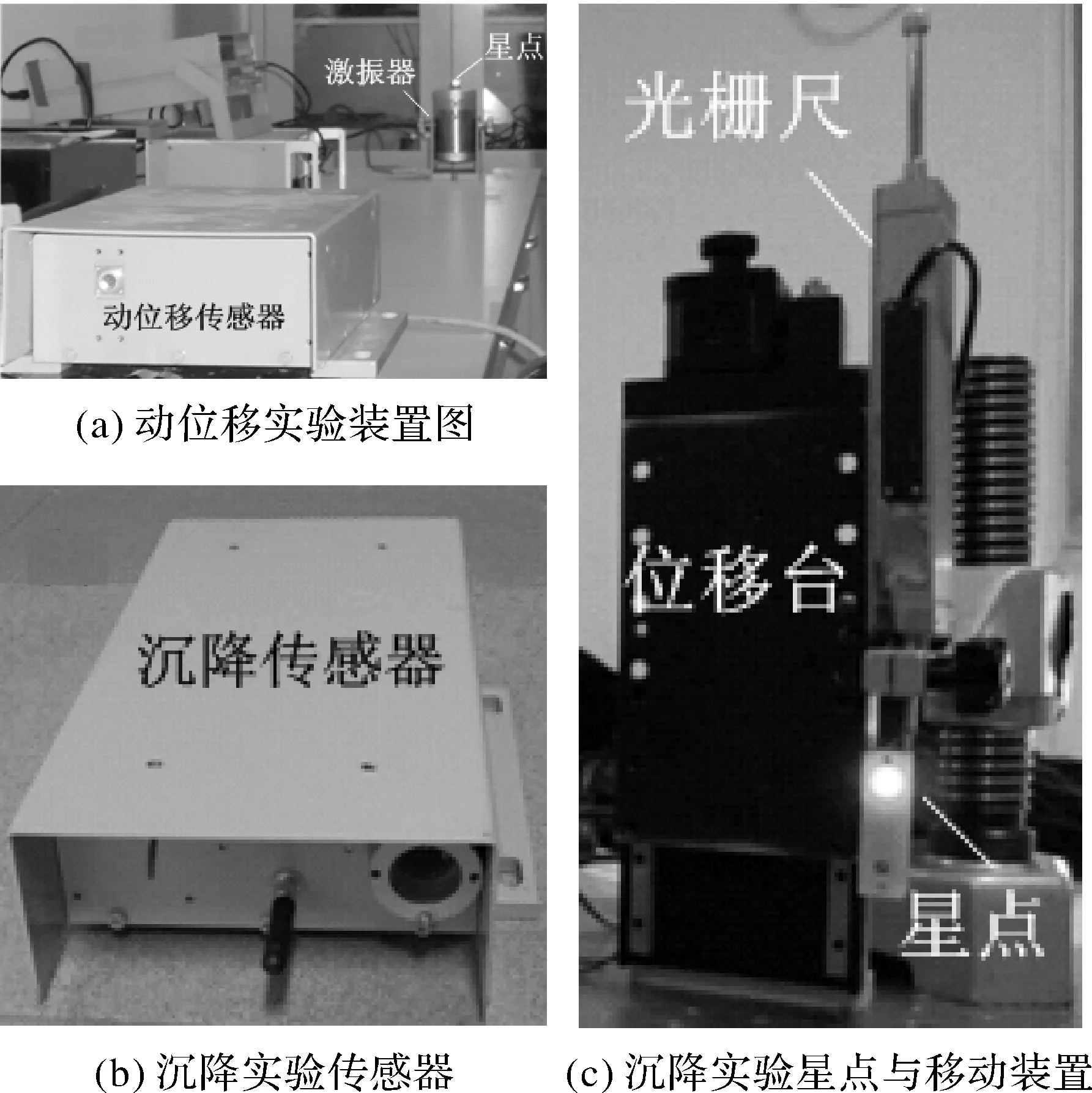
圖5 實驗裝置圖
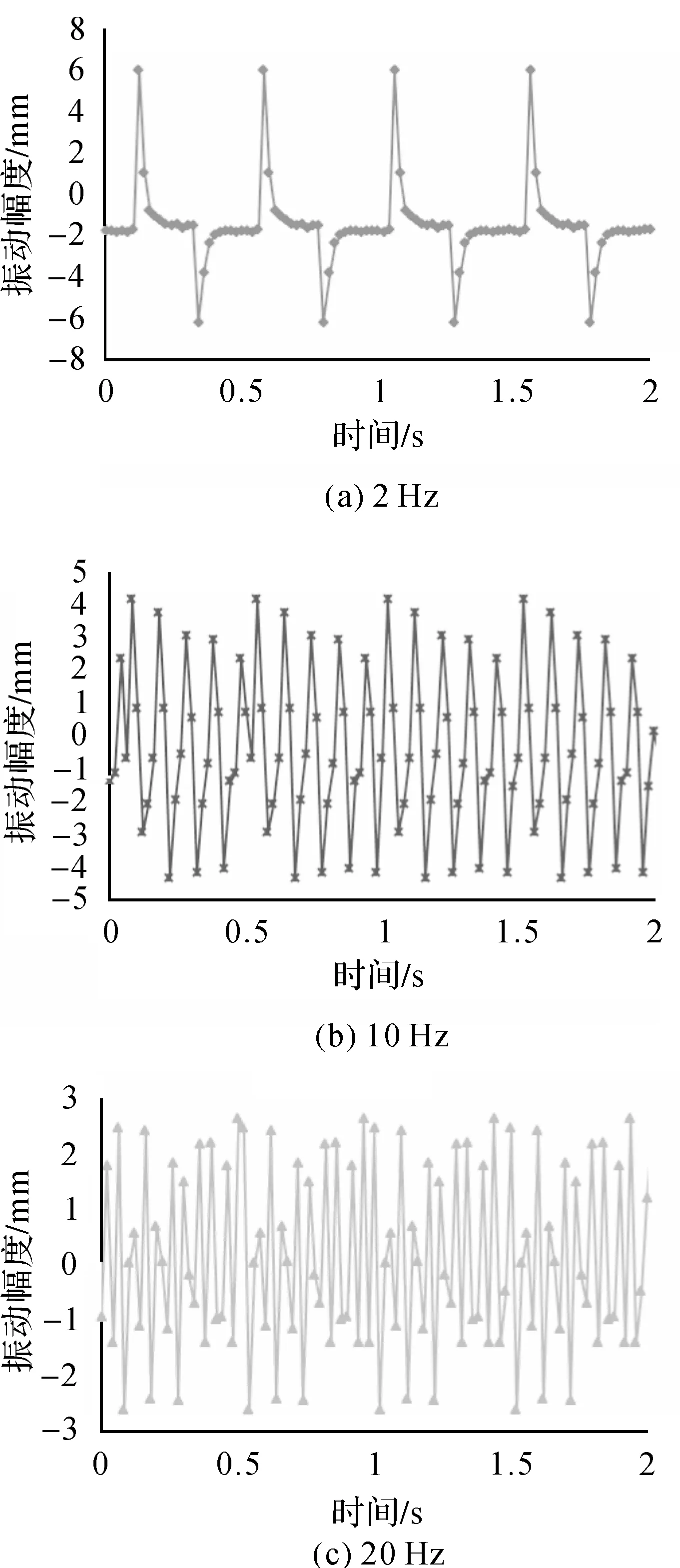
圖6 不同頻率的動位移測量結果
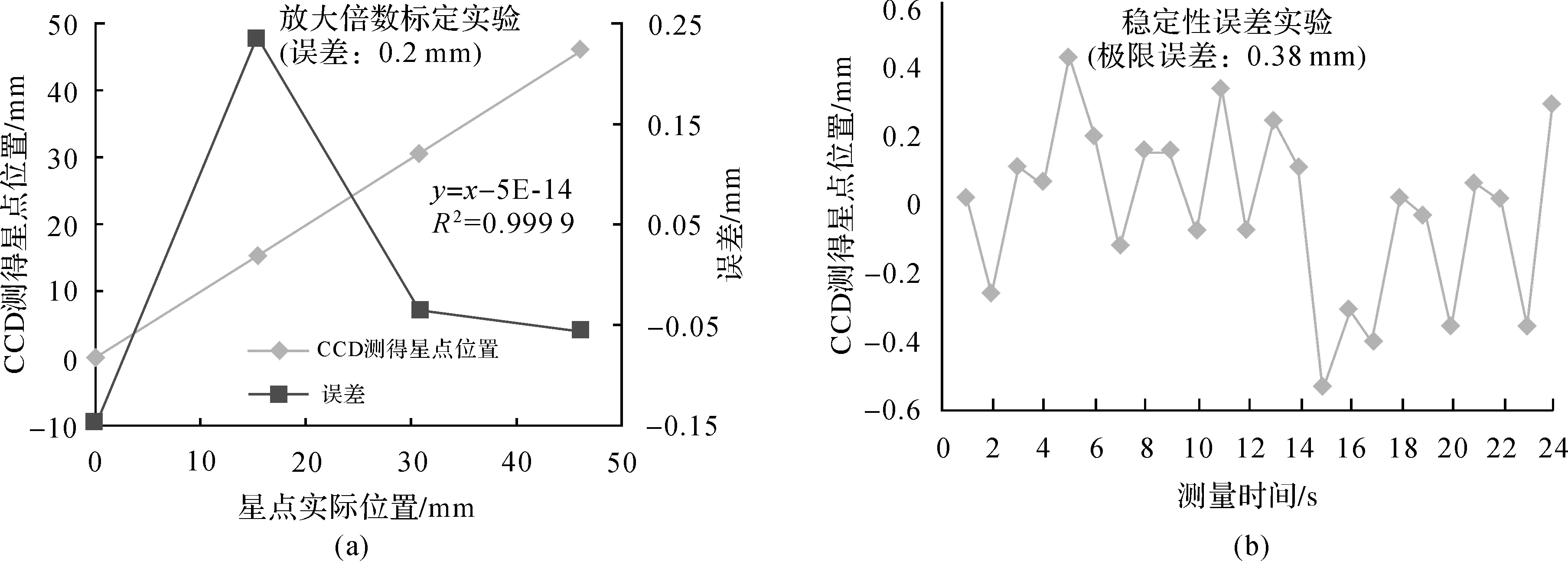
圖7 沉降模擬測量實驗結果
2. 現場應用
路基關鍵參數實時監測系統于2010年12月在大秦重載鐵路k13+700, k266+314, k266+414處安裝、調試和運行,其中斷面k13+700位于山西省大同市南郊區御河大橋重載線路一側;斷面k266+314, k266+414位于北京市懷柔區茶塢附近。以k266+314斷面為例,現場傳感器與監測裝置布置情況見表1、圖8,隨后的監測結果如圖9所示。
