城市機(jī)載LiDAR測(cè)圖平臺(tái)研究與實(shí)現(xiàn)
2014-08-15 03:08:00王磊
測(cè)繪通報(bào) 2014年4期
王 磊
(廣州市城市規(guī)劃勘測(cè)設(shè)計(jì)研究院,廣東 廣州 510060)
一、引 言
隨著廣州市新型城市化發(fā)展實(shí)現(xiàn)大跨越、國(guó)家中心城市功能全面增強(qiáng),以及城鄉(xiāng)一體化建設(shè)飛速發(fā)展,城市規(guī)劃特別是郊區(qū)與鄉(xiāng)村的規(guī)劃凸顯重要和緊迫,對(duì)地理數(shù)據(jù)的快速獲取和現(xiàn)勢(shì)性要求也越來越高。目前,采集大比例尺數(shù)字線劃圖的技術(shù)手段主要依靠大量的外業(yè)數(shù)據(jù)采集和人工分析處理工作,已明顯無法滿足大面積、快速、高精度產(chǎn)品的生產(chǎn)需求。激光雷達(dá)(light detection and ranging,LiDAR)技術(shù)集激光測(cè)距技術(shù)、計(jì)算機(jī)技術(shù)、慣性測(cè)量單元(IMU)、差分定位技術(shù)(DGPS)于一體,其在三維空間信息的實(shí)時(shí)獲取方面產(chǎn)生了重大突破,為獲取高時(shí)空分辨率地球空間信息提供了一種全新的技術(shù)手段,使傳統(tǒng)的人工單點(diǎn)數(shù)據(jù)獲取變?yōu)檫B續(xù)自動(dòng)數(shù)據(jù)獲取,使數(shù)據(jù)處理的自動(dòng)化、智能化成為可能。
目前對(duì)LiDAR 數(shù)據(jù)處理的大部分研究集中于數(shù)據(jù)的濾波和分類,而針對(duì)不同地形條件的自適應(yīng)性、自動(dòng)化算法仍處于初步探討階段[1]。本文以廣州市從化測(cè)區(qū)機(jī)載LiDAR 系統(tǒng)1∶2000、1∶5000地形成圖為例,研制機(jī)載LiDAR測(cè)圖平臺(tái),并在從化測(cè)區(qū)1985 km2的1∶2000、1∶5000地形圖測(cè)制中得到實(shí)際應(yīng)用。
二、機(jī)載LiDAR獲取后數(shù)據(jù)特征
