機載LiDAR點云數據誤差分析
2014-08-16 03:15:40熊愛武楊蒙蒙
測繪通報 2014年3期
關鍵詞:系統
熊愛武,楊蒙蒙
(1. 廣州市歐科地理信息技術服務有限公司,廣東 廣州 510663; 2. 北京四維遠見信息技術有限公司,北京 100070)
一、引 言
LiDAR系統是一種集激光掃描儀、全球導航衛星系統(GNSS)、慣性導航系統(INS) 和高分辨率數碼相機于一體的主動式遙感系統。其中,激光掃描儀用于獲取從激光發射(接收)參考點到探測目標的距離、掃描角和回波強度等數據,GNSS與INS組合導航可獲得高精度的三維位置和姿態數據,高分辨率數碼相機用于獲取地物光譜、紋理信息。機載LiDAR系統具有高效快速、點云密度高、數據精度高、受天氣影響程度小、成果產品豐富等優點,可快速獲取數字表面模型(DSM),生成高分辨率數字高程模型(DEM) 和高精度正射影像圖(DOM)。它不僅在城市三維建模、地形測繪等領域有著廣泛的發展前景,而且在電力行業、生態系統研究、環境監測等方面有著很大發展空間[1-3]。
由于LiDAR系統是一個多傳感器集成系統,其各個傳感器的誤差影響會導致所得到的激光腳點坐標與真實值存在一定誤差。目前已有不少學者對LiDAR系統誤差進行了分析,有些學者著重分析機載激光掃描測距誤差分析[3],有些學者分析了誤差對定位精度的影響[4],還有些學者針對某幾種誤差進行分析[5]。系統誤差分析和處理對于后續的數據處理和應用具有關鍵性的影響。
二、機載LiDAR系統工作原理
機載LiDAR系統是基于邊角測量原理的主動式遙感系統,它利用激光測量激光發射(接收)參考點到被測目標點之間的距離和相應的指向角,利用POS(GNSS和IMU)獲取測量平臺的位置和姿態,通過距離、角度、位置、姿態數據計算被測目標點的坐標,具體數據模型為[1,3,6]

(1)
(2)

式(2)為在不同的基準間轉換的數學模型,可以根據需要進行高斯投影或UTM投影計算。式中,下標r表示某一地心坐標系;T1、T2、T3表示兩坐標系間的偏移量;D、R1、R2、R3表示由兩個參考坐標系間三個定向參數組成的旋轉矩陣的行列值。
三、機載LiDAR系統誤差分析
根據上述模型,機載LiDAR系統的誤差主要包括定位誤差、GNSS/IMU組合系統誤差、激光測距誤差、激光測角誤差、系統集成安置誤差、時間同步誤差、坐標轉換誤差、數據內插誤差。
1. 定位誤差
在機載LiDAR系統中,由于飛行平臺與傳感器的位置信息都是由GNSS數據確定的,因此影響機載LiDAR系統定位精度最主要的誤差源于GNSS動態定位誤差。機載LiDAR系統使用動態差分技術進行定位,而影響GNSS定位精度的主要誤差源于GNSS衛星、衛星信號傳播和地面接收設備。其中具體誤差主要包括衛星星歷誤差、鐘誤差、相對論效應、多路徑效應、天線相位中心變化、整周模糊度等。通過不同測站、不同歷元、不同GNSS衛星的載波相位觀測值進行差分,可以消除星鐘誤差、星歷誤差、接收機鐘差和整周模糊度。用卡爾曼濾波估計周跳,采用GNSS偽距觀測值與載波相位觀測值進行組合解算,可以消除電離層的影響[4,7]。
2. GNSS/IMU組合姿態誤差[7]
GNSS/IMU組合姿態誤差主要是由陀螺儀和加速度計的誤差引起的,主要包括慣性系統靜態漂移誤差、初始對準誤差、動態跟蹤誤差等。靜態漂移誤差主要是由陀螺儀的漂移造成。在初始化對準的過程中,初始化對準結果所產生的導航坐標系偏離實際地理坐標系的差值即為初始化對準誤差,初始化對準誤差產生原因有兩個:陀螺零偏和加速度計零偏。初始化對準精度取決于水平加速度計及東向陀螺,從數據處理角度看,初始化對準精度還取決于初始化對準時間。動態跟蹤誤差實際上就是INS誤差的傳播,在工作過程中,各種誤差不斷地積累而導致。