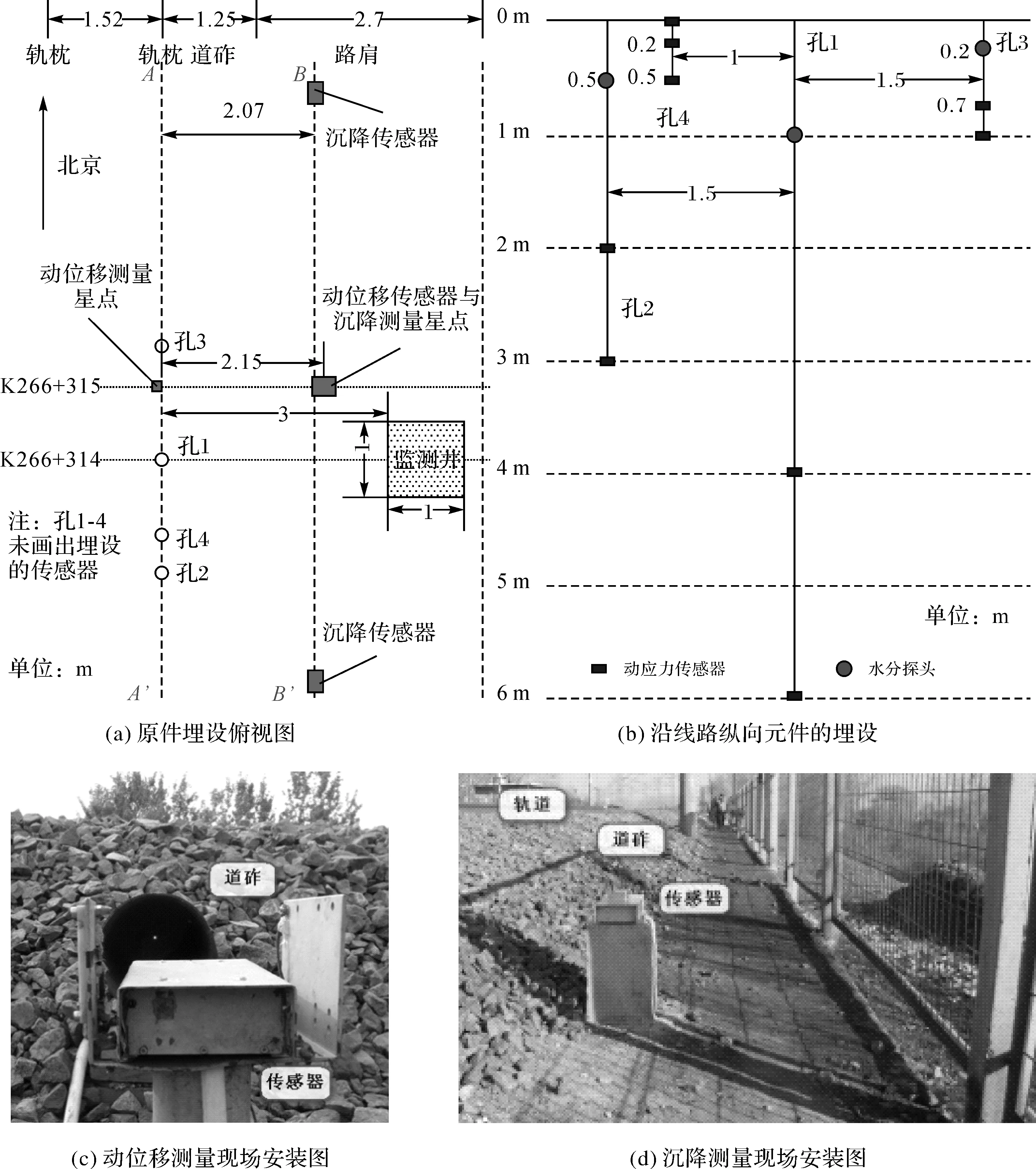
圖8 k266+314斷面測點布置圖
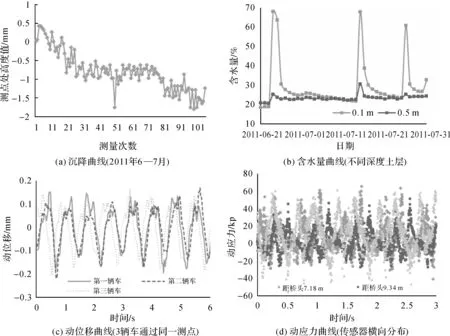
圖9 路基關鍵參數監測結果
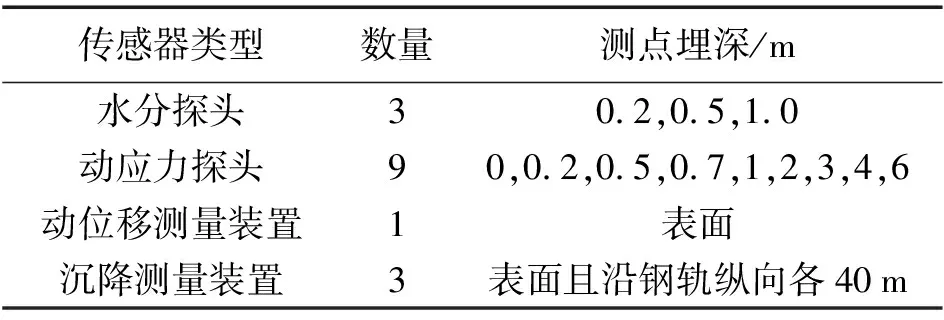
表1 k266+314斷面傳感器及測量裝置布置一覽表
由沉降曲線可以看出,在兩個月內被測點處有約1.5 mm的沉降,在準許的范圍以內;由動應力與動位移的時程曲線圖可以看出:列車經過時產生的動應力和動位移都表現出明顯的周期性,其中波谷出的“V”型曲線表示一節車廂前后兩個轉向架通過被測斷面,波峰處的“M”型曲線表示兩節車廂相鄰兩個轉向架通過被測斷面。