LiDAR測(cè)圖系統(tǒng)所包括的數(shù)據(jù)主要有數(shù)字正射影像(DOM)、數(shù)字表面模型(DSM)、數(shù)字高程模型(DEM)、分類的激光點(diǎn)云(point cloud)。
1. 數(shù)字正射影像
數(shù)據(jù)主要特征如下:
1) 地面分辨率:1∶2000的為0.2 m,1∶5000的為0.5 m;數(shù)據(jù)格式為*.tif;分幅尺寸:1∶2000 的為1000 m×800 m(四周需外擴(kuò)20m重疊區(qū)域),1∶5000的為2000 m×2000 m(四周需外擴(kuò)100 m重疊區(qū)域);影像定位,DOM數(shù)據(jù)起始點(diǎn)為左上角像元中心點(diǎn)對(duì)應(yīng)的廣州平面坐標(biāo)。
2) 數(shù)據(jù)的柵格坐標(biāo)位于像元中心點(diǎn),影像值是每一個(gè)柵格中心代表的值;影像色彩模式為24位(比特);影像無噪聲、污點(diǎn)、劃痕。
2. 地面表面模型
數(shù)據(jù)主要特征如下:地面分辨率為1 m;數(shù)據(jù)格式為*.bil;分幅尺寸為1000 m×800 m;數(shù)據(jù)存儲(chǔ),應(yīng)由起始格網(wǎng)點(diǎn)起,按從西向東,由北向南的順序排列;空白區(qū)域在所獲取高程數(shù)據(jù)源出現(xiàn)局部中斷的情況下使用,位于空白區(qū)域的格網(wǎng)應(yīng)賦予高程值-9999(對(duì)空白區(qū)的處理有記錄)。
3. 數(shù)字地面模型
數(shù)據(jù)主要特征如下:地面分辨率,1∶2000的為1 m,1∶5000的為2.5 m;數(shù)據(jù)格式為*.bil;分幅尺寸,1∶2000的為1000 m×800 m,1∶5000的為2000 m×2000 m;數(shù)據(jù)存儲(chǔ),應(yīng)由起始格網(wǎng)點(diǎn)起,按從西向東、由北向南的順序排列;空白區(qū)域在所獲取高程數(shù)據(jù)源出現(xiàn)局部中斷的情況下使用,位于空白區(qū)域的格網(wǎng)應(yīng)賦予高程值-9999(對(duì)空白區(qū)的處理有記錄)。
4. 點(diǎn)云數(shù)據(jù)