(1) GNSS/IMU系統漂移誤差
陀螺本身所固有的隨機誤差為漂移誤差

(3)
一般設定陀螺誤差漂移模型為
ε=εb+εr+εg
(4)

由于陀螺儀的漂移誤差隨著時間不斷積累,可以采用多項式模型來擬合漂移誤差,利用姿態角的近似計算可知INS獲取姿態角誤差模型為

(5)
式中,ψt為t時刻的姿態;ψ0為初始姿態角;a、b、c、d為模型參數值。
(2) 初始對準誤差
INS通過積分慣性傳感器測量值計算導航結果,導航方程每一次迭代,都是以上一次導航結果作為初始值進行的,因此在進行INS導航計算時,必須對它進行初始化,位置和速度的初始化需要外部設備提供,可以選用GNSS用戶接收機。初始姿態信息可以通過外部信息提供,也可以由INS自身通過敏感重力矢量和地球自轉矢量來確定。初始化過程稱為對準,一般先對橫滾角和俯仰角初始化,再進行方位的初始化,因為前者的精度影響方位對準的精度。
其中加速度計輸出值的主要誤差為
陀螺儀輸出值的主要誤差為
方位誤差方程為
(6)
(3) 動態跟蹤誤差(INS誤差傳播)
引起INS產生位置、速度、姿態誤差的原因來自:加速度計和陀螺儀的測量誤差、導航方程近似和迭代頻率受到限制而影響精度的誤差、初始化誤差。加速度計和陀螺儀零偏經過導航方程積分,在位置、速度、姿態方面的誤差在不斷地積累,導航計算誤差也存在累積現象。姿態誤差傳遞到速度誤差,速度誤差再次累積傳遞到位置誤差,位置誤差通過重力模型對導航產生積極、消極兩方面的影響,因此完全確定INS誤差傳播中的誤差是一個非常復雜的問題,需要深入系統內部,對每一個環節都要控制精度。
3. 激光測距誤差
激光掃描儀的測距精度是機載LiDAR標定的重要指標之一。影響測距的誤差因子較多,測距模型可以表示為
L=L′+ξ1+ξ2+ξ3+ξ4
(7)
式中,L為距離改正值;L′為距離量測值;ξ1誤差是指激光掃描儀自身誤差;ξ2誤差是指大氣折射誤差;ξ3誤差指大氣擾動與激光束漂移誤差;ξ4誤差指回波強度對距離造成的影響。
(1)ξ1誤差
ξ1誤差模型為
ξ1=ΔR1+ΔR2+ΔR3+(K1L′+K2)
(8)
ξ1包括儀器本身常數修正、時間延遲誤差ΔR1、光電轉換及后置電路延遲誤差ΔR2、時間間隔誤差ΔR3。其大小與系統自身的性能、地形條件等外界條件有關。其中激光掃描儀自身的儀器常數,利用加常數K2和乘常數K1來對原始測定值進行修正,加常數是由于儀器電子中心與機械中心的不重合造成的,乘常數是由于測距頻率偏移而產生的。
(2)ξ2誤差
激光雷達的性能是與激光在大氣中的折射效應密切相關的,要充分發揮激光雷達的特性,就要修正大氣折射效應對激光腳點造成的定位誤差。大氣折射率為
n=1+N(λ,T,P,e)
(9)
式中,λ為激光波長;T為空氣溫度;P為大氣壓強;e為濕度;N為大氣折射率模數,量級為10-6,在標準大氣下,可見光-紅外波段激光的大氣折射率為
N0(λ)=272.579 4+1.583 2λ-2+0.015λ-4
(10)
由此,在任意情況下
N(λ)=N0(λ)(2.843 4×10-3P/T-0.112 7e/T)
(11)
由上述計算公式,精度可達10-8~10-7,N的計算通常寫為N=0.79P/T。
(3)ξ3誤差
ξ3誤差指大氣擾動與激光束漂移誤差,其中大氣擾動的折射率變化可以用結構函數來表示為