由含水量曲線可以看出:2011年6月24日、7月15日及7月26日3天有大雨的時候,含水量都有一個明顯的增加。
五、結束語
本文研發的路基關鍵參數監測系統可以實現對鐵路路基沉降、含水量、動位移和動應力等參數測量,通過無線通信方式,實現對路基相關參數的遠程長期自動監測。
參考文獻:
[1] 郭秀軍,韓宇,孟慶生,等. 鐵路路基病害無損檢測車載探地雷達系統研制及應用[J]. 中國鐵道科學, 2006, 27(5): 139-144.
[2] 廖立堅,楊新安,杜攀峰,等.鐵路路基雷達探測數據的處理[J].中國鐵道科學,2008,29(3) :18-23.
[3] 王復明,蔡迎春,鐘燕輝,等. 落錘式彎沉儀及探地雷達在道路施工過程中的應用技術:中國, 200510017676.2[P]. 2006-12-20.
[4] 李維,祝磊,韓百成. 瞬態瑞雷波法在地基固結效果檢測中的應用[J]. 路基工程, 2008(3): 136-138.
[5] 張志耕. 瑞雷面波法在路基質量檢測中的應用[J]. 水文地質工程地質,2006(5):117-118.
[6] 郭楊勝. 綜合檢測技術在鐵路路基病害檢測中的應用[J]. 土工基礎, 2012, 26(3): 112-114.
[7] 張濤,左德元. 動力觸探在路基壓實度檢測中的應用[J]. 路基工程, 2006(6): 140-141.
[8] 王志祥. 公路路基評價的關鍵技術問題研究[J]. 貴州大學學報:自然科學版, 2012, 29(3): 97-99.
[9] 馬偉斌,姚建平,蔡德鉤,等. 直接插入式深層核子密度儀探頭的研制及其應用[J]. 鐵道建筑, 2008(1): 55-57.
[10] 吳慶陽,蘇顯渝,李景鎮,等. 一種新的線結構光光帶中心提取算法[J]. 四川大學學報:工程科學版, 2007, 39(4): 151-155.
[11] 郭金運,宋來勇,劉新,等. 數字天頂攝像儀中CCD星像亞像素定位的改進二維矩方法[J]. 測繪學報,2011,40(6): 679-683.
[12] 朱鶴年. 一種用線陣CCD測量光束中心位置的方法:中國, 200510012066.3[P]. 2005-12-21.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00