點(diǎn)云是在同一空間參考系下表達(dá)目標(biāo)空間分布和目標(biāo)表面光譜特性的海量點(diǎn)集合。激光雷達(dá)系統(tǒng)掃描獲取的數(shù)據(jù),從嚴(yán)格意義上講,包括位置、方位/角度、距離、時(shí)間、強(qiáng)度等各種數(shù)據(jù)。但實(shí)際應(yīng)用中,人們接觸和使用的是與具體時(shí)間及發(fā)射信號(hào)波長(zhǎng)一一對(duì)應(yīng)的點(diǎn)坐標(biāo)及強(qiáng)度等。與城市LiDAR測(cè)圖平臺(tái)影像數(shù)據(jù)相比,點(diǎn)云數(shù)據(jù)在內(nèi)容、形式等方面具有很多自身的特點(diǎn)。數(shù)據(jù)主要特征如下:點(diǎn)密度,1∶2000的為1~4個(gè)/m2,1∶5000的為1/4~1個(gè)/m2;數(shù)據(jù)格式為*.coo(包含x、y、z、顏色RGB、反射強(qiáng)度F等信息)。
三、城市LiDAR測(cè)圖平臺(tái)主要功能
城市LiDAR測(cè)圖平臺(tái)基于筆者所在單位原有1∶2000、1∶5000成圖模板與數(shù)據(jù)標(biāo)準(zhǔn),并采用功能模塊化的方式開發(fā),快速搭建可供實(shí)際生產(chǎn)的應(yīng)用系統(tǒng),大大縮短了開發(fā)交互式測(cè)圖軟件的開發(fā)周期和作業(yè)員的培訓(xùn)周期,同時(shí)保證了軟件系統(tǒng)的質(zhì)量。城市LiDAR測(cè)圖平臺(tái)主要功能見表1。
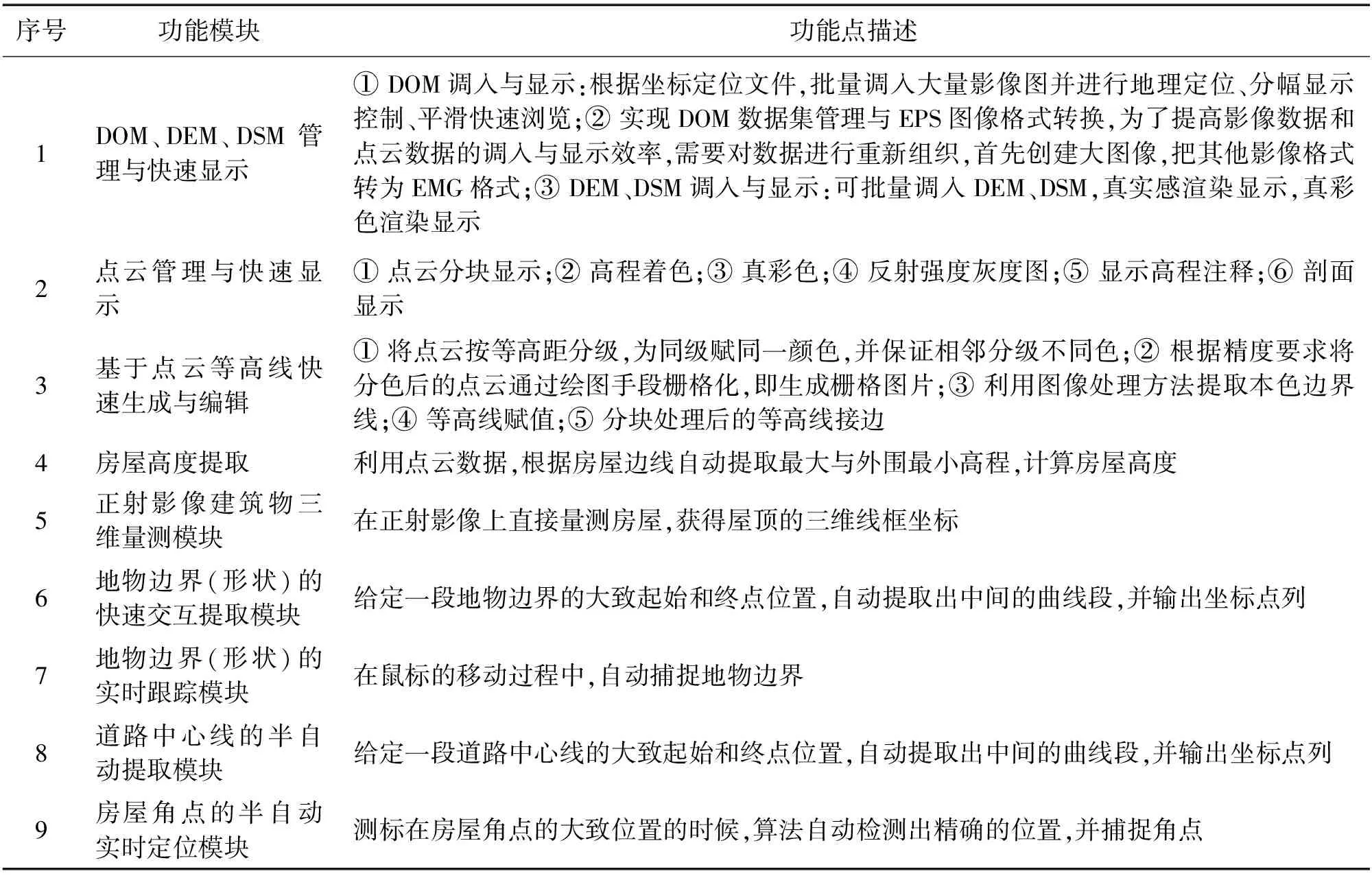
表1 城市LiDAR測(cè)圖平臺(tái)主要功能
四、關(guān)鍵技術(shù)與實(shí)現(xiàn)
1. 海量點(diǎn)云管理與快速顯示
點(diǎn)云數(shù)據(jù)的特點(diǎn)之一就是數(shù)據(jù)量非常大,一個(gè)普通的工程文件中就可多達(dá)數(shù)億點(diǎn)。在點(diǎn)云數(shù)據(jù)描述與顯示環(huán)節(jié)進(jìn)行優(yōu)化,采用無損壓縮技術(shù)、虛擬緩存技術(shù)、動(dòng)態(tài)篩選技術(shù),實(shí)現(xiàn)海量點(diǎn)云的高效加載與顯示,解決了超大點(diǎn)云數(shù)據(jù)的存儲(chǔ)與顯示效率問題,如圖1所示。