Dn(ρ)=<[n(r2)-n(r1)]2>
(12)
式中,r1、r2表示空間位置;n(r1)、n(r2)分別為相應位置的空氣折射率;ρ=r2-r1,代表距離;〈〉代表時間平均。從理論和實踐中得出,折射率的隨機變化和距離的1.5次方成比例,即
(13)
式中,Cn稱做l0到L0區間的結構參數,是折射率起伏變化的描述,它和大氣參數(如熱流、風速、高度)有關;l0為最小非均勻旋渦的尺寸,典型值為1~10 mm;L0為最大非均勻尺度,它和離地面的高度有關,近地表面處的干擾要大一些。消除這些誤差,可以采用機械和光學方法。
激光束漂移誤差:激光掃描儀都采用激光束的能量中心作為測量基準,采用復合棱鏡組可實現對光束能量中心漂移的補償。
(4)ξ4誤差
ξ4誤差指回波強度對距離造成的影響(不同地物對測距造成的誤差)。不同地物對測距造成的誤差,反映在回波強度對距離造成的影響上,將激光掃描儀的回波強度范圍設置為0~2047,盡可能多地細分等級,回波強度與目標地物的灰度值有一定的關系,一般灰度值越高,回波強度越大。通過多次試驗,統計出回波強度對距離改正表,見表1。
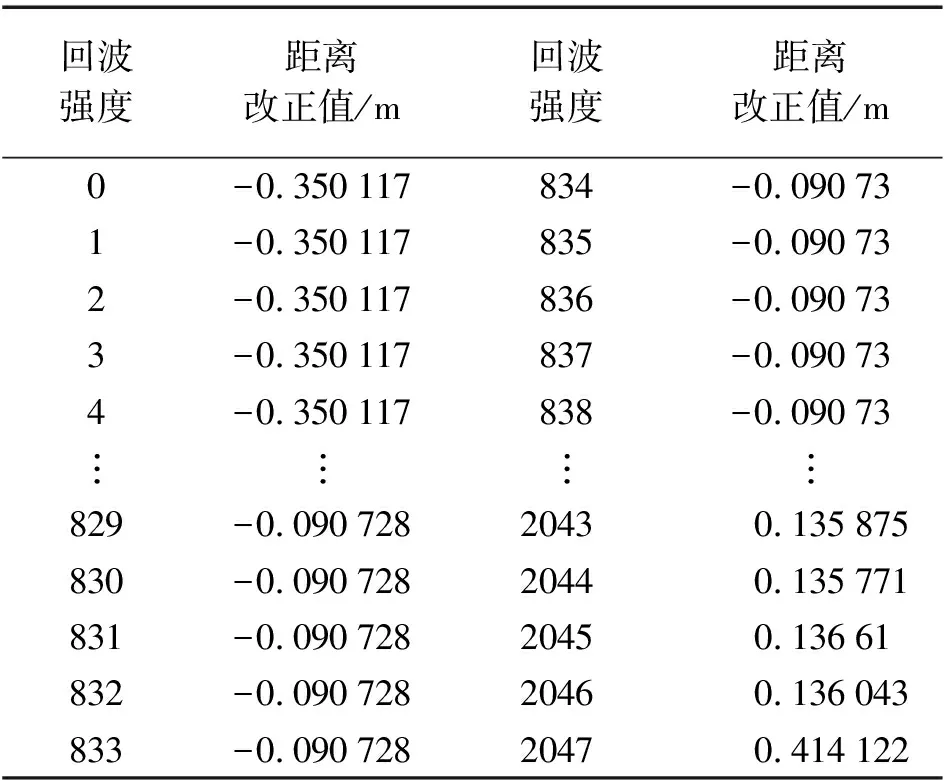
表1 回波強度對距離的改正
4. 激光測角誤差
機載LiDAR集成系統在進行作業的過程中,由于存在各種原因,會導致掃描角量算時存在測量誤差。對于旋轉掃描鏡,通常假定激光掃描儀內部的掃描鏡是勻速轉動,在以掃描行為單位的周期里,每個采樣點對應的掃描角是根據掃描視場角范圍之內與每行采樣點數計算的。但實際上,由于設備在制造的過程中不可能實現掃描鏡絕對的勻速轉動,因此以勻速轉動為前提計算的掃描角與實際情況存在一定的偏差。
掃描角誤差Δβ是在激光掃描儀工作過程中隨著掃描角β的變大而增加的,它實際上是繞X軸偏轉的一個比較小的角度,并且安裝時,激光掃描平面不可能絕對垂直于激光參考坐標系的X軸。這就使得實際的激光掃描平面繞激光參考坐標系各有一個小的旋轉角度Δφ、Δω。
掃描角誤差對定位的誤差模型由下列公式表達
(14)
式中,ΔXL、ΔYL、ΔZL代表激光坐標系下引起的偏移量;l為經過測距誤差改正后的值;a、b為激光掃描鏡內的固定參數;fx、fy、fz分別代表在激光坐標系X、Y、Z三方向定位函數;ΔRφ、ΔRω代表角度Δφ、Δω旋轉的誤差矩陣。
5. 系統集成安置誤差
(1) 偏心距誤差
偏心距誤差主要是指IMU中心到GNSS天線相位中心的距離及激光掃描儀中激光束發射點到IMU系統中心之間的距離的安置誤差。在系統集成之后,需要量測各傳感器之間的相對位置關系,而觀測存在誤差,導致偏心距誤差的產生。因此這兩偏心距必須測量準確。
(2) 視軸誤差
視軸誤差是指激光掃描坐標系與IMU坐標系之間的不平行導致的誤差,包括橫滾角誤差、俯仰角誤差和航向角誤差,這些誤差隨著時間逐漸發生變化,尤其在航帶重疊處可明顯看到,需要對采集數據進行檢校。定義飛行方向為Xb軸,旁向為Yb軸,高程方向為Zb軸,橫滾角誤差是逆著Xb軸逆時針選擇為正,隨著掃描角的增大,對測距造成的誤差變大;俯仰角誤差指逆著Yb軸逆時針旋轉為正;航向角誤差指逆著Zb軸逆時針旋轉為正,會造成測距不準確,主要會使航線軌跡發生扭曲。視軸誤差可以通過飛行特殊地物的檢校場,從點云數據中提取相應數據進行迭代運算,獲得橫滾角誤差、俯仰角誤差和航向角誤差,然后將其代入坐標計算數據模型中,計算點云的精確坐標。
6. 時間同步誤差