1) 無損壓縮技術(shù):在保證三維坐標(biāo)數(shù)據(jù)精度的前提下,將用常規(guī)方法描述的點(diǎn)云數(shù)據(jù)壓縮掉80%,使得每百兆存儲(chǔ)空間點(diǎn)云高達(dá)千萬點(diǎn),有效地解決了海量點(diǎn)云的存儲(chǔ)問題。
2) 虛擬緩存技術(shù):將其分塊保存在以本地硬盤為載體建立的緩存中,顯示時(shí)從緩存中動(dòng)態(tài)讀取,用后釋放。虛擬緩存與內(nèi)存兼容性好,讀寫速度快,在海量點(diǎn)云數(shù)據(jù)高速顯示過程中起到了關(guān)鍵作用。
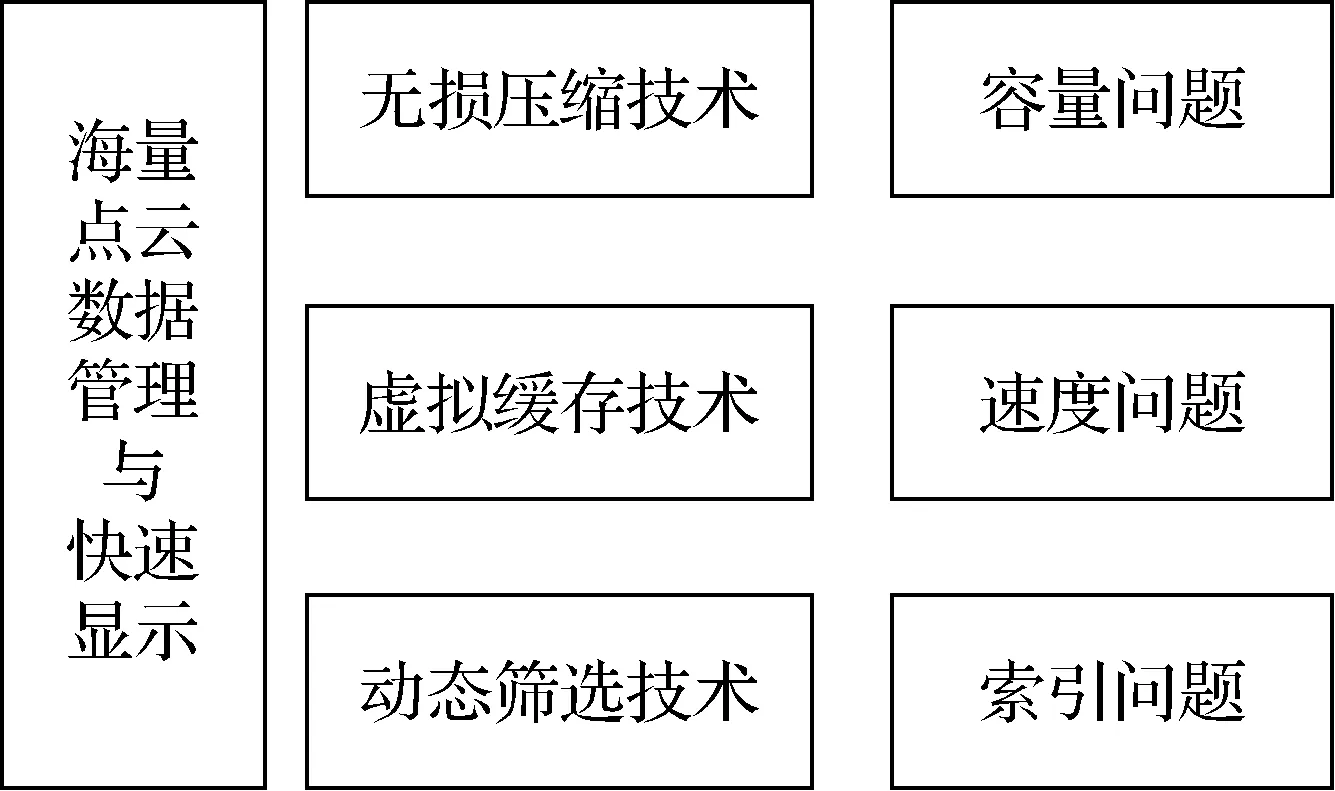
圖1 海量點(diǎn)云數(shù)據(jù)管理與快速顯示機(jī)制
3) 動(dòng)態(tài)篩選技術(shù):點(diǎn)云數(shù)據(jù)在同一窗口超過一定數(shù)量后(如100萬點(diǎn)),其細(xì)節(jié)是顯示設(shè)備無法表現(xiàn)或人眼分辨不出的,系統(tǒng)根據(jù)這一特點(diǎn)對(duì)同一窗口超大數(shù)據(jù)量顯示時(shí)刻動(dòng)態(tài)篩選,即在限定數(shù)量閥值內(nèi)按空間平均分配的原則抽取一定的比例數(shù)據(jù),避免數(shù)以億計(jì)的點(diǎn)同時(shí)顯示現(xiàn)象,從而提高顯示性能。
2. 基于點(diǎn)云圖像柵格化的等高線快速生成
基于點(diǎn)云(地面)提取等高線是工程實(shí)踐中的主要需求之一,但由于點(diǎn)云數(shù)據(jù)量大,使得通過點(diǎn)云數(shù)據(jù)構(gòu)建三角網(wǎng)、再基于三角網(wǎng)追蹤等高線這種通常應(yīng)用于常規(guī)矢量的處理方法在處理點(diǎn)云的過程中效果不理想或根本無法使用。本系統(tǒng)采用柵格的方法成功地解決了海量點(diǎn)云等高線自動(dòng)生成這一生產(chǎn)難題,如圖2所示。

圖2 等高線快速生成機(jī)制
基本原理如下:將點(diǎn)云按等高距分級(jí),并為同級(jí)賦同一顏色,保證相鄰分級(jí)不同色;根據(jù)精度要求將分色后的點(diǎn)云通過繪圖手段柵格化,即生成柵格圖片;利用圖像處理方法提取本色邊界線;等高線賦值;分塊處理后的等高線接邊。由于圖像處理成熟,實(shí)踐中應(yīng)用廣泛,EPS通過點(diǎn)云柵格化方法,成功地將基于點(diǎn)云生成等高線問題轉(zhuǎn)換為基于圖像提取色塊分界線問題;又由于點(diǎn)云柵格化過程中,絕大多數(shù)噪聲已經(jīng)被過濾掉,從而保證了等高線光滑、柔順,如圖3、圖4所示。

圖3 等高線快速生成
3. 基于正射影像建筑物三維量測(cè)
基于正射影像和密集三維點(diǎn)云,同步生成與影像對(duì)應(yīng)的數(shù)字高程模型的方法,讓二維影像上點(diǎn)的位置與該模型的三維坐標(biāo)一一對(duì)應(yīng),從而精確獲得對(duì)應(yīng)點(diǎn)位的真實(shí)高程值和平面坐標(biāo)。采用本方法無需觀察立體影像對(duì),在正射影像上就可以進(jìn)行三維數(shù)字線畫圖和地物測(cè)繪。其原理與實(shí)施流程分別如圖5、圖6所示。

圖4 等高線快速生成

圖5 技術(shù)原理示意圖
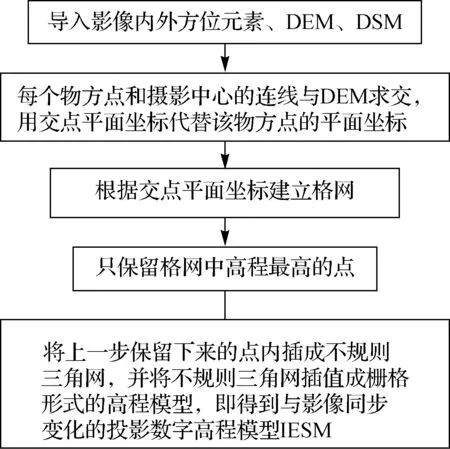
圖6 技術(shù)實(shí)施的流程圖
4. 基于正射影像地物自動(dòng)與半自動(dòng)提取
給定影像上線狀目標(biāo)的初值,可精確提取線狀目標(biāo)的形狀。融合現(xiàn)有線劃圖測(cè)繪操作方式、影像上線狀地物特征實(shí)時(shí)自動(dòng)捕捉和提取、進(jìn)行快速線劃圖測(cè)繪的技術(shù)實(shí)現(xiàn)了影像上線狀目標(biāo)人工引導(dǎo)下的半自動(dòng)快速提取,提高了繪圖精度與作業(yè)效率,如圖7、圖8所示。
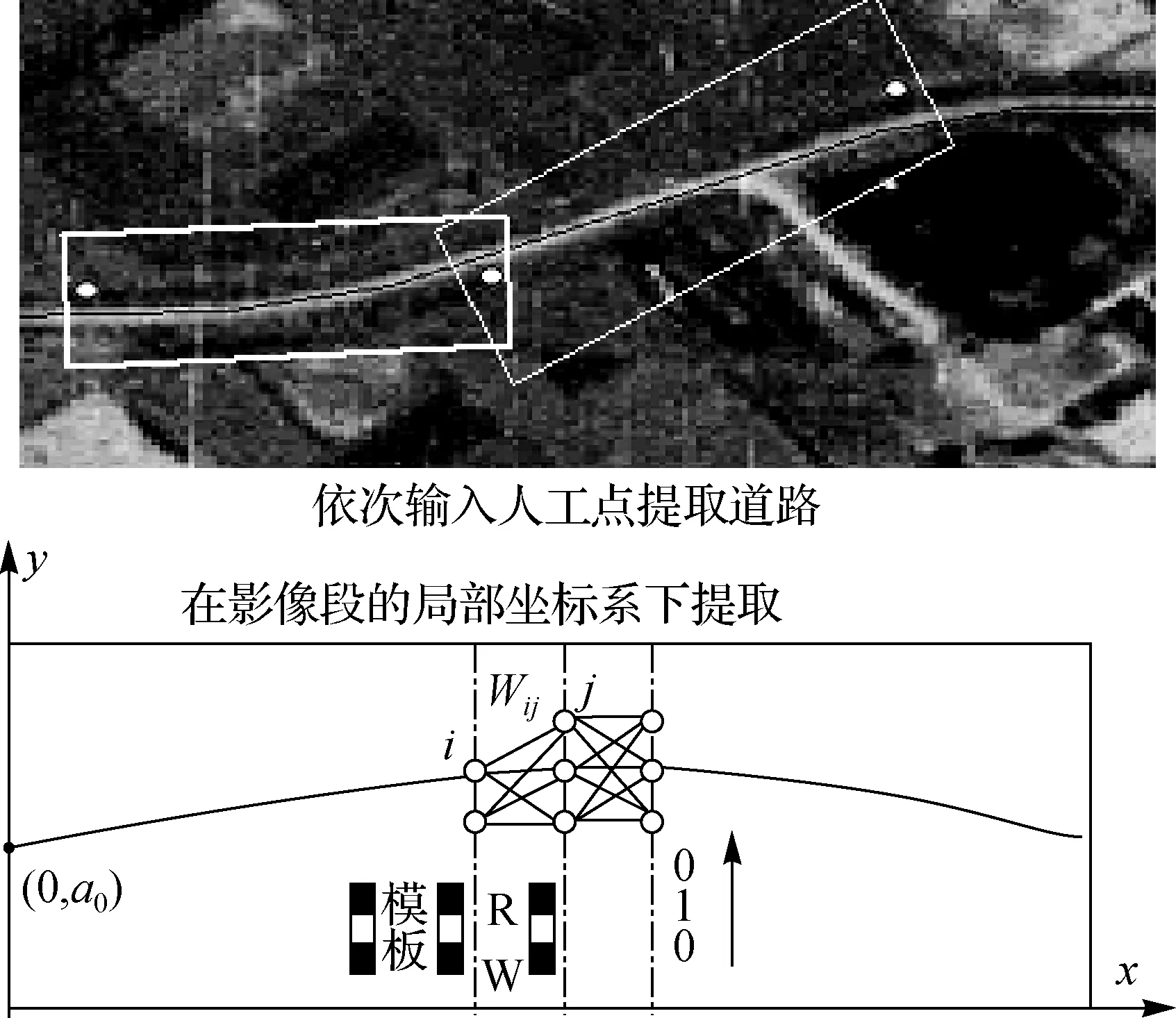
圖7 基于二值模板匹配與優(yōu)化計(jì)算的方法
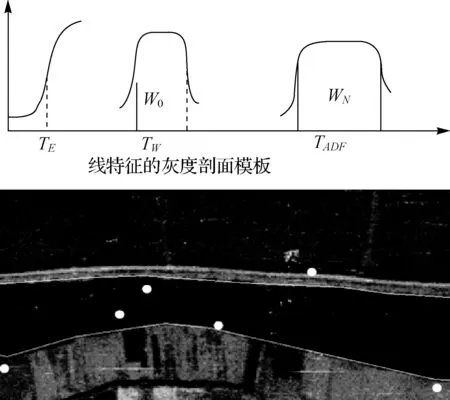
圖8 基于自適應(yīng)最小二乘模板匹配提取各段連續(xù)的拋物線