機載LiDAR系統各傳感器之間是獨立的,具有不同的時間記錄器。要獲取目標地物精確的三維信息,定位、定向、測距都必須保持在同一時刻進行。如果存在時間偏差,將會造成定位影響,并且這種影響造成的誤差是不斷發生變化的,并不是一個恒定的常量。為了獲取同一時刻的激光腳點的姿態、距離、位置信息,需統一各傳感器的時間系統到UTC時間系統中。該系統涉及3種時間同步:GNSS與IMU的時間同步、LiDAR與POS(GNSS/IMU)的時間同步、LiDAR與數字相機的時間同步。目前GNSS與IMU的時間同步主要是通過GNSS接收機提供1PPS(pluse-per-second)實現的;LiDAR與高精度POS的時間同步主要是通過激光掃描儀發送PPS脈沖信號給GNSS來實現的;LiDAR與數字相機之間的時間同步主要是依靠LiDAR控制系統發送脈沖給數字相機使相機曝光,從而實現GNSS、IMU、LiDAR、數字相機四者之間的時間同步。
7. 坐標轉換誤差
在坐標轉換的過程中,選擇不同坐標系之間的轉換,得到WGS-84坐標,而在一般工程應用中,需要將坐標轉換到平面坐標系下,這些工程中都存在著坐標轉換誤差。因此,可以根據工程需要,選擇相應精度的轉換模型和轉換參數。
8. 數據內插誤差
由于機載LiDAR集成系統內,各傳感器的采樣頻率不同,將造成數據處理過程中的數據內插誤差。一般激光掃描儀的頻率最高,可達到200 kHz,IMU最高采樣頻率為200 Hz,GNSS采樣頻率為1 Hz,相機可以根據需求設置頻率,來實現定點定時曝光。因此要想得到每個激光采樣點的位置和姿態,需要對GNSS與IMU數據進行內插處理,在進行航空攝影過程中,POS觀測歷元時刻ti與IMU的采樣時刻tj往往不能同步,一般認為飛機在航空攝影工作的過程中是勻速進行的,POS系統采用線性內插的方法進行,但實際上,飛機飛行速度很難保持勻速進行,同時對于每一個激光采樣點要獲取其位置和姿態,必須通過內插處理來獲取,將不可避免地存在數據內插誤差。
四、結束語
本文依據機載LiDAR系統的工作原理和坐標計算數據模型,介紹了系統內部各傳感器集成所產生的誤差和系統集成誤差,對誤差產生的原因和影響機制進行了分析,并對各種誤差處理方法進行了論述,這對于集成系統的精度分析有著重要的意義。
參考文獻:
[1] 張小紅.機載激光雷達測量技術理論與方法[M].武漢:武漢大學出版社,2007.
[2] 劉正軍, 徐勝攀,左志權,等.機載激光雷達數據處理軟件設計及關鍵技術研究[J].測繪通報,2012(12):91-93.
[3] 王長進.機載激光雷達道路勘察技術[M].北京:中國鐵道出版,2010.
[4] KAPLAN E D, HEGARTY C J. Understanding GNSS Principles and Application[M]. [S.l.]:Artech House,2006.
[5] 曾齊紅.機載激光雷達點云數據處理與建筑物三維重建[D].上海:上海大學,2009.
[6] 舒寧.激光成像[M].武漢:武漢大學出版社,2005.
[7] 格魯夫. GNSS與慣性及多傳感器組合導航系統原理[M].北京:國防工業出版社,2011.
[8] 孫長庫,何明霞.激光測量技術[M].天津:天津大學出版社,2008.
[9] 王成,MENENTI M,STOLM P,等.機載激光雷達數據的誤差分析及校正[J].遙感學報,2007(3):390-397.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