五、應(yīng)用情況
基于城市機(jī)載LiDAR測(cè)圖平臺(tái),本文完成了廣州市從化1985 km2全域1∶5000地形圖測(cè)圖工作,開展了100 km21∶2000地形圖測(cè)量試驗(yàn)與三維白模建立工作,在成果精度、圖面表達(dá)等方面均取得了預(yù)期成果,實(shí)現(xiàn)了城市空間基礎(chǔ)數(shù)據(jù)的快速獲取、快速生產(chǎn)目標(biāo),實(shí)現(xiàn)了當(dāng)年航測(cè)、當(dāng)年生產(chǎn)目標(biāo)。
整體上,本測(cè)圖平臺(tái)具有以下特點(diǎn):
1) 高效便捷的數(shù)據(jù)組織管理:對(duì)海量點(diǎn)云、正射影像及原支持的地理信息數(shù)據(jù)批量快速加載及任意卸載,且多種數(shù)據(jù)融合于同一圖面,省去了使用者頻繁切換的麻煩,縮減了加載數(shù)據(jù)的等待時(shí)間,是提高作業(yè)效率的重要環(huán)節(jié)。
2) 方便、合理的數(shù)據(jù)顯示控制:只需更改復(fù)選框內(nèi)選擇狀態(tài)即能控制點(diǎn)云、DOM、地形圖數(shù)據(jù)的隱藏顯示,且對(duì)于點(diǎn)云可以按照高程變化設(shè)色顯示、框選區(qū)域顯示、剖面圖顯示等,有利于制圖員對(duì)地形變化更好地把握。
3) 快速的等高線生成:該軟件能大面積由點(diǎn)云快速生成等高線,根據(jù)筆者使用其他軟件的經(jīng)驗(yàn),該系統(tǒng)在等高線的生成方面具有操作簡(jiǎn)單、占用計(jì)算資源少、速度快、圖面美觀等優(yōu)點(diǎn)。
4) 摒棄了立體測(cè)圖的束縛:目前流行的數(shù)字?jǐn)z影測(cè)圖平臺(tái)需要有經(jīng)驗(yàn)的航攝測(cè)圖員采用立體相對(duì)方式測(cè)圖,該軟件集成了建筑物投影差自動(dòng)改正功能,使得地形圖的測(cè)制可以在普通計(jì)算機(jī)上進(jìn)行,而且操作簡(jiǎn)單,易于學(xué)會(huì)。
六、結(jié)束語
LiDAR技術(shù)是利用返回的激光脈沖獲取探測(cè)目標(biāo)高分辨率的距離、坡度、粗糙度等信息,其能夠全天時(shí)、全天候地獲取地面的高密度三維數(shù)據(jù),是建立數(shù)字表面模型、數(shù)字城市模型等相關(guān)領(lǐng)域的新興高新技術(shù)[2]。城市機(jī)載LiDAR測(cè)圖平臺(tái)作為“城市LiDAR生產(chǎn)技術(shù)體系研究與應(yīng)用”課題的一部分,完善了筆者所在單位基礎(chǔ)地理數(shù)據(jù)快速生產(chǎn)技術(shù)體系,不僅保證了1∶500—1∶5000數(shù)據(jù)生產(chǎn)標(biāo)準(zhǔn)的一致性,而且按照信息化測(cè)繪要求,形成了機(jī)載LiDAR數(shù)據(jù)生產(chǎn)、質(zhì)量控制、成圖輸出、數(shù)據(jù)入庫(kù)的一體化作業(yè)流程,探索了一個(gè)面向?qū)I(yè)服務(wù)的快速測(cè)圖技術(shù)路線,建立了LiDAR測(cè)圖快速生產(chǎn)技術(shù)體系。
目前,國(guó)內(nèi)機(jī)載LiDAR技術(shù)研究主要集中在前期的數(shù)據(jù)處理方面,而對(duì)于后期制圖方面研究較少,城市機(jī)載LiDAR測(cè)圖平臺(tái)的研發(fā)成功,給城市測(cè)繪部門快速獲取空間基礎(chǔ)數(shù)據(jù)提供了一種思路,具有借鑒意義。
參考文獻(xiàn):
[1] 張小紅.機(jī)載激光雷達(dá)測(cè)量技術(shù)理論與方法[M].武漢:武漢大學(xué)出版社, 2007.
[2] 劉春.激光三維遙感的數(shù)據(jù)處理與特征提取[M].北京:科學(xué)出版社, 2010.
[3] 徐祖艦,王滋政,陽(yáng)鋒.機(jī)載激光雷達(dá)測(cè)量技術(shù)及工程應(yīng)用實(shí)踐[M].武漢: 武漢大學(xué)出版社, 2009.
[4] 王磊.面向城市規(guī)劃的空間數(shù)據(jù)庫(kù)動(dòng)態(tài)更新模型研究[J].測(cè)繪科學(xué),2009,34(6):215-217.
[5] 王磊,代培林. 面向規(guī)劃的MGE數(shù)據(jù)整理工作內(nèi)容與方法研究[J].測(cè)繪通報(bào),2010(6):54-